



-
摘要:
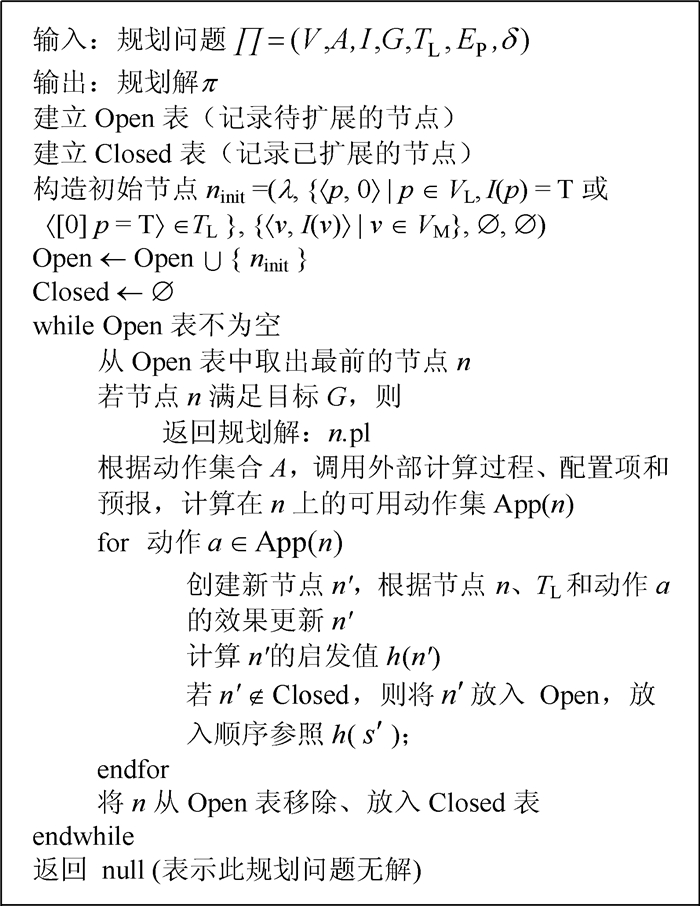
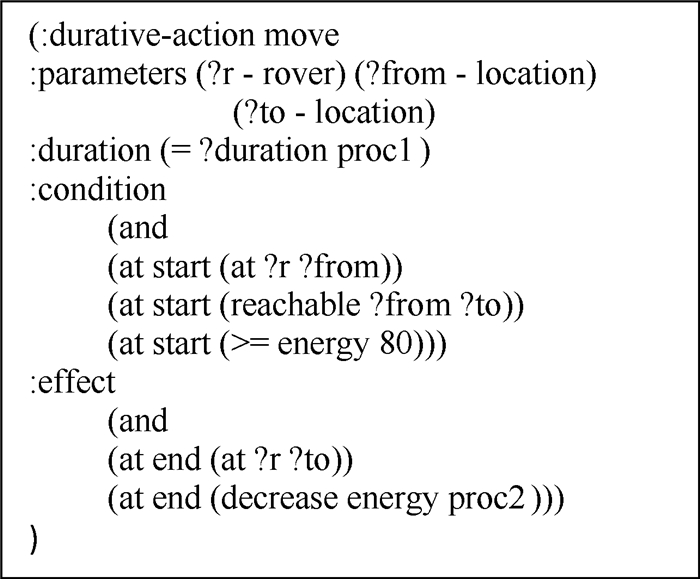
为支持“玉兔号”巡视器完成对月面较大空间范围的科学探测,对动态任务进行快速规划,提出了一种基于人工智能领域智能规划技术的自动化任务规划方法。提出了行为持续时间和行为效果动态确定的时态规划模型(TPDD&DE),设计了描述TPDD&DE问题的规划领域定义语言PDDL——PDDLDD&DE,以及针对TPDD&DE问题的启发式规划算法,运用Landmark知识分析规划问题结构,从而设计了合理反映动作前提评估顺序的启发函数。在嫦娥三号任务中,本文方法支撑“玉兔号”巡视器圆满完成了预期的科学探测任务。
Abstract:To enable the "Jade Rabbit" rover to plan fast in a dynamic work environment on the lunar surface, an activity planning model called temporal planning with dynamic duration and dynamic effect (TPDD&DE) was developed based on the automated planning technology of artificial intelligence. This model extends temporal planning to incorporate external computing procedures and to support durations of actions to be determined dynamically. To describe tasks of TPDD&DE, an extension of the planning domain definition language(PDDL), called PDDLDD&DE, was designed. A planning system that is based on the heuristic state space search framework was developed to solve the planning problem. By utilizing the "proposition Landmarks analysis" technique, we designed a heuristic function that accounts for reasonable orderings of actions' preconditions and is capable of getting better goal distance estimates for states. With the successful completion of Chang'E-3 mission, the proposed method played a key role in supporting the "Jade Rabbit" rover to fulfill its exploration tasks on the moon.
