



Dynamics modeling and kinematics calculation of webbed-feet during cormorant's take-off
-
摘要:
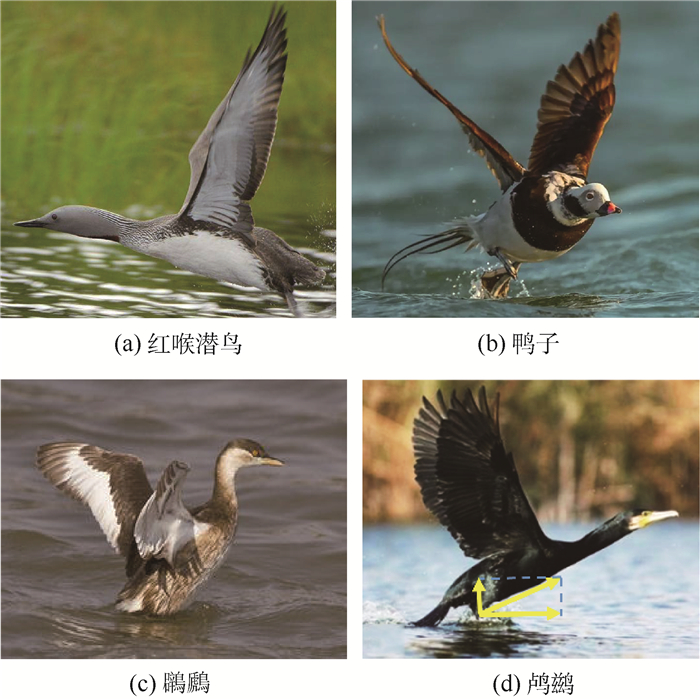
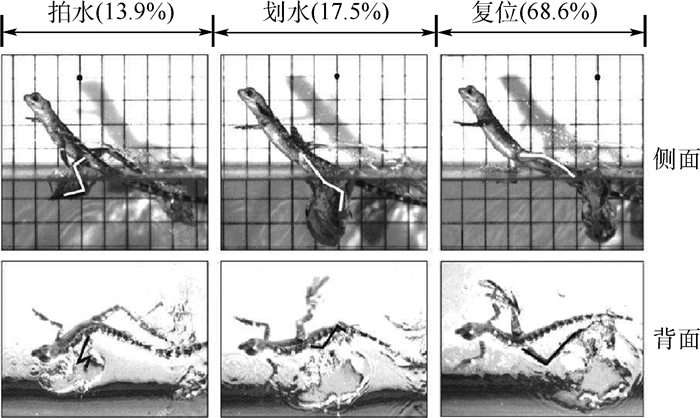
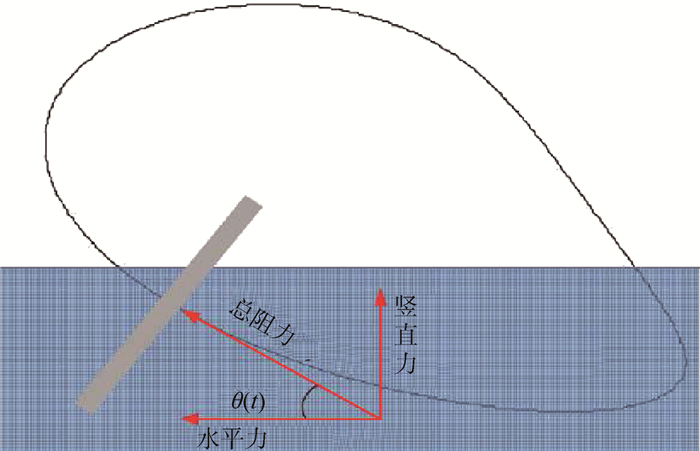
鸬鹚在水面起飞的过程中,进行周期性扑翼运动的同时,其脚蹼也不断进行周期性拍水运动。为探究脚蹼周期性拍击水面对鸬鹚水面起飞的贡献以及定量计算每个拍水周期中脚蹼力的大小,探讨了鸬鹚起飞过程中后肢力量的贡献以及需要腿部力量辅助的原因;同时,比较自然界生物在水面行走或奔跑方式的异同,从而研究鸬鹚等水栖鸟类在水面上连续拍水的机理。通过蛇怪蜥蜴和鸬鹚脚蹼水上运动模式和机理的对比,类比研究脚蹼对水面冲击而产生支持身体冲量的大小与脚蹼在拍水时与水接触变化的过程;定义鸬鹚腿部自由度,建立鸬鹚起飞过程脚蹼周期性拍水运动的运动学模型,分析腿部关节角度与脚蹼中心坐标的D-H矩阵,并研究关节角速度与脚蹼中心速度的雅可比矩阵,通过现有的视频分析验证模型可靠性,并对鸬鹚脚掌运动以及水平、竖直方向的运动做了基本计算。
Abstract:The process of taking off from the surface of water for cormorant is a combination of flapping its wings and its webbed-feet periodically. In order to look into the contribution of the latter that helps in taking off and to compute each period in fixed quantity of the amount of force in each flapping action, this article explores the contribution of hind limb power to the process of taking off as well as the reasons of the need of leg strength for assistance. At the same time, through introducing various types of water walking living creatures and looking at the differences and similarities in the ways that nature creatures walk or run on the water surface, the continuous flapping mechanism of cormorant and other aquatic birds on water surface is studied. Moreover, by comparing the different modes and mechanism of water movement of basilisk lizard and cormorant, an analogy is made to study the impulse generated by the webbed-feet which sustains the body as well as the changes of webbed-feet beating the water. With the DOF of cormorant's webbed-feet defined, the periodic flapping kinematics model during cormorant taking off is established. The D-H matrix of the leg joint angle and the webbed-feet center