



-
摘要:
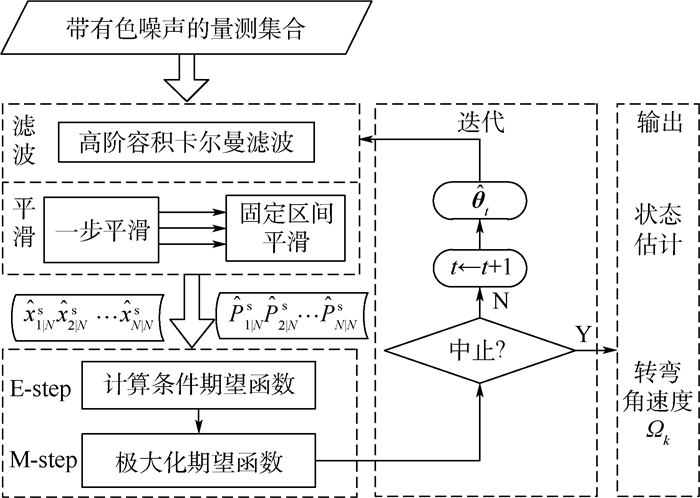
针对有色量测噪声背景下战斗机蛇形机动模式转弯角速度辨识问题,考虑到目标状态与转弯角速度之间相互耦合的特性,基于期望最大化(EM)算法框架,提出了一种带有色量测噪声的联合估计与辨识算法。通过采用量测差分法实现了有色噪声白化,从而将有色量测噪声背景下的转弯角速度辨识问题转换成具有一步状态延迟的转弯角速度辨识问题。基于EM算法实现了战斗机蛇形机动目标状态与转弯角速度的联合估计与辨识:在E-step,通过利用有色量测噪声背景下的高阶容积卡尔曼平滑(HCKS)算法,获得了目标状态的后验估计;在M-step,通过极大化条件似然函数,进而获得转弯角速度的解析解。通过仿真验证了本文算法的目标状态估计与角速度辨识的精度均优越于传统的扩维法以及交互多模型法。而且又从窗口长度以及最大迭代次数2个方面评估分析了算法的性能,仿真结果表明,窗口长度以及最大迭代次数越大,精度越高。
Abstract:Motivated by identifying the turn rate of fighter zigzag maneuver under the background of colored measurement noise, the joint estimation and identification algorithm with colored measurement noise is proposed based on expectation maximization (EM) algorithm by considering the characteristics of the coupling between the target state and the turn rate. The colored noise whitening is realized by using the measurement difference scheme, and thus, the turn rate identification problem with colored measurement noise is transformed into the turn rate identification problem with one-step delayed state. The joint estimation and identification of both fighter zigzag maneuver target states and turn rate are achieved by EM algorithm:in the E-step, the target state posteriori estimation is achieved accurately using the high-degree cubature Kalman smoothers (HCKS) algorithm with colored measurement noise; in the M-step, the analytical identification result of turn rate is obtained by maximizing the conditional likelihood function. It is verified in the final simulation that the proposed algorithm performs better in terms of target state estimation and turn rate identification accuracy than the traditional augmentation method and interacting multi-model algorithm. Furthermore, the performance of the proposed algorithm is evaluated and analyzed from two aspects of window length and maximum number of iterations. The simulation results show that the larger the window length and the maximum number of iterations are, the higher the precision is.
