



Formation reconfiguration control of quadrotor UAVs based on adaptive communication topology
-
摘要:
针对四旋翼无人机编队重构协同控制问题,基于切换通信拓扑结构的积分滑模控制(ISMC)方法进行了研究。根据四旋翼无人机间的通信拓扑关系以及编队重构特性,建立了四旋翼无人机编队模型。针对编队重构过程中可能出现的通信可靠性问题,提出了通信拓扑切换条件,结合积分滑模控制理论对切换通信拓扑条件下的协同控制器进行设计,并结合切换系统理论对编队系统稳定性进行了证明。仿真结果表明,无人机编队系统在编队重构过程中采用切换通信拓扑结构以及滑模控制方法能保证系统的稳定性,验证了方法的有效性。
Abstract:This paper focuses on the cooperative control problem in formation reconfiguration of multiple flight vehicles, and the method of integral sliding mode control (ISMC) based on switching communication topology is investigated. The multiple flight vehicle system is modeled involving the connecting of communication topology and the character of formation reconfiguration of quadrotor UAV. The switching condition of the communication topology is raised considering the possible communication reliability problem in the process of formation reconfiguration. The cooperative controller is designed by ISMC method under the condition of switching topology communication, and its stability is proved adopting switching system theory. The simulation results show that the stability of UAV formation system can be ensured with ISMC method and switching communication topology in the process of formation reconfiguration, and illustrate the effectiveness of the proposed method.
-
Key words:
- flight formation control /
- directed topology /
- adaptive /
- switching system /
- integral sliding mode /
- quadrotor UAV
-

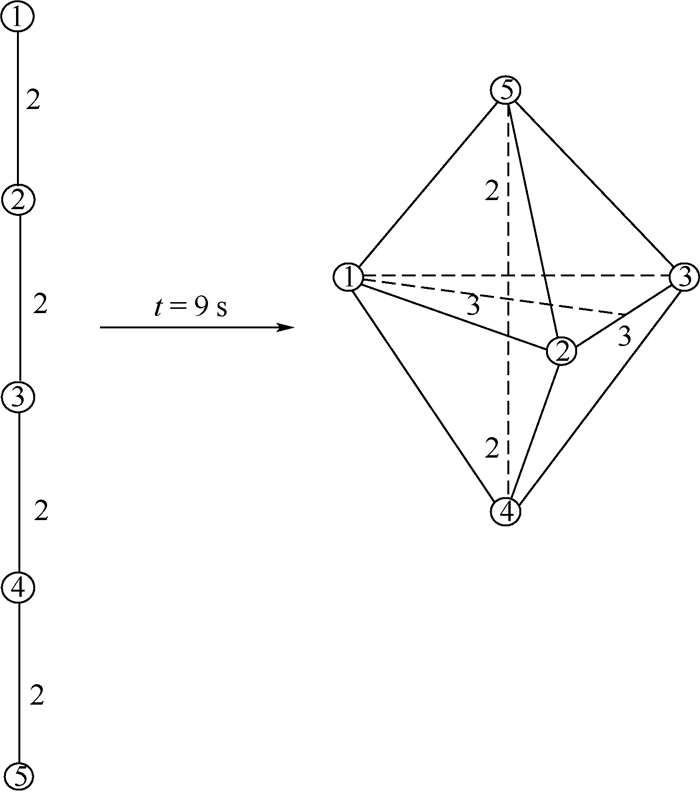