coordinates, as well as the Jacobian matrix of the joint angular velocity and the webbed-feet center speed are analyzed. Through the existing video analysis, the reliability of the model is verified, and the basic calculation is made for the movement of the cormorant's webbed-feet and the horizontal and vertical direction.
-


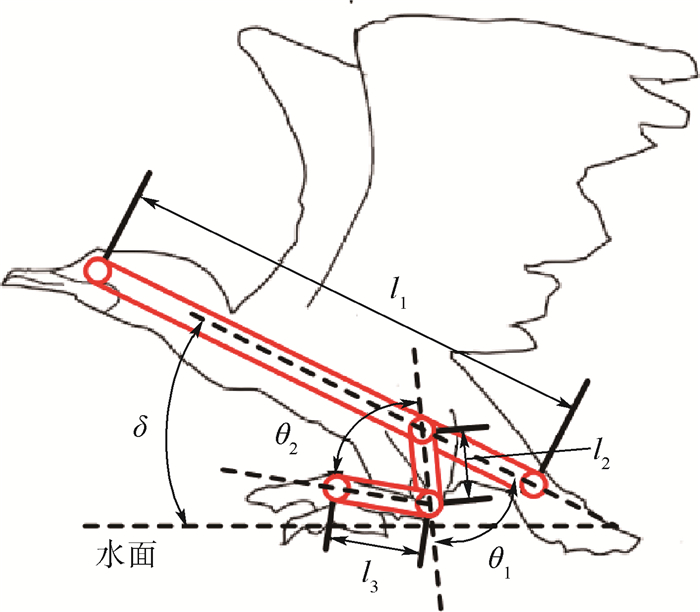
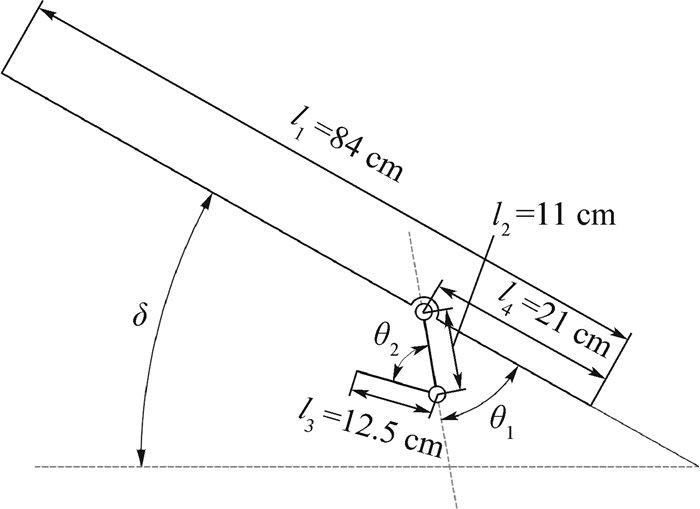
图 6 鸬鹚腿部关节角度及简化模型D-H坐标系
Figure 6. Cormorant's leg joint angle and simplified model D-H coordinate system

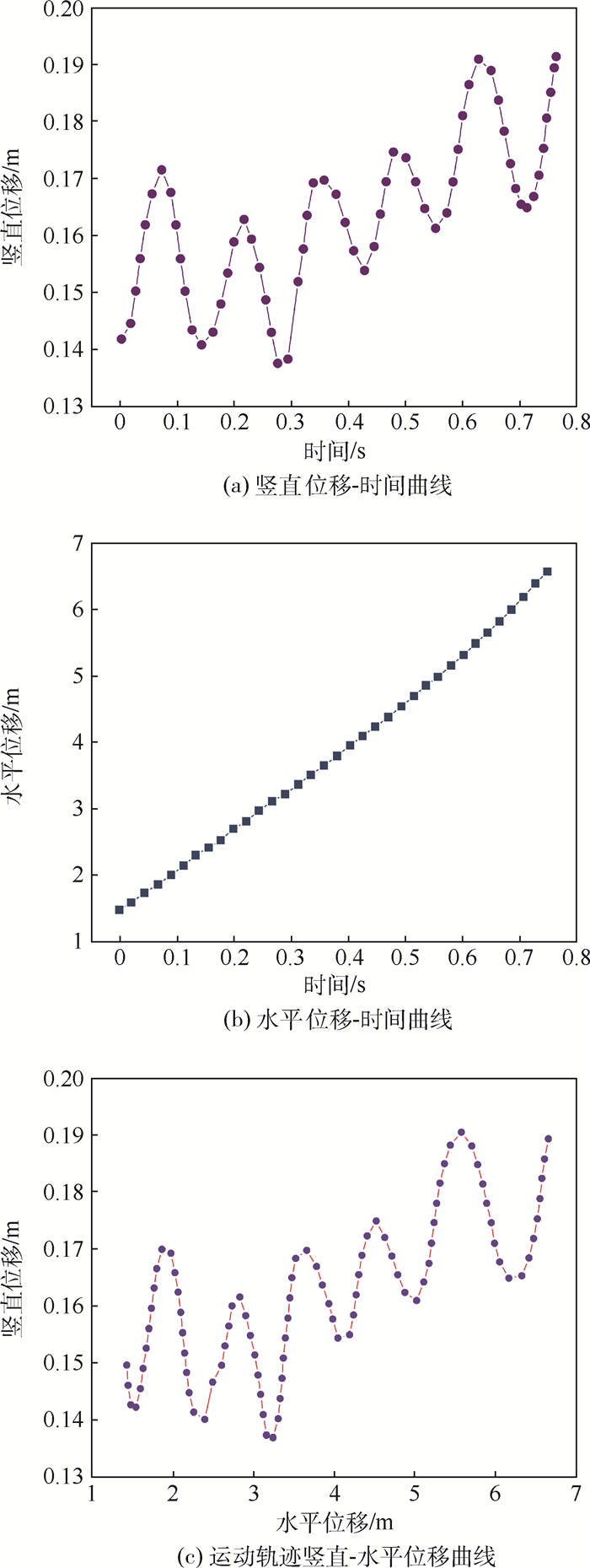
图 11 鸬鹚竖直、水平位移-时间曲线及运动轨迹竖直-水平位移曲线
Figure 11. Vertical, horizontal displacement-time curve and vertical-horizontal displacement curve of cormorant
表 1 D-H参数
Table 1. D-H parameters
序号 关节角θ 连杆偏距d 连杆长度a 连杆转角α 1 π+δ+θ1 0 D2 0 2 π-θ2 0 D3 0 注:序号1、2表示髋关节与膝关节的D-H转换关系。  下载: 导出CSV
下载: 导出CSV
表 2 关节角度测量值表示
Table 2. Expression of joint angle measurements
测量值 横坐标表示 纵坐标表示 A xA yA B xB yB C xC yC D xD yD E xE yE θ1 
θ2 
注:dot和norm在MATLAB中分别表示点乘和取模的函数。
下载: 导出CSV
表 4 竖直方向位移测量值表示
Table 4. Expression of vertical displacement measurement
测量值 横坐标表示 纵坐标表示 A xA yA M xM yM N xN yN Sv  下载: 导出CSV
下载: 导出CSV
表 5 水平方向位移测量值表示
Table 5. Expression of horizontal displacement measurement
测量值 横坐标表示 纵坐标表示 A xA yA X1 x1 y1 X2 x2 y2 Xn xN yN Sh  下载: 导出CSV
下载: 导出CSV
-
[1] YANG X, WANG T, LIANG J, et al. Survey on the novel hybrid aquatic-aerial amphibious aircraft:Aquatic unmanned aerial vehicle (AquaUAV)[J].Progress in Aerospace Sciences, 2015, 74:131-151. doi: 10.1016/j.paerosci.2014.12.005 [2] PADIAN K, CHIAPPE L M.The origin and early evolution of birds[J].Biological Reviews, 1998, 73(1):1-42. doi: 10.1017/S0006323197005100 [3] ALEXANDER R M N.Leg design and jumping technique for humans, other vertebrates and insects[J].Philosophical Transactions of the Royal Society