



-
摘要:
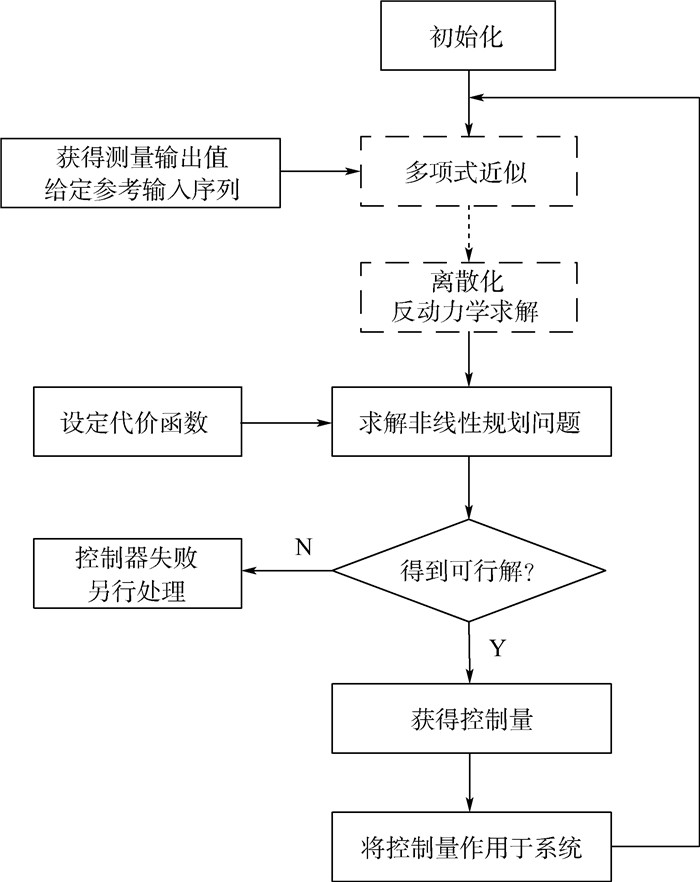
针对在线轨迹实时规划算法,提出了一种基于虚拟域预测控制的轨迹跟踪方法。该方法采用多项式近似系统模型,引入虚拟路径及反动力解算方法,将时域转化为虚拟域,较在时域上近似模型的控制方法解耦效果好,实时性强。通过反动力学解算、非线性规划的输入设置可直接得到连续的控制量,相对于传统非线性预测控制的软约束的方法,从根本上保证了控制量的连续性。以拦截弹道导弹为背景,在初始状态量添加小扰动及末端条件改变的条件下,进行仿真验证。结果表明:与非线性反馈跟踪方法相比,曲线平滑,在遭遇点脱靶量、末端路径倾角及偏角误差较小,实时性同样可满足控制需求。
Abstract:A trajectory tracking method based on predictive control in the virtual domain is proposed for the algorithm of online real-time trajectory planning. The method uses polynomial approximate system model and introduces virtual path and inverse dynamics to convert time domain into virtual domain. Its advantage is that the decoupling effect is good and it takes less compute time than the control method of approximate model in the time domain. Through inverse dynamics, the import configuration of nonlinear programming ensures the continuous controls, which cannot be guaranteed by the nonlinear predictive control of traditional soft constraint method. In the background of intercepting ballistic missiles, simulation verification is carried out under the condition of initial minor disturbances and terminal condition change. The simulation results demonstrate that, compared with nonlinear feedback tracking method, the curve is smooth, the miss distance, pitch angle error and yaw angle error are small, and instantaneity can meet the control requirements.
