



-
摘要:
阻抗控制作为一种柔顺控制方式,能够实现力与位置的协同控制,在作动系统需要与外部环境发生接触的应用中具有一定优势。在集成、高效的电动静液作动器(EHA)上实现基于力的阻抗控制具有良好的应用前景,其中核心问题是EHA力伺服控制器的设计。针对阻抗控制中外部负载特性不确定,EHA部分结构参数时变等问题,采用定量反馈理论(QFT)的方法对力伺服控制器进行设计。在对EHA数学模型及参数进行分析的基础上,通过QFT方法将被控对象的不确定范围与系统性能设计指标相结合,并以定量的方式在Nichols图上形成边界,在使标称对象的开环频率特性曲线满足各边界约束条件的同时完成力伺服控制器的设计。通过不同外部负载条件下的力伺服控制实验以及静、动态阻抗控制实验对EHA的力伺服控制器与阻抗控制系统进行了验证。实验结果表明:通过QFT方法设计得到的力伺服控制器对外部环境具有较强的鲁棒性,从而确保了EHA阻抗控制的成功实现。
-
关键词:
- 阻抗控制 /
- 柔顺控制 /
- 电动静液作动器(EHA) /
- 力控制 /
- 鲁棒控制
Abstract:As a kind of compliance control method, impedance control can realize force and position coordination control. So it has obvious advantages in the applications that the actuating systems are required to interact with the environments. Because of high energy efficiency and compact structure, electro-hydrostatic actuator (EHA) with force based impedance control has an extensive prospect. The force controller of EHA is the foundation of the impedance control. Due to the uncertain external load characteristics in impedance control and the time-invariant parameters of EHA, the quantitative feedback theory (QFT) was employed to design the force controller. The mathematical model of EHA was analyzed first. Then the uncertainty range of the controlled plant was combined with the performance specifications of the system to quantitatively plot the boundaries on the Nichols chart. The open-loop frequency characteristic curve of the nominal element was adjusted to satisfy the limitations of boundaries and the force controller was completed simultaneously. The force control and static/dynamic impedance control experiments under various load characteristics were conducted to examine the efficacy of the system. The experimental results demonstrate that the force controller designed by QFT method has sufficient robustness and the impedance control of EHA is achieved successfully.
-

图 4 综合边界与系统开环频率响应
Figure 4. Integrated bounds and open-loop frequencyresponse of system

图 5 引入前置滤波器前后系统闭环频率响应
Figure 5. Closed-loop frequency responses of systemwith and without pre-filter