-

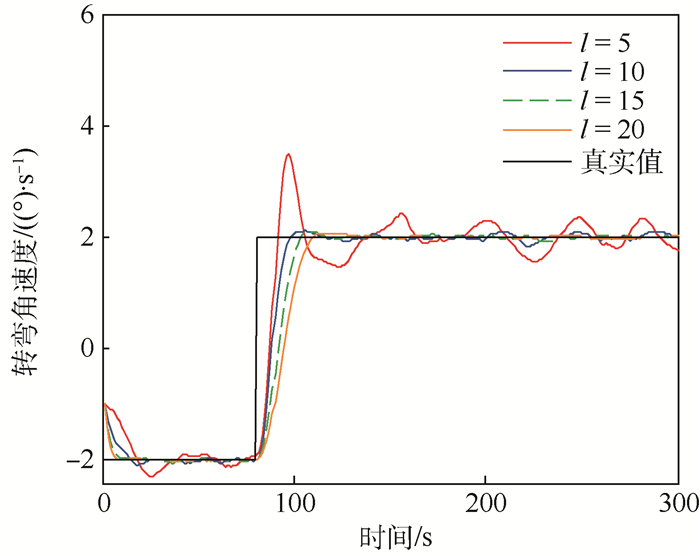
图 2 不同窗口长度下转弯角速度辨识结果
Figure 2. Turn rate identification results with different window lengths

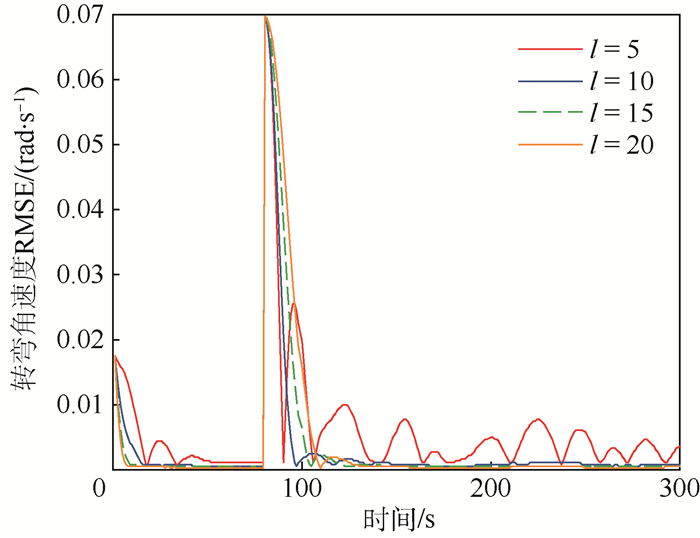
图 3 不同窗口长度下转弯角速度辨识的均方根误差
Figure 3. RMSE of turn rate identification with different window lengths

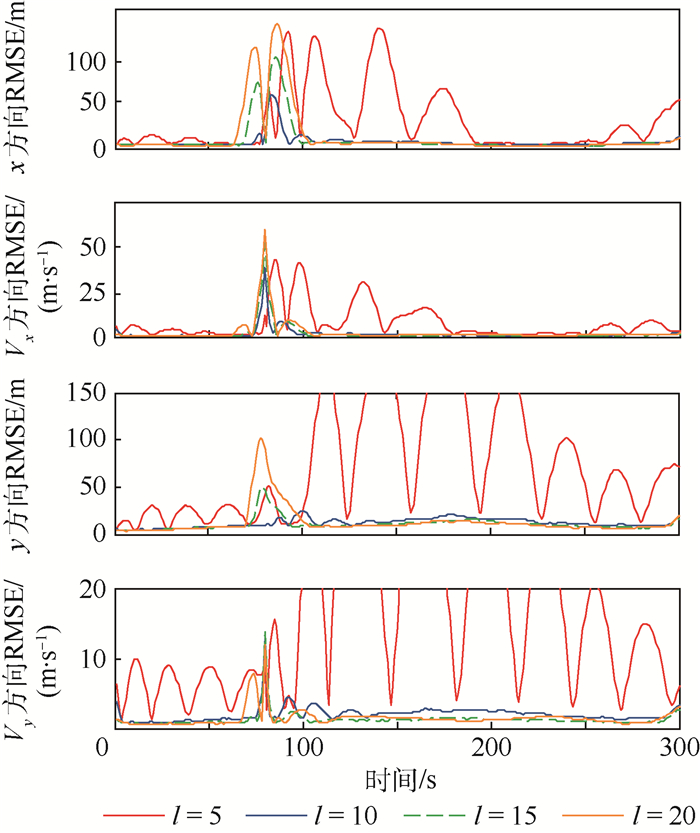
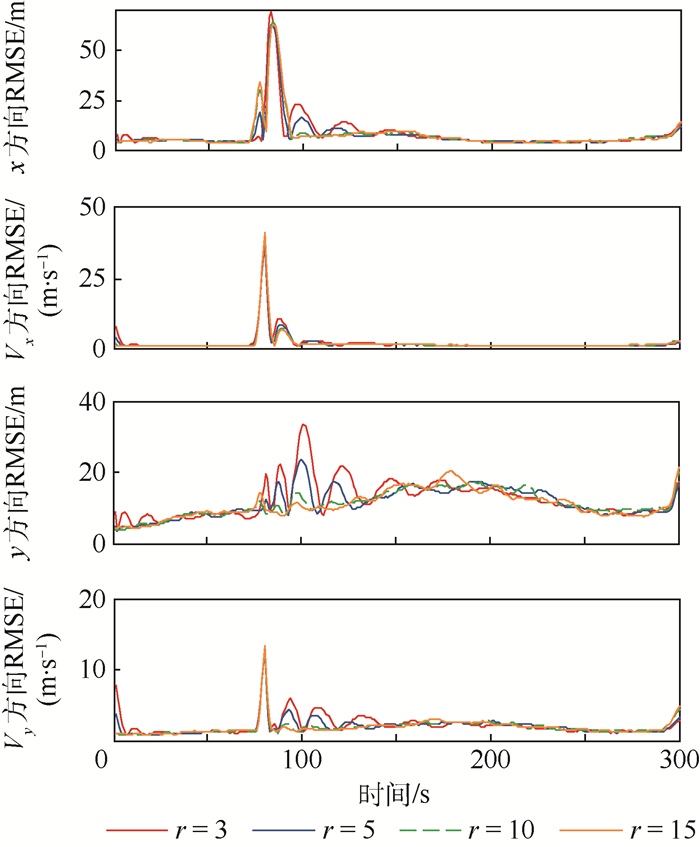
图 4 不同窗口长度下位置和速度估计均方根误差
Figure 4. RMSE of position and velocity estimation with different window lengths

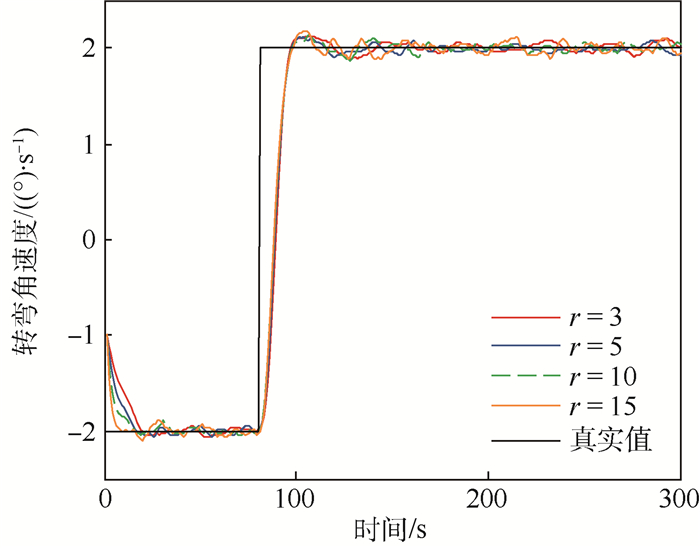
图 5 不同最大迭代次数下转弯角速度辨识结果
Figure 5. Turn rate identification result with different numbers of maximum iterations

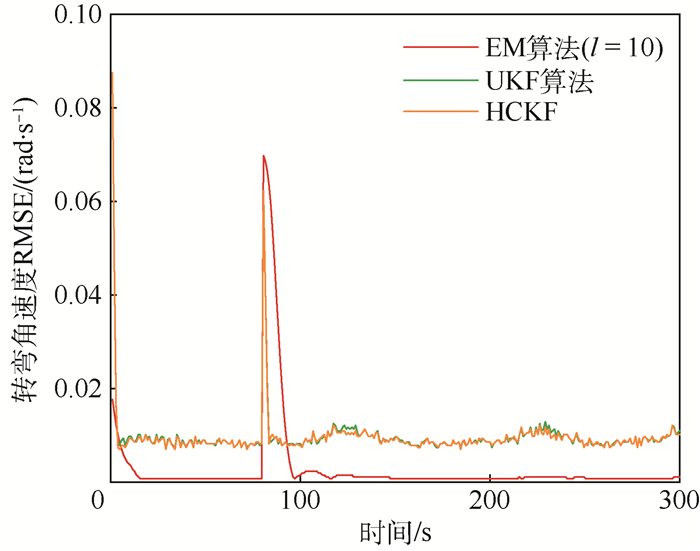
图 6 不同迭代次数下转弯角速度辨识的均方根误差
Figure 6. RMSE of turn rate identification with different numbers of iterations

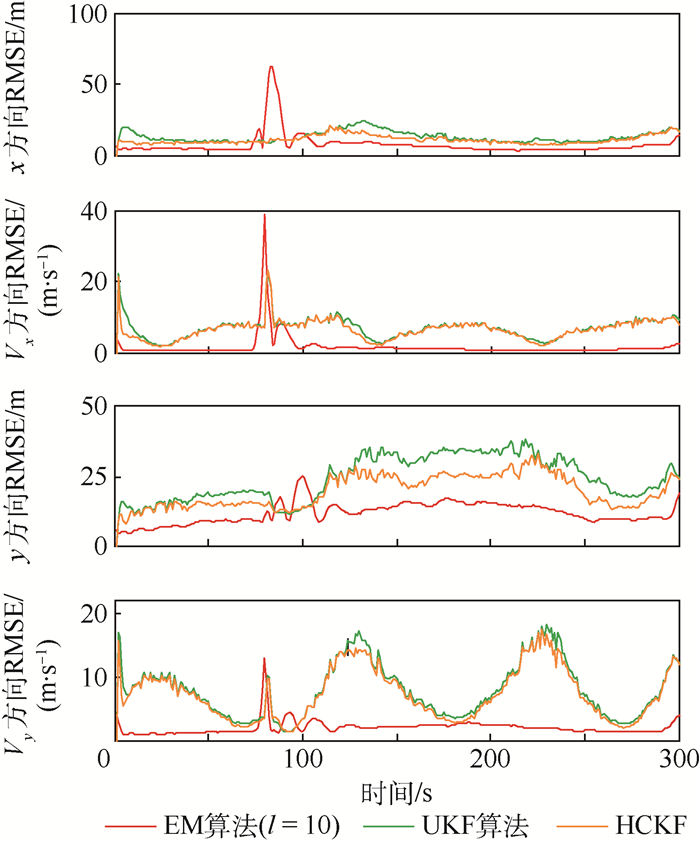
图 7 不同迭代次数下位置和速度估计均方根误差
Figure 7. RMSE of position and velocity estimation with different numbers of iterations
表 1 k=50 s时的角速度和状态所耗费的时间
Table 1. Turn rate and state calculation time when k=50 s
滑动窗口长度 时间/s 5 0.046 5 10 0.104 8 15 0.122 2 20 0.164 9  下载: 导出CSV
下载: 导出CSV
表 2 k=120 s时的角速度和状态所耗费的时间
Table 2. Turn rate and state calculation time when k=120 s
最大迭代次数 时间/s 3 0.049 5 5 0.082 7 10 0.159 9 15 0.257 7
下载: 导出CSV
-