-
Key words:
- missile /
- control theory /
- nominal guidance law /
- trajectory tracking /
- predictive control /
- interception
-

图 5 拦截弹路径倾角、路径偏角、速度、侧向过载及法向过载变化
Figure 5. Trajectory angle, yaw angle, velocity, side load and normal load variation of interceptor

图 6 遭遇点位置改变时的拦截弹轨迹
Figure 6. Trajectories of interceptor when point of encounter is changed

图 7 遭遇点位置改变时的拦截弹路径倾角、路径偏角、速度、侧向过载及法向过载变化
Figure 7. Trajectory angle, yaw angle, velocity, side load and normal load variation of interceptor when point of encounter position is changed
表 1 拦截弹初始条件
Table 1. Initial conditions for interceptor
参数 数值 位置(x, y, z)/km (100, 100, 8.460) V/(m·s-1) 566 γ/(°) 0 ψ/(°) -133  下载: 导出CSV
下载: 导出CSV
表 2 拦截弹末端条件
Table 2. Final conditions for interceptor
参数 数值 (x, y, z)/km (20.533, 0, 29.216) γ/(°) 0 ψ/(°) -107.647
下载: 导出CSV
表 3 初始小扰动及终端输出误差
Table 3. Different initial minor disturbances and corresponding output errors at end of interception
方案 (x, y, z)/km V/(m·s-1) γ/(°) ψ/(°) 脱靶量/m Eγ/(°) Eψ/(°) CPU计算时间/s 1 (105, 105, 8.883)(+5%) 566 0 -133 0.231 0.119 0.163 0.011 5 2 (100, 100, 8.460) 594.3(+5%) 0 -133 0.437 0.147 0.203 0.014 5 3 (100, 100, 8.460) 566 2 -133 0.195 0.298 0.097 0.013 7 4 (100, 100, 8.460) 566 0 -130.3(+2%) 0.275 0.147 0.359 0.013 9 5 (105, 105, 8.883)(+5%) 594.3(+5%) 2 -130.3(+2%) 0.493 0.510 0.529 0.015 2 FL[20] (105, 105, 8.883)(+5%) 594.3(+5%) 2 -130.3(+2%) 1.543 1.589 1.641 0.009 2
下载: 导出CSV
表 4 遭遇点位置改变及终端输出误差
Table 4. Changes of point encounter position and corresponding output errors at end of interception
方案 时间/s 拦截弹位置/km 目标位置/km 脱靶量/m Eγ/(°) Eψ/(°) 1 3 (104.383, 104.337, 8.481) (20, 0, 29) 0.193 0.119 0.163 2 20.1 (76.923, 77.943, 11.649) (14.6, 0, 20) 0.165 0.127 0.161 3 30.8 (45.648, 50.222, 18.144) (11, 0, 15) 0.183 0.115 0.174
下载: 导出CSV
-
[1] HALBE O, RAJA R G, PADHI R.Robust reentry guidance of a reusable launch vehicle using model predictive static programming[J].Journal of Guidance, Control, and Dynamics, 2013, 37(1):134-148. doi: 10.2514/1.61615 [2] HARL N, BALAKRISHNAN S N.Reentry terminal guidance through sliding mode control[J].Journal of Guidance, Control, and Dynamics, 2010, 33(1):186-199. doi: 10.2514/1.42654 [3] 闫梁, 赵继广, 李辕.带约束碰撞角的顺/逆轨制导律设计[J].北京航空航天大学学报, 2015, 41(5):857-863. http://bhxb.buaa.edu.cn/CN/abstract/abstract13246.shtmlYAN L, ZHAO J G, LI Y.Guidance law with angular constraints for head-pursuit or head-on engagement[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(5):857-863(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13246.shtml [4] TANAKA A, MAEDA H.Studies on the time-to-go indexing control scheme for an automatic aircraft landing system[J].Transactions of the Japan Society for Aeronautical and Space Sciences, 1973, 16(31):1-18. [5] YAKIMENKO O A.Shortcut-time spatial trajectories on-board optimization and their cognitive head-up display visualization for pilot's control actions during manoeuvring support[C]//International Congress on Instrumentation in Aerospace Simulation Facilities, 1997.Piscataway, NJ:IEEE Press, 1997:246-256. [6] JUNG Y C, HESS R A.Precise flight-path control using a predictive algorithm[J].Journal of Guidance, Control, and Dynamics, 1991, 14(5):936-942. doi: 10.2514/3.20734 [7] GIBBENS P W, MEDAGODA E D B.Efficient model predictive control algorithm for aircraft[J].Journal of Guidance, Control, and Dynamics, 2011, 34(6):1909-1915. doi: 10.2514/1.52162 [8] LU P, PIERSON B L.Aircraft terrain following based on a nonlinear continuous predictive control approach[J].Journal of Guidance, Control, and Dynamics, 1995, 18(4):817-823. doi: 10.2514/3.21464 [9] LUKACS J A I, YAKIMENKO O A.Trajectory-shaping guidance for interception of ballistic missiles during the