of London B:Biological Sciences, 1995, 347(1321):235-248. doi: 10.1098/rstb.1995.0024 [4] EARLS K D.Kinematics and mechanics of ground take-off in the starling Sturnis vulgaris and the quail Coturnix coturnix[J].Journal of Experimental Biology, 2000, 203(4):725-739. http://cn.bing.com/academic/profile?id=11b33a987d8f4a88abbd24623425c7ad&encoded=0&v=paper_preview&mkt=zh-cn [5] PROVINI P, TOBALSKE B W, CRANDELL K E, et al.Transition from leg to wing forces during take-off in birds[J].Journal of Experimental Biology, 2012, 215(23):4115-4124. doi: 10.1242/jeb.074484 [6] CHEN M W, SUN M.Wing/body kinematics measurement and force and moment analyses of the takeoff flight of fruitflies[J].Acta Mechanica Sinica, 2014, 30(4):495-506. doi: 10.1007/s10409-014-0059-0 [7] NORBERG R Å, NORBERG U M.Take-off, landing, and flight speed during fishing flights of Gavia stellata (Pont.)[J].Ornis Scandinavica, 1971, 2(1):55-67. doi: 10.2307/3676239 [8] GOUGH W T, FARINA S C, FISH F E.Aquatic burst locomotion by hydroplaning and paddling in common eiders (Somateria mollissima)[J].Journal of Experimental Biology, 2015, 218(11):1632-1638. doi: 10.1242/jeb.114140 [9] XUE X, ZHAO X, HUANG J, et al.Experiments and analysis of cormorants' density, wing loading and webbed feet loading[C]//2016 IEEE International Conference on Robotics and Biomimetics (ROBIO).Piscataway, NJ: IEEE Press, 2016: 83-87. http://ieeexplore.ieee.org/document/7866302/ [10] CLIFTON G T, HEDRICK T L, BIEWENER A A.Western and Clark's grebes use novel strategies for running on water[J].Journal of Experimental Biology, 2015, 218(8):1235-1243. doi: 10.1242/jeb.118745 [11] GLASHEEN J W, MCMAHON T A.A hydrodynamic model of locomotion in the basilisk lizard[J].Nature, 1996, 380(6572):340-342. doi: 10.1038/380340a0 [12] BUSH J W M, HU D