



A collaborative localization algorithm based on non-line-of-sight error compensation
-
摘要:
非视距(NLOS)误差对超宽带(UWB)室内定位技术的定位精度有很大影响。针对此问题,根据NLOS环境下附加时延和由信道决定的均方根时延扩展的联合统计特性,估计NLOS误差的均值和方差,对定位算法测量值和系统测量误差协方差进行修正,并采用时变权重的粒子群算法与Chan算法相结合的协同定位算法进行定位计算,具有良好的全局搜索与局部搜索最优解的能力。仿真结果表明,在NLOS环境下,相比于单一算法,协同算法定位精度提高30%左右,在一定程度上抑制了NLOS误差的影响,满足室内定位的要求。
Abstract:The non-line-of-sight (NLOS) error has great influence on the positioning accuracy of the ultra-wideband (UWB) indoor positioning technology. Aimed at this problem, this paper estimates the mean and variance of NLOS according to the joint statistical properties of the additional time delay in NLOS and the root mean square delay spread decided by the channel, modifies the measurements of the localization algorithm and the covariance of the systematic measurement error, and uses a collaborative localization algorithm, which combines the particle swarm optimization algorithm with time-varying weight and Chan algorithm and has a favorable ability of global search and local search for optimal solutions. The simulation result shows that the collaborative algorithm improves the positioning accuracy by about 30%, compared to a single algorithm. It, to a certain extent, inhibits the effect of NLOS error, and meets the requirements of indoor location.
-

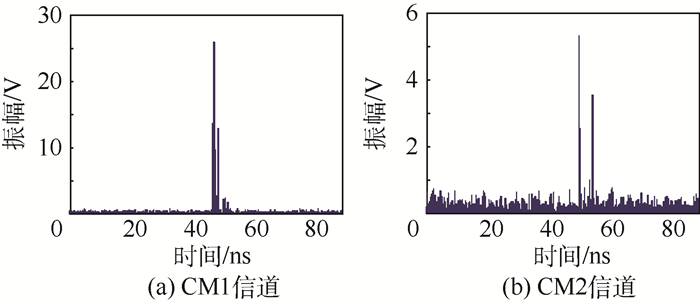
图 3 CM1信道和CM2信道基于脉冲序列最大能量到达时间测距算法的能量块图
Figure 3. Energy block diagram of maximum energy arrival time ranging algorithm based on pulse sequence of CM1 channel and CM2 channel

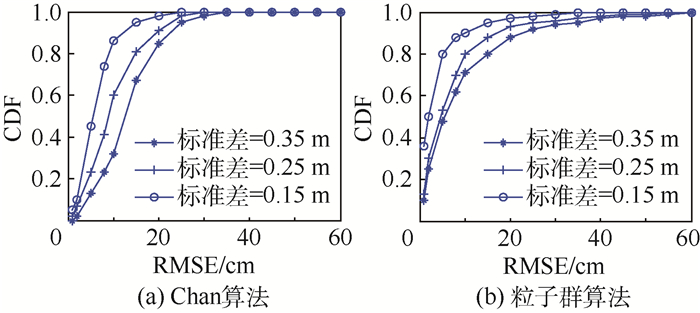
图 5 Chan算法和粒子群算法在系统测量误差不同时的定位性能对比
Figure 5. Comparison of positioning performance between Chan algorithm and particle swarm algorithm with different system measurement errors

图 6 Chan算法和粒子群算法在LOS环境与NLOS环境定位性能的对比
Figure 6. Comparison of positioning performance in LOS and NLOS environment between Chan algorithm and particle swarm algorithm