boost phase[J].Journal of Guidance, Control, and Dynamics, 2008, 31(5):1524-1531. doi: 10.2514/1.32262 [10] DWIVEDI P N, BHATTACHARYA A, PADHI R.Suboptimal midcourse guidance of interceptors for high-speed targets with alignment angle constraint[J].Journal of Guidance, Control, and Dynamics, 2011, 34(3):860-877. doi: 10.2514/1.50821 [11] LU Z L.Ballistic missile interception from UCAV[D].Monterey:Naval Postgraduate School, 2011. [12] GUO Y, HAWKINS M, WIE B.Waypoint-optimized zero-effort-miss/zero-effort-velocity feedback guidance for mars landing[J].Journal of Guidance, Control, and Dynamics, 2013, 36(3):799-809. doi: 10.2514/1.58098 [13] YU Z, CUI P, ZHU S.Observability-based beacon configuration optimization for mars entry navigation[J].Journal of Guidance, Control, and Dynamics, 2014, 38(4):643-650. doi: 10.2514%2F1.G000014 [14] BLACKMORE L, ACIKMESE B, SCHARF D P.Minimum-landing-error powered-descent guidance for Mars landing using convex optimization[J].Journal of Guidance, Control, and Dynamics, 2010, 33(4):1161-1171. doi: 10.2514/1.47202 [15] KLUEVER C A.Entry guidance performance for Mars precision landing[J].Journal of Guidance, Control, and Dynamics, 2008, 31(6):1537-1544. doi: 10.2514/1.36950 [16] SHEN H, SEYWALD H, POWELL R W.Desensitizing the minimum-fuel powered descent for Mars pinpoint landing[J].Journal of Guidance, Control, and Dynamics, 2010, 33(1):108-115. doi: 10.2514/1.44649 [17] WINGROVE R C.Survey of atmosphere re-entry guidance and control methods[J].AIAA Journal, 1963, 1(9):2019-2029. doi: 10.2514/3.1987 [18] 闫梁, 李辕, 赵继广, 等.基于变节点虚拟域动态逆的轨迹实时优化[J].航空学报, 2013, 34(12):2794-2803. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201312018.htmYAN L, LI Y, ZHAO J G, et al.Trajectory real-time optimization based on variable node inverse dynamics in the virtual domain[J].Acta Aeronautica et Astronautica Sinica, 2013, 34(12):2794-2803(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201312018.htm [19] ROENNEKE A J, CORNWELL P J.Trajectory control for a low-lift re-entry vehicle[J].Journal of Guidance, Control, and Dynamics, 1993, 16(5):927-933. doi: 10.2514/3.21103 [20] BHARADWAJ S, RAO A V, MEASE K D.Entry trajectory tracking law via feedback linearization[J].Journal of Guidance, Control, and Dynamics, 1998, 21(5):726-732. doi: 10.2514/2.4318 [21] LU P.Entry guidance and trajectory control for reusable launch vehicle[J].Journal of Guidance, Control, and Dynamics, 1997, 20(1):143-149. doi: 10.2514/2.4008 [22] LU P, HANSON J M.Entry guidance for the X-33 vehicle[J].Journal of Spacecraft and Rockets, 1998, 35(3):342-349. doi: 10.2514/2.3332 [23] JOOS A, MULLER M A, BAUMGARTNER D, et al.Nonlinear predictive control based on time-domain simulation for automatic landing:AIAA-2011-6298[R].Reston:AIAA, 2011. [24] CHEN H, ALLGÖWER F.Quasi-infinite horizon nonlinear model predictive control scheme with guaranteed stability[J].Automatica, 1998, 34(10):1205-1217. doi: 10.1016/S0005-1098(98)00073-9 [25] CHEN H, ALLGÖWER F.Computationally attractive nonlinear predictive control scheme with guaranteed stability for stable systems[J].Journal of Process Control, 1998, 8(5-6):475-485. doi: 10.1016/S0959-1524(98)00021-3 [26] SLEGERS N, KYLE J, COSTELLO M.Nonlinear model predictive control technique for unmanned air vehicles[J].Journal of Guidance, Control, and Dynamics, 2006, 29(5):1179-1188. doi: 10.2514/1.21531 [27] HESS R A, JUNG Y C.Application of generalized predictive control to rotorcraft terrain-following flight[J].IEEE Transactions on Systems, Man and Cybernetics, 1989, 19(5):955-962. doi: 10.1109/21.44010 [28] YAKIMENKO O A.Direct method for rapid prototyping of near-optimal aircraft trajectories[J].Journal of