L.Walking on water:Biolocomotion at the interface[J].Annual Review of Fluid Mechanics, 2006, 38:339-369. doi: 10.1146/annurev.fluid.38.050304.092157 [13] HSIEH S T, LAUDER G V.Running on water:Three-dimensional force generation by basilisk lizards[J].Proceedings of the National Academy of Sciences of the United States of America, 2004, 101(48):16784-16788. doi: 10.1073/pnas.0405736101 [14] GLASHEEN J W, MCMAHON T A.Vertical water entry of disks at low Froude numbers[J].Physics of Fluids, 1996, 8(8):2078-2083. doi: 10.1063/1.869010 [15] HSIEH S T.Three-dimensional hindlimb kinematics of water running in the plumed basilisk lizard (Basiliscus plumifrons)[J].The Journal of Experimental Biology, 2003, 206(23):4363-4377. doi: 10.1242/jeb.00679 [16] FLOYD S, KEEGAN T, PALMISANO J, et al.A novel water running robot inspired by basilisk lizards[C]//2006 IEEE/RSJ International Conference on/Intelligent Robots and Systems.Piscataway, NJ: IEEE Press, 2006: 5430-5436. http://ieeexplore.ieee.org/document/4059292/ [17] WHITE F M.Fluid mechanics[M].4th ed.New York:McGraw-Hill, 1999. [18] Bunch of cormorants enjoying the lake water[EB/OL].(2016-09-24).https://www.youtube.com/watch?v=ULJKKoO-JNs. [19] 鸬鹚活动记录[EB/OL].(2015-12-05).https://www.youtube.com/watch?v=4Rgtf9xH7fs.Cormorant's activity record[EB/OL].(2015-12-05).https://www.youtube.com/watch?v=4Rgtf9xH7fs(in Chinese). [20] HUANG J, GONG X, WANG Z, et al.The kinematics analysis of webbed feet during cormorants' swimming[C]//2016 IEEE International Conference on Robotics and Biomimetics (ROBIO).Piscataway, NJ: IEEE Press, 2016: 301-306. [21] 蔡自兴.机器人学[M].北京:清华大学出版社, 2000.CAI Z X.Robotics[M].Beijing:Tsinghua University Press, 2000(in Chinese). -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 638
- HTML全文浏览量: 105
- PDF下载量: 403
- 被引次数: 0