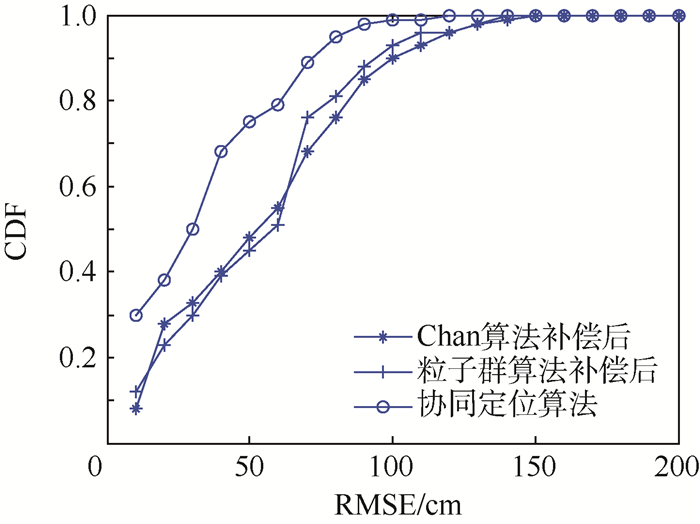
图 7 Chan算法和粒子群算法NLOS误差补偿后和协同定位算法之间的定位性能对比
Figure 7. Comparison of positioning performance among Chan algorithm after NLOS error compensation, particle swarm algorithm after NLOS error compensation, and collaborative localization algorithm
-
[1] TARZIA S P, DINDA P A, DICK R P, et al.Indoor localization without infrastructure using the acoustic background spectrum[C]//Proceedings of the 9th International Conference on Mobile Systems, Applications, and Services.New York:ACM, 2011:155-168. [2] CIURANA M, BARCELO A F, MARTIN E I.Comparative performance evaluation of IEEE 802.11v for positioning with time of arrival[J].Computer Standards & Interfaces, 2011, 33(3):344-349. http://www.citeulike.org/article/7960367 [3] IMMOREEV I Y.Ultrawideband radars:Features and capabilities[J].Journal of Communications Technology and Electrnics, 2009, 54(1):1-26. doi: 10.1134/S106422690901001X [4] LI C, ZHUANG W H.Hybrid TDOA/AOA mobile user location for wideband CDMA cellular systems[J].IEEE Transactions on Wireless Communications, 2002, 1(3):439-447. doi: 10.1109/TWC.2002.800542 [5] SILVENTOINEN M I, RANTALAINEN T.Mobile station emergency locating in GSM[C]//Proceedings of the 1996 IEEE International Conference on Personal Wireless Communications.Piscataway, NJ:IEEE Press, 1996:232-238. [6] DAMIEN B, DAVIDE D.Position error bound for UWB location in dense cluttered environments[J].IEEE Transactions on Aerospace and Electronic Systems, 1998, 44(2):613-615. https://www.researchgate.net/publication/3007692_Position_Error_Bound_for_UWB_Localization_in_Dense_Cluttered_Environments [7] 张宴龙, 陈卫东, 陈畅.基于非视距鉴别的室内移动节点跟踪算法[J].中国科学技术大学学报, 2014, 44(10):828-834. doi: 10.3969/j.issn.0253-2778.2014.10.005ZHANG Y L, CHEN W D, CHEN C.Mobile location tracking based on NLOS identification in indoor environments[J].Journal of University of Science and Technology of China, 2014, 44(10):828-834(in Chinese). doi: 10.3969/j.issn.0253-2778.2014.10.005 [8] WYLIE M P, HOLTZMAN J.Non-line of sight problem in mobile location estimation[C]//1996 5th IEEE International Conference on Universal Personal Communications.Piscataway, NJ:IEEE Press, 1996, 2:827-831. [9] CHEN P C.A non-line-of-sight error mitigation algorithm in location estimation[C]//1999 IEEE Wireless Communications and Networking Conference.Piscataway, NJ:IEEE Press, 1999, 1:316-320. [10] 王洪雁, 兰云飞, 裴炳南, 等.非视距环境下基于到达时间差的一种定位算法[J].计算机仿真, 2007, 24(9):116-119. http://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ200709032.htmWANG H Y, LAN Y F, PEI B N, et al.A location algorithm based on time difference of arrival in the non-line-of-sight environment[J].Journal of Computer Simulation, 2007, 24(9):116-119(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ200709032.htm [11] MOLISCH A F, BALAKRISHNAN K, CHONG C C, et al.IEEE 802.15.4a channel model-final report[J].IEEE P802, 2004, 15(4):0662. http://www.ieee802.org/15/pub/04/15-04-0662-02-004a-channel-model-final-report-r1.pdf [12] 段凯宇, 张力军.