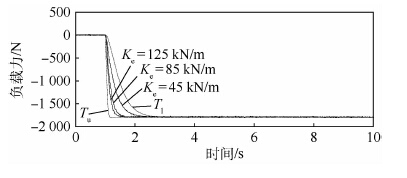
图 6 不同弹性负载刚度下EHA力控制系统阶跃响应
Figure 6. Step responses of EHA force control system withvarious elastic load stiffness
表 1 EHA模型定常参数
Table 1. Time-invariant parameters of EHA model
参数 数值 ML/kg 12.3 Tm/s 0.05 Km/(rad·s-1·V-1) 25 Vt/cm3 234 A/mm2 633 Dp/(cm3·r-1) 4.9  下载: 导出CSV
下载: 导出CSV
表 2 EHA模型时变参数
Table 2. Time-variant parameters of EHA model
参数 下限值 上限值 βe /(108N·m-2) 5 9 Kfv/(N·s·m-1) 50 350 Ke/(kN·m-1) 20 200
下载: 导出CSV
-
[1] HOGAN N.Impedance control:An approach to manipulation,Parts Ⅰ,Ⅱ,Ⅲ[J].Journal of Dynamic Systems,Measurement,and Control,1985,107(1):1-24. doi: 10.1115/1.3140702 [2] KAZEROONI H.Automated robotic deburring using impedance control[J].Control Systems Magazine,1988,8(1):21-25. doi: 10.1109/37.464 [3] ERHAN A G,MEHMET A A.The design and control of a therapeutic exercise robot for lower limb rehabilitation:Physiotherabot[J].Mechatronics,2011,21(3):509-522. doi: 10.1016/j.mechatronics.2011.01.005 [4] RICHARDSON R,BROWN M,BHAKTA B,et al.Design and control of a three degree of freedom pneumatic physiotherapy robot[J].Robotica,2003,21(6):589-604. doi: 10.1017/S0263574703005320 [5] OTT C,ALBU-SCHAFFER A,KUGI A,et al.On the passivity-based impedance control of flexible joint robots[J].IEEE Transactions on Robotics,2008,24(2):416-429. doi: 10.1109/TRO.2008.915438 [6] IRAWAN A,NONAMI K.Optimal impedance control based on body inertia for a hydraulically driven hexapod robot walking on uneven and extremely soft terrain[J].Journal of Field Robotics,2011,28(5):690-713. doi: 10.1002/rob.20404 [7] HA Q P,NGUYEN Q H,RYE D C,et al.Impedance control of a hydraulically actuated robotic excavator[J].Automation in Construction,2000,9(5):421-435. http://www.academia.edu/15381157/Impedance_control_of_a_hydraulically_actuated_robotic_excavator [8] TAFAZOLI S,SALCUDEAN S E,HASHTRUDI-ZAAD K,et al.Impedance control of a teleoperated excavator[J].IEEE Transactions on Control Systems Technology,2002,10(3):355-367. doi: 10.1109/87.998021 [9] FATEH M M,ALAVI S S.Impedance control of an active suspension system[J].Mechatronics,2009,19(1):134-140. doi: 10.1016/j.mechatronics.2008.05.005 [10] FATEH M M.Robust impedance control of a hydraulic suspension system[J].International Journal of Robust and Nonlinear Control,2010,20(8):858-872. https://www.researchgate.net/publication/229917780_Robust_impedance_control_of_a_hydraulic_suspension_system [11] FATEH M M,ZIRKOHI M M.Adaptive impedance control of a hydraulic suspension system using particle swarm optimization[J].Vehicle System Dynamics,2011,49(12):1951-1965. doi: 10.1080/00423114.2011.564289 [12] KAMINAGA H,ONO J,NAKASHIMA Y,et al.Development of backdrivable hydraulic joint mechanism for knee joint of humanoid robots[C]//Robotics and Automation.Piscataway,NJ:IEEE Press,2009:1577-1582. [13] KAMINAGA H, AMARI T,KATAYAMA Y,et al.Backdrivability analysis of electro-hydrostatic actuator and series dissipative actuation model[C]//Robotics and Automation.Piscataway,NJ:IEEE Press,2010:4204-4211. [14] KAMINAGA H,AMARI T,NIWA Y,et al.Development of knee power assist using backdrivable electro-hydrostatic actuator[C]//Intelligent Robots and Systems.Piscataway,NJ:IEEE Press,2010:5517-5524. [15] YANIV O.Quantitative feedback design of linear and nonlinear control systems[M].Massachusetts:Kluwer Academic Publishers,1999:17-18. [16] 马纪明,付永领,高波.基于定量反馈理论的EHA控制器设计[J].北京航空航天大学学报,2006,32(5):553-557. http://bhxb.buaa.edu.cn/CN/abstract/abstract9886.shtmlMA J M,FU Y L,GAO B.EHA controller design based quantitative feedback theory[J].Journal of Beijing University of Aeronautics and Astronautics,2006,32(5):553-557(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract9886.shtml [17] 郭彦青,付永领,张朋,等.电液负载模拟器摩擦参数辨识及补偿[J].北京航空航天大学学报,2014,40(9):1256-1262. http://bhxb.buaa.edu.cn/CN/abstract/abstract13029.shtmlGUO Y Q,FU Y L,ZHANG P,et al.Friction parameter identification and compensation for electro-hydraulic load simulator[J].Journal of Beijing University of Aeronautics and Astronautics,2014,40(9):1256-1262(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13029.shtml -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 834
- HTML全文浏览量: 78
- PDF下载量: 593
- 被引次数: 0