-
Key words:
- lunar surface rover /
- activity planning /
- automated planning /
- task modeling /
- heuristic search
-

图 1 动作持续时间和资源变量与外部计算过程的映射
Figure 1. Description of mappings from action durations and resource variables to external computation procedures
表 1 某次规划任务的规划解
Table 1. Plan of a mission planning task
序号 开始时刻 动作名称 持续时长/s 001 26 539 〈EnterTrackAction xsq〉 1 320 002 27 859 〈WorkAction xsq spot0 init M0_MS_GZ〉 10 290 003 38 149 〈MoveAction xsq spot0 M0_MS_GZ M1_MS_YDMZ〉 270 004 38 419 〈MoveEffect xsq spot0 spot1〉 0 005 38 419 〈WorkAction xsq spot1 M1_MS_YDMZ M2_MS_GZ〉 10 290 006 48 709 〈MoveAction xsq spot1 M2_MS_GZ M3_MS_YDMZ〉 270 007 48 979 〈MoveEffect xsq spot1 spot2〉 0 008 48 979 〈WorkAction xsq spot2 M3_MS_YDMZ M4_MS_GZ〉 10 290 009 59 269 〈MoveAction xsq spot2 M4_MS_GZ M5_MS_YDMZ〉 270 010 59 539 〈MoveEffect xsq spot2 spot3〉 0 011 671 460 〈WorkAction xsq spot3 M5_MS_YDMZ M6_MS_GZ〉 10 290 027 776 383 〈MoveAction xsq spot7 M14_MS_GZ M15_MS_YDMZ〉 270  下载: 导出CSV
下载: 导出CSV
-
[1] IP W H,YAN J,LI C L,et al.Preface:The Chang'e-3 lander and rover mission to the Moon[J].Research in Astronomy & Astrophysics,2014,14(12):1511-1513. http://cn.bing.com/academic/profile?id=fb48587a2f11433f818db8bc4e88f01c&encoded=0&v=paper_preview&mkt=zh-cn [2] 吴伟仁,周建亮,王保丰,等.嫦娥三号"玉兔号"巡视器遥操作中的关键技术[J].中国科学:信息科学,2014,44(4):425-440. http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201404001.htmWU W R,ZHOU J L,WANG B F,et al.Key technologies in the teleoperation of Chang'E-3"Jade Rabbit" rover[J].Science China:Information Sciences,2014,44(4):425-440(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201404001.htm [3] 贾阳,张建利,李群智,等.嫦娥三号巡视器遥操作系统设计与实现[J].中国科学:技术科学,2014,44(5):470-482. http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201405005.htmJIA Y,ZHANG J L,LI Q Z,et al.Design and realization for teleoperation system of the Chang'e-3 rover[J].Science in China Series E:Technological Sciences,2014,44(5):470-482(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201405005.htm [4] 欧阳琦,姚雯,陈小前.地球同步轨道卫星群在轨加注任务规划[J].宇航学报,2010,31(12):2629-2634. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201012003.htmOUYANG Q,YAO W,CHEN X Q.Mission programming of on-orbit refueling for geosynchronous satellites[J].Journal of Astronautics,2010,31(12):2629-2634(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201012003.htm [5] 李革非,陈莉丹,唐歌实,等.多约束交会对接发射窗口的分析和规划[J].宇航学报,2011,32(11):2463-2470. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201111025.htmLI G F,CHEN L D,TANG G S,et al.Analysis and programming of rendezvous launch window with multi-constraints[J].Journal of Astronautics,2011,32(11):2463-2470(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201111025.htm [6] 周建亮,谢圆,张强,等.月面巡视器遥操作中的任务规划技术研究[J].