



Frequent reset suppression algorithm of digital phase ramp in fiber optic gyroscope
-
摘要:
针对光纤陀螺在小角速度测量时存在数字相位斜波频繁复位的问题,建立了调制增益漂移条件下复位相位误差模型,分析了数字相位斜波频繁复位的机理和产生的条件。证明了数字相位斜波频繁复位是产生死区的因素之一。提出了一种具有类似施密特触发器特性的数字斜波滞回复位算法,通过分离数字相位斜波正负向累加区间,抑制频繁复位及其引起的死区。实验结果表明,在调制增益变小1%时,采用滞回复位算法可将死区范围从测量噪声的3倍减小至1倍左右。
Abstract:In view of the problem that the digital phase ramp in fiber optic gyroscope resets frequently at the small angular velocity measurement, the reset phase error is modeled under the condition of the gain drift of the modulation chain. Then the mechanism and condition are analyzed for the frequent reset of the digital phase ramp. It is proved that the frequent reset is one of the factors generating the dead band. A hysteresis reset algorithm of the digital ramp is proposed, which has the similar characteristics with the Schmitt trigger. The algorithm suppresses the frequent reset and resulting dead band by means of separating the positive and negative ramp accumulation interval. The experimental results show that the hysteresis reset algorithm can decrease the dead band from three times to one time measurement noise when the modulation gain lessens by 1%.
-
Key words:
- fiber optic gyroscope /
- gain drift /
- automatic reset /
- dead band /
- hysteresis reset algorithm
-


图 2 输入角速度为2 228 (°)/h时相位台阶与相位斜波仿真波形
Figure 2. Simulation waveform of phase step and phase ramp when input angular velocity is 2 228 (°)/h

图 3 输入角速度为50 (°)/h时相位台阶与相位斜波仿真波形
Figure 3. Simulation waveform of phase step and phase ramp when input angular velocity is 50 (°)/h

图 4 频繁复位时间占比与输入角速度的关系
Figure 4. Relationship between frequent reset time proportion and input angular velocity

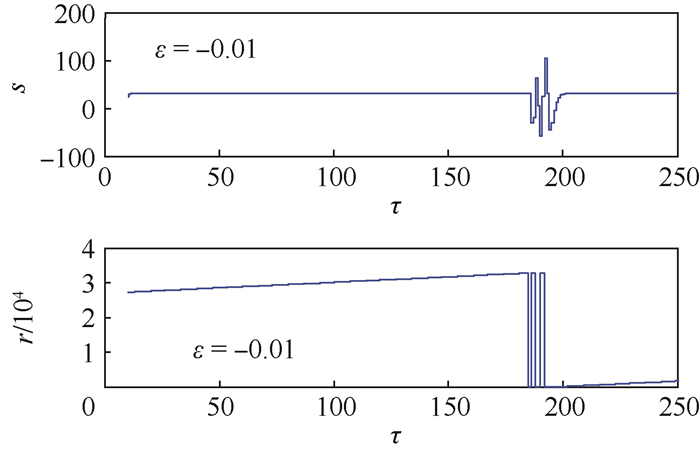
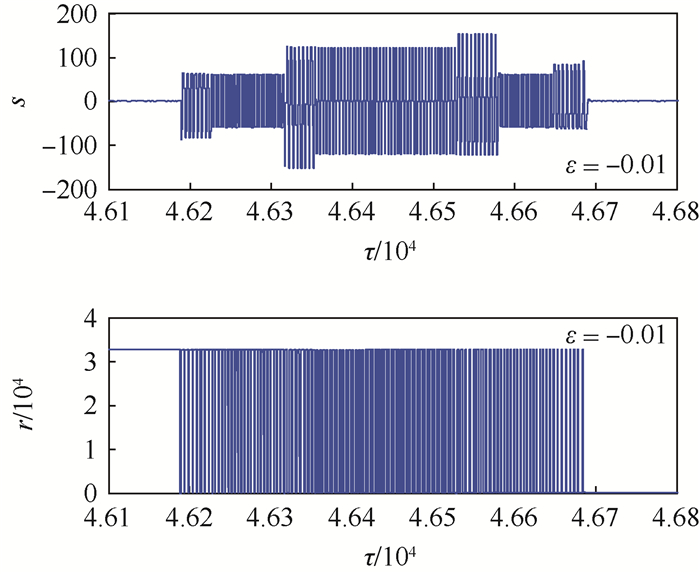
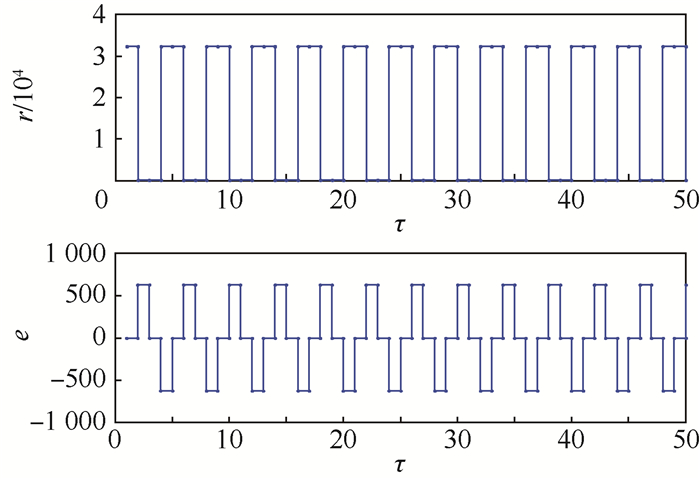
图 5 斜波频繁复位时相位斜波与相位误差仿真波形
Figure 5. Simulation waveform of phase ramp and phase error when ramp resets frequently