[1] 宋华, 章新华, 许林周.基于离散隐马尔科夫模型的空中目标战术机动识别[J].仪器仪表学报, 2007, 28(4):588-592. http://d.old.wanfangdata.com.cn/Conference/6419027SONG H, ZHANG X H, XU L Z.Aerial combat maneuver identification based on discrete hidden Markov model[J].Chinese Journal of Scientific Instrument, 2007, 28(4):588-592(in Chinese). http://d.old.wanfangdata.com.cn/Conference/6419027 [2] 钟友武, 柳嘉润, 申功璋.自主近距空战中敌机的战术动作识别方法[J].北京航空航天大学学报, 2007, 33(9):1056-1059. doi: 10.3969/j.issn.1001-5965.2007.09.013ZHONG Y W, LIU J R, SHEN G Z.Recognition method for tactica maneuver of target in autonomous close-in air combat[J].Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(9):1056-1059(in Chinese). doi: 10.3969/j.issn.1001-5965.2007.09.013 [3] ROTH M, HENDEBY G, GUSTAFSSON F.EKF/UKF maneuvering target tracking using coordinatd turn models with polar/Cartesian velocity[C]//17th International Conference on Information Fusion (FUSION).Piscataway, NJ: IEEE Press, 2014: 1-8. [4] ARASARATNAM I, HAYKIN S.Cubature Kalman smoother[J].Automatica, 2011, 47(10):2245-2250. doi: 10.1016/j.automatica.2011.08.005 [5] JIA B, XIN M, CHENG Y.High-degree cubature Kalman filter[J].Automatica, 2013, 49(2):510-518. doi: 10.1016/j.automatica.2012.11.014 [6] 黄伟平, 徐毓, 王杰.基于改进"当前"统计模型的转弯机动跟踪算法[J].