Guidance, Control, and Dynamics, 2000, 23(5):865-875. doi: 10.2514/2.4616 [29] BASSET G, XU Y, YAKIMENKO O A.Computing short-time aircraft maneuvers using direct methods[J].Journal of Computer and Systems Sciences International, 2010, 49(3):481-513. doi: 10.1134/S1064230710030159 [30] BOYARKO G A, ROMANO M, YAKIMENKO O A.Time-optimal reorientation of a spacecraft using an inverse dynamics optimization method[J].Journal of Guidance, Control, and Dynamics, 2011, 34(4):1197-1208. doi: 10.2514/1.49449 [31] LEW J, JUANG J.Robust generalized predictive control with uncertainty quantification[J].Journal of Guidance, Control, and Dynamics, 2012, 35(3):930-937. doi: 10.2514/1.54510 [32] AVANZINI G, THOMSON D, TORASSO A.Model predictive control architecture for rotorcraft inverse simulation[J].Journal of Guidance, Control, and Dynamics, 2012, 36(1):207-217. [33] SUN L, HEDENGREN J D, BEARD R W.Optimal trajectory generation using model predictive control for aerially towed cable systems[J].Journal of Guidance, Control, and Dynamics, 2014, 37(2):525-539. doi: 10.2514/1.60820 [34] 李辕, 赵继广, 闫梁, 等.拦截高速机动目标三维联合比例制导律设计[J].北京航空航天大学学报, 2015, 41(5):825-834. http://bhxb.buaa.edu.cn/CN/abstract/abstract13242.shtmlLI Y, ZHAO J G, YAN L, et al.United-proportional-navigation law for interception of high-speed maneuvering targets[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(5):825-834(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13242.shtml [35] TANG W, CAI Y.Predictive functional control-based missile autopilot design[J].Journal of Guidance, Control, and Dynamics, 2012, 35(5):1450-1455. doi: 10.2514/1.56329 [36] LUO Y, SERRANI A, YURKOVICH S, et al.Model-predictive dynamic control allocation scheme for reentry vehicles[J].Journal of Guidance, Control, and Dynamics, 2007, 30(1):100-113. doi: 10.2514/1.25473 [37] WILLIAMS P.Libration control of electrodynamic tethers using predictive control with time-delayed feedback[J].Journal of Guidance, Control, and Dynamics, 2009, 32(4):1254-1268. doi: 10.2514/1.41039 [38] ARDEMA M D.Solution of the minimum time-to-climb problem by matched asymptotic expansions[J].AIAA Journal, 1976, 14(7):843-850. doi: 10.2514/3.7161 [39] KUO Z, LIU K.Explicit guidance of aeroassisted orbital transfer using matched asymptotic expansions[J].Journal of Guidance, Control, and Dynamics, 2002, 25(1):80-87. doi: 10.2514/2.4852 [40] 李辕, 赵继广, 白国玉, 等.基于预测碰撞点的剩余飞行时间估计方法[J].北京航空航天大学学报, 2016, 42(8):1667-1674. http://bhxb.buaa.edu.cn/CN/abstract/abstract13404.shtmlLI Y, ZHAO J G, BAI G Y, et al.Method of time-to-go estimation based on predicted crack point[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8):1667-1674(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13404.shtml [41] CARTER J P, PERLMUTTER L D.Reference trajectory re-entry guidance without prelaunch data storage[J].Journal of Spacecraft and Rockets, 1965, 2(6):967-970. doi: 10.2514/3.28325 [42] TANNAS J L E.Manual entry guidance[J].Journal of Spacecraft and Rockets, 1966, 3(2):175-181. doi: 10.2514/3.28415 [43] LEAVITT J A, MEASE K D.Feasible trajectory generation for atmospheric entry guidance[J].Journal of Guidance, Control, and Dynamics, 2007, 30(2):473-481. doi: 10.2514/1.23034 [44] KLUEVER C A.Entry guidance using analytical atmospheric skip trajectories[J].Journal of Guidance, Control, and Dynamics, 2008, 31(5):1531-1535. doi: 10.2514/1.32314 [45] JOSHI A, SIVAN K, AMMA S S.Predictor-corrector reentry guidance algorithm with path constraints for atmospheric entry vehicles[J].Journal of Guidance, Control, and Dynamics, 2007, 30(5):1307-1318. doi: 10.2514/1.26306 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 648
- HTML全文浏览量: 34
- PDF下载量: 680
- 被引次数: 0