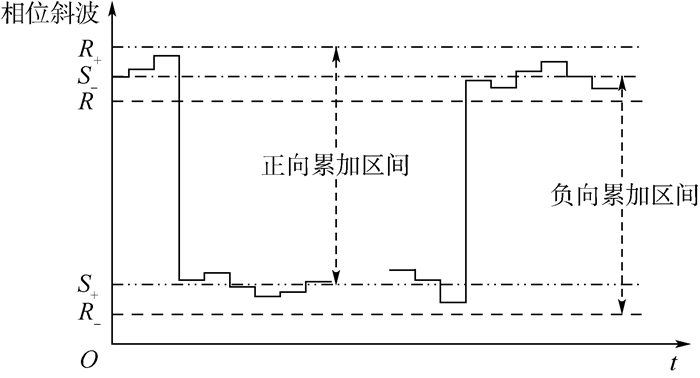
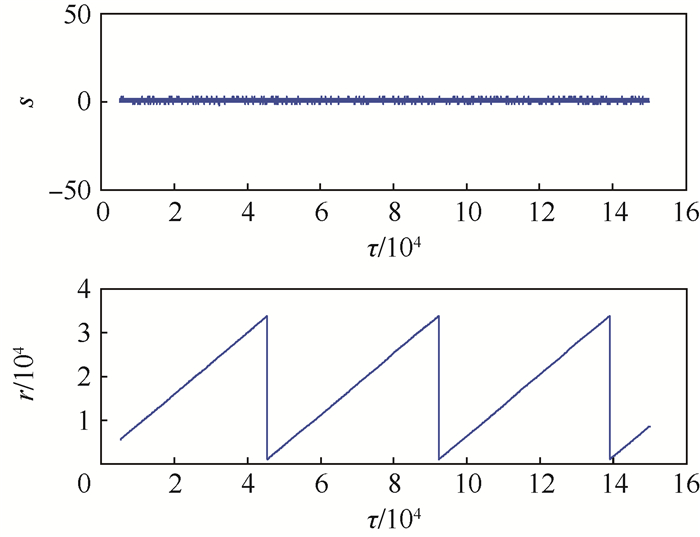
图 7 调制增益未漂移时斜波滞回复位仿真
Figure 7. Ramp hysteresis reset simulation with no modulation gain drift