一种在NLOS环境下提高精度的TDOA定位方法[J].南京邮电学院学报, 2005, 25(5):15-19. http://www.cnki.com.cn/Article/CJFDTOTAL-NJYD200505003.htmDUAN K Y, ZHANG L J.An accuracy improved location method based on TDOA in NLOS environment[J].Journal of Nanjing College of Posts and Telecommunications, 2005, 25(5):15-19(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-NJYD200505003.htm [13] LIN L X, SO H C, CHAN F K W, et al.A new constrained weighted least squares algorithm for TDOA-based localization[J].Signal Processing, 2013, 93(11):2872-2878. doi: 10.1016/j.sigpro.2013.04.004 [14] CHAN Y T, HO K C.A simple and efficient estimator for hyperbolic location[J].IEEE Transactions on Signal Processing, 1994, 42(8):1905-1915. doi: 10.1109/78.301830 [15] POLI R, KENNEDY J, BLACKWELL T.Particle swarm optimization[J].Swarm Intelligence, 2007, 1(1):33-57. doi: 10.1007/s11721-007-0002-0 [16] KULKARNI R V, VENAYAGAMOORTHY G K.Particle swarm optimization in wireless-sensor networks:A brief survey[J].IEEE Transactions on Systems, Man, and Cybernetics, Part C:Applications and Reviews, 2011, 41(2):262-267. doi: 10.1109/TSMCC.2010.2054080 [17] BATRA A, BALAKRISHNAN J, AIELLO G R, et al.Design of a multiband OFDM system for realistic UWB channel environments[J].IEEE Transactions on Microwave Theory and Techniques, 2004, 52(9):2123-2138. doi: 10.1109/TMTT.2004.834184 [18] MOLISCH A F, FOERSTER J R, PENDERGRASS M.Channel models for ultrawideband personal area networks[J].IEEE Wireless Communications, 2003, 10(6):14-21. doi: 10.1109/MWC.2003.1265848 [19] GREENSTEIN L J, ERCEG V, YEH Y S, et al.A new path-gain/delay-spread propagation model for digital cellular channels[J].IEEE Transactions on Vehicular Technology, 1997, 46(2):477-485. doi: 10.1109/25.580786 [20] 杨北亚, 熊辉, 丁宏, 等.应用NLOS鉴别补偿的无线传感器网络TDOA定位算法[J].重庆理工大学学报, 2015, 29(10):120-126. doi: 10.3969/j.issn.1674-8425(z).2015.10.022YANG B Y, XIONG H, DING H, et al.TDOA location algorithm based on NLOS error identification and compensation in wireless sensor network[J].Journal of Chongqing University of Technology, 2015, 29(10):120-126(in Chinese). doi: 10.3969/j.issn.1674-8425(z).2015.10.022 [21] ALAVI B, PAHLAVAN K.Modeling of the TOA-based distance measurement error using UWB indoor radio measurements[J].IEEE Communications Letters, 2006, 10(4):275-277. doi: 10.1109/LCOMM.2006.1613745 [22] 刘金琨, 沈晓蓉, 赵龙.系统辨识理论及MATLAB仿真[M].北京:电子工业出版社, 2014:215-227.LIU J K, SHEN X R, ZHAO L.System identification theory and MATLAB simulation[M].Beijing:Publishing House of Electronics Industry, 2014:215-227(in Chinese). -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 930
- HTML全文浏览量: 73
- PDF下载量: 451
- 被引次数: 0