中国科学:信息科学,2014,44(4):441-451. http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201404002.htmZHOU J L,XIE Y,ZHANG Q,et al.Research on mission planning in teleoperation of lunar rovers[J].Science China:Information Sciences,2014,44(4):441-451(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201404002.htm [7] HOFFMANN J.Everything you always wanted to know about planning[C]//KI 2011:Advances in Artificial Intelligence.Berlin:Springer-Verlag,2011:1-13. [8] FOX M,LONG D.PDDL2.1:An extension to PDDL for expressing temporal planning domains[J].Journal of Artificial Intelligence Research,2003,20:61-124. http://cn.bing.com/academic/profile?id=184f91244b5318ef74cb9844123d6ede&encoded=0&v=paper_preview&mkt=zh-cn [9] CAI D B,HOFFMANN J,HELMERT M.Enhancing the context-enhanced additive heuristic with precedence constraints[C]//Proceedings of the 19th International Conference on Automated Planning and Scheduling (ICAPS).Menlo Park,California:AAAI Press,2009:50-57. [10] HU Y M,YIN M H,CAI D B.On the discovery and utility of precedence constraints in temporal planning[C]//Proceedings of the 25 th AAAI Conference on Artificial Intelligence (AAAI).Menlo Park,California:AAAI Press,2011:1788-1789. [11] RABIDEAU G,KNIGHT R,CHIEN S,et al.Iterative repair planning for spacecraft operations in the ASPEN system[C]//Proceedings of the 5th International Symposium on Artificial Intelligence,Robotics and Automation in Space.Noordwijk:ESA Publications Division,1999,440:99-106. [12] BARREIRO J,BOYCE M,FRANK J,et al.EUROPA:A platform for timeline-based AI planning,scheduling,constraint programming,and optimization[C]//Proceedings of ICAPS 2012 Workshop on Planning and Scheduling with Timelines.Atibaia:ICAPS,2012:6-7. [13] SMITH D E,FRANK J,CURSHING W.The anml language[C/OL]//Proceedings of the ICAPS 2008 Workshop on Knowledge Engineering for Planning and Scheduling (KEPS).Sydney:ICAPS,2008[2016-08-13].http://ktiml.mff.cuni.cz/~bartak/KEPS2008/download/paper07.pdf. [14] GEREVINI A,SAETTI A,SERINA I.An approach to temporal planning and scheduling in domains with predictable exogenous events[J].Journal of Artificial Intelligence Research,2006,25:187-231. http://cn.bing.com/academic/profile?id=a71380e548f20cb7d65ea4d4af38ccde&encoded=0&v=paper_preview&mkt=zh-cn [15] EDELKAMP S,HOFFMANN J.PDDL2.2:The language for the classical part of the 4th international planning competition[R].Freiburg:Albert-Ludwigs-Universität Freiburg,2004:1-21. [16] GEREVINI A,LONG D.Plan constraints and preferences in PDDL3[R].Brescia:University of Brescia,2005:1-12. [17] HELMERT M.The fast downward planning system[J].Journal of Artificial Intelligence Research,2006,26:191-246. doi: 10.1007/s10462-007-9049-y [18] DO M B,KAMBHAMPATI S.Sapa:A multi-objective metric temporal planner[J].Journal of Artificial Intelligence Research,2003,20:155-194. http://cn.bing.com/academic/profile?id=976fef1eacc21655c720fb7a54c752c5&encoded=0&v=paper_preview&mkt=zh-cn [19] EYERICH P,MATTMVLLER R,RÖGER G.Using the context-enhanced additive heuristic for temporal and numeric planning[M].Heidelberg:Springer,2012:49-64. [20] HOFFMANN J,PORTEOUS J,SEBASTIA L.Ordered landmarks in planning[J].Journal of Artificial Intelligence Research,2004,22:215-278. http://cn.bing.com/academic/profile?id=3c06ac4b7fb8abf425a4473eb654dcdf&encoded=0&v=paper_preview&mkt=zh-cn -

 下载:
下载:

 点击查看大图
点击查看大图
计量
- 文章访问数: 790
- HTML全文浏览量: 35
- PDF下载量: 505
- 被引次数: 0