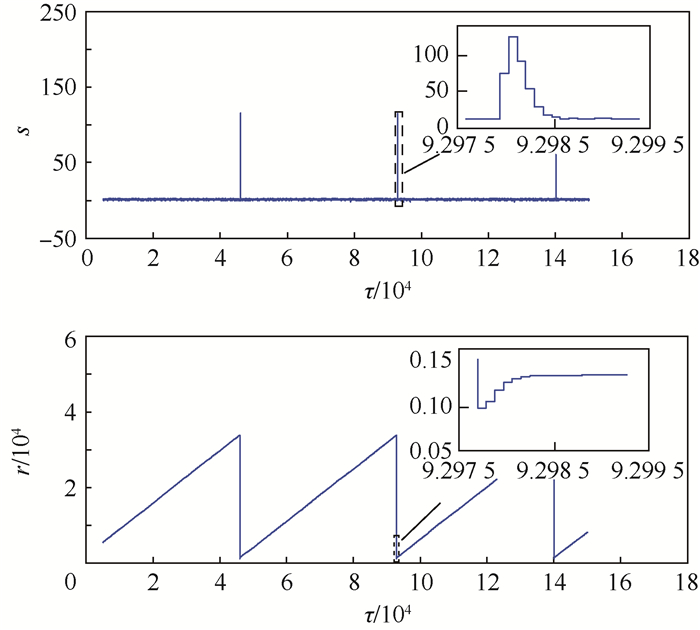
图 8 调制增益变大时斜波滞回复位仿真
Figure 8. Ramp hysteresis reset simulation when modulation gain largens

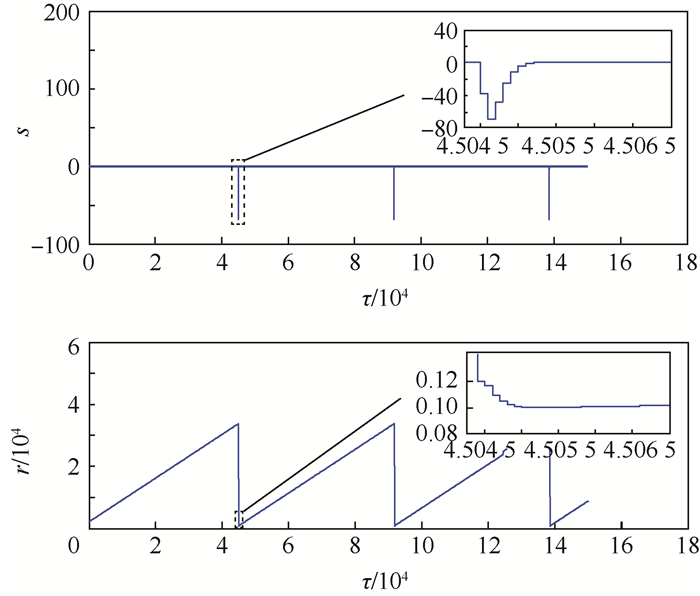
图 9 调制增益变小时斜波滞回复位仿真
Figure 9. Ramp hysteresis reset simulation when modulation gain lessens

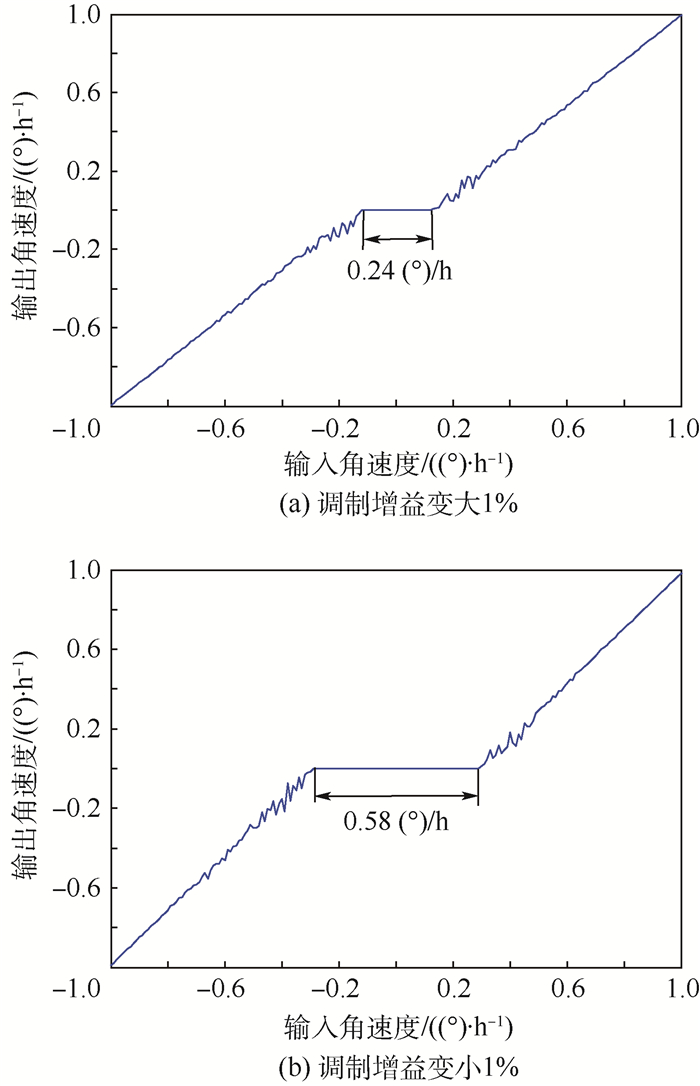
图 10 调制增益分别变大、变小1%时输入-输出关系
Figure 10. Relationship between input and output when modulation gain largens or lessens by 1%