控制与决策, 2011, 26(9):1412-1416. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201109026HUANG W P, XU Y, WANG J.Algorithm based on modified current statistic mode fo turn maneuver[J].Control and Decision, 2011, 26(9):1412-1416(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201109026 [7] SONG B, WANG X X, LIANG Y, et al.Analytical identification of system parameter nonlinearly coupled in dynamic transition matrix[C]//American Control Conference(ACC).2016: 1832-1837. [8] 王小旭, 梁彦, 潘泉, 等.带有色量测噪声的非线性系统Unscented卡尔曼滤波器[J].自动化学报, 2012, 38(6):986-998. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201201784778WANG X X, LIANG Y, PAN Q, et al.Unscented Kalman filter for nonlinear systems with colored measurement noise[J].Acta Automatica Sinica, 2012, 38(6):986-998(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201201784778 [9] WANG X X, LIANG Y, PAN Q, et al.Nonlinear Gaussian smoothers with colored measurement noise[J].IEEE Trasactions on Automatic Control, 2015, 60(3):870-876. doi: 10.1109/TAC.2014.2337991 [10] 黄玉龙, 张勇刚, 李宁, 等.一种带有色量测噪声的非线性系统辨识方法[J].自动化学报, 2015, 41(11):1877-1892. http://d.old.wanfangdata.com.cn/Periodical/zdhxb201511005HUANG Y L, ZHANG Y G, LI N, et al.An identification method for nonlinear systems with colored measurement noise[J].Acta Automatica Sinica, 2015, 41(11):1877-1892(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zdhxb201511005 [11] WANG X X, LIANG Y, PAN Q, et al.Nonlinear Gaussian smoothers with colored measurements noise[J].IEEE Transactions on Automatic Control, 2015, 60(3):870-876. doi: 10.1109/TAC.2014.2337991 [12] NOBUHIRO Y.Parameter estimation of aircraft dynamics via unscented smoother with expectation-maximization algorithm[J].Journal of Guidance, Control, and Dynamics, 2011, 34(2):426-436. doi: 10.2514/1.51696 [13] LAN H, LIANG Y, YANG F, et al.Joint estimation and identification for stochastic systems with unknown inputs[J].IET Control Theory & Appications, 2013, 7(10):1377-1386. https://ieeexplore.ieee.org/abstract/document/6584842 [14] SCHON T, WILLS A, NINNESS B.System identification of nonlinear state-space models[J].Automatica, 2011, 47(1):39-49. doi: 10.1016/j.automatica.2010.10.013 [15] HUANG Y, ZHANG Y G, LI N, et al.Latency probability estimation of non-linear systems with one-step randomly delayed measurements[J].IET Control Theory & Appications, 2016, 10(7):843-852. doi: 10.1049/iet-cta.2015.1092 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 622
- HTML全文浏览量: 70
- PDF下载量: 437
- 被引次数: 0