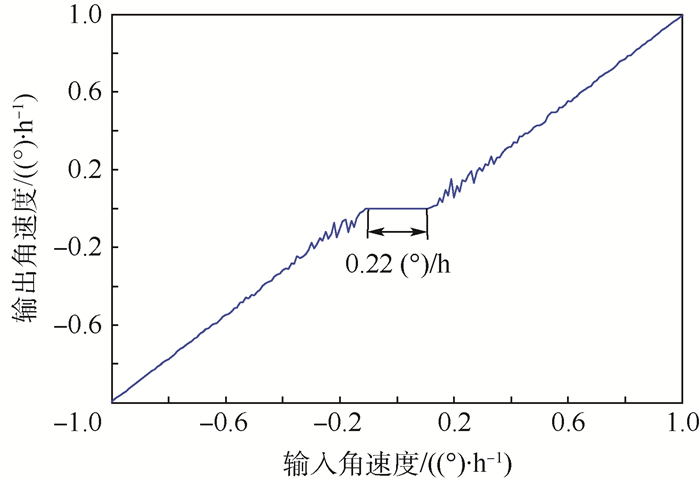
图 11 调制增益变小1%时采用滞回复位算法的输入-输出关系
Figure 11. Relationship between input and output with hysteresis reset algorithm when modulation gain lessens by 1%
表 1 实验所用光纤陀螺设计参数
Table 1. Design parameters of experiment fiber optic gyroscope
参数 设计值 Ks/s 0.551 6 KD/(LSB·rad-1) 998.4 KF/(rad·LSB-1) 1.92×10-4 注:LSB(Least Significant Bit)—最低有效位。  下载: 导出CSV
下载: 导出CSV
-
[1] LEFEÈVRE H C.The fiber-optic gyroscope[M].2nd ed.Boston:Artech House, 2014:119-150. [2] LEFEÈVRE H C, MARTIN P, MORISSE J, et al.High-dynamic-range fiber gyro with all-digital signal processing[C]//Fiber Optic and Laser Sensors Ⅷ.Bellingham, WA:SPIE, 1996, 1367:72-80. [3] 金靖, 宋凝芳, 李立京.干涉型光纤陀螺温度漂移建模与实时补偿[J].航空学报, 2007, 28(6):1449-1454. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200706032.htmJIN J, SONG N F, LI L J.Temperature drift modeling and real-time compensation of interferometric fiber optic gyroscope[J].Acta Aeronautica et Astronautica Sinica, 2007, 28(6):1449-1454(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB200706032.htm [4] 王海.光纤陀螺温度影响与误差补偿[J].北京航空航天大学学报, 2007, 33(5):549-551. http://bhxb.buaa.edu.cn/CN/abstract/abstract9555.shtmlWANG H.Affects of temperature and error compensation for fiber optic gyro[J].Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(5):549-551(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract9555.shtml [5] 张勇, 李绪友, 王南, 等.高精度数字闭环光纤陀螺的调制增益控制[J].哈尔滨工程大学学报, 2008, 29(11):1172-1175. doi: 10.3969/j.issn.1006-7043.2008.11.006ZHANG Y, LI X Y, WANG N, et al.Modulation gain control of high-precision digital closed-loop fiber optic gyroscope[J].Journal of Harbin Engineering University, 2008, 29(11):1172-1175(in Chinese). doi: 10.3969/j.issn.1006-7043.2008.11.006 [6] 王妍, 张春熹.带第二反馈回路的全数字闭环光纤陀螺[J].压电与声光, 2005, 27(4):348-351. http://www.cnki.com.cn/Article/CJFDTOTAL-YDSG200504004.htmWANG Y, ZHANG C X.All digital closed-loop fiber optic gyroscope with the second feedback loop[J].Piezoelectrics & Acoustooptics, 2005, 27(4):348-351(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YDSG200504004.htm [7] MA D Y, SONG N F, SONG J M, et al.The novel arithmetic and realization based on FPGA module design for the real time compensation of the reset error in FOG[C]//The 2nd International Conference on Information Science and Engineering.Piscataway, NJ:IEEE Press, 2010:738-741. [8] MA D Y, SONG N F, PAN X, et al.Binary code compression algorithm used for the real time compensation of the modulation error in miniaturized FOG[J].Optical Fiber Technology, 2011, 17(4):267-272. doi: 10.1016/j.yofte.2011.04.001 [9] WANG W, WANG J L, ZHAO Z X.Method to control the gain in modulation chain of closed-loop fiber optic gyroscope with periodical biasing modulation[J].Optical Engineering, 2012, 51(6):1-5. [10] LI H, BI L, LI L J, et al.Tracking algorithm for the gain of the phase modulator in closed-loop optical voltage sensors[J].Optics & Laser Technology, 2013, 47(2013):214-220. http://adsabs.harvard.edu/abs/2013OptLT..47..214H [11] 潘雄, 张春生, 王夏霄, 等.反馈延迟对光纤陀螺振动误差特性的影响[J].红外与激光工程, 2014, 43(8):2607-2612. http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201408035.htmPAN X, ZHANG C S, WANG X X, et al.Impact on vibration error characteristics of FOG with feedback delay[J].Infrared and Laser Engineering, 2014, 43(8):2607-2612(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201408035.htm [12] BIELAS M S.Stochastic and dynamic modeling of fiber gyros[C]//Fiber Optic and Laser Sensors Ⅻ.Bellingham, WA:SPIE, 1994, 2292:240-254. [13] ZHANG Y G, GAO Z X, WANG G C, et al.Modeling and simulation of the second feedback loop for fiber optic gyroscope[C]//International Symposium on Photoelectronic Detection and Imaging 2013:Fiber Optic Sensors and Optical Coherence Tomography.Bellingham, WA:SPIE, 2013, 8914:1-7. [14] 国防科学技术工业委员会. 光纤陀螺仪测试方法: GJB 2426A-2004[S]. 北京: 国防科工委军标出版发行部, 2004. http://www.doc88.com/p-3899720358953.htmlNational Defense Science and Technology Industry Committee.Test methods for fiber optic gyroscope:GJB 2426A-2004[S].Beijing:National Defense Science and Engineering Commission Military Standard Publishing Department, 2004(in Chinese). http://www.doc88.com/p-3899720358953.html [15] PAVLATH G A.Closed-loop fiber optic gyros[C]//Fiber Optic Gyros:20th Anniversary Conference.Bellingham, WA:SPIE, 1996, 2837:46-60. [16] 余涛, 卿立, 吴衍记.光纤陀螺仪死区的原因分析及误差补偿[J].中国惯性技术学报, 2007, 15(3):363-365. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ200703025.htmYU T, QING L, WU Y J.FOG deadband reason analysis and error compensation[J].Journal of Chinese Inertial Technology, 2007, 15(3):363-365(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ200703025.htm [17] CHONG K H, CHONG K T, KIM Y C.Amplitude control of phase modulation for dithered closed-loop fiber optic gyroscope[J].Journal of the Optical Society of Korea, 2012, 16(4):401-408. doi: 10.3807/JOSK.2012.16.4.401 [18] 王巍, 付铁刚.数字闭环光纤陀螺死区机理分析[J].中国惯性技术学报, 2007, 15(1):105-107. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ200701026.htmWANG W, FU T G.Analysis on dead-band mechanism of digital closed-loop FOG[J].Journal of Chinese Inertial Technology, 2007, 15(1):105-107(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ200701026.htm -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 757
- HTML全文浏览量: 118
- PDF下载量: 600
- 被引次数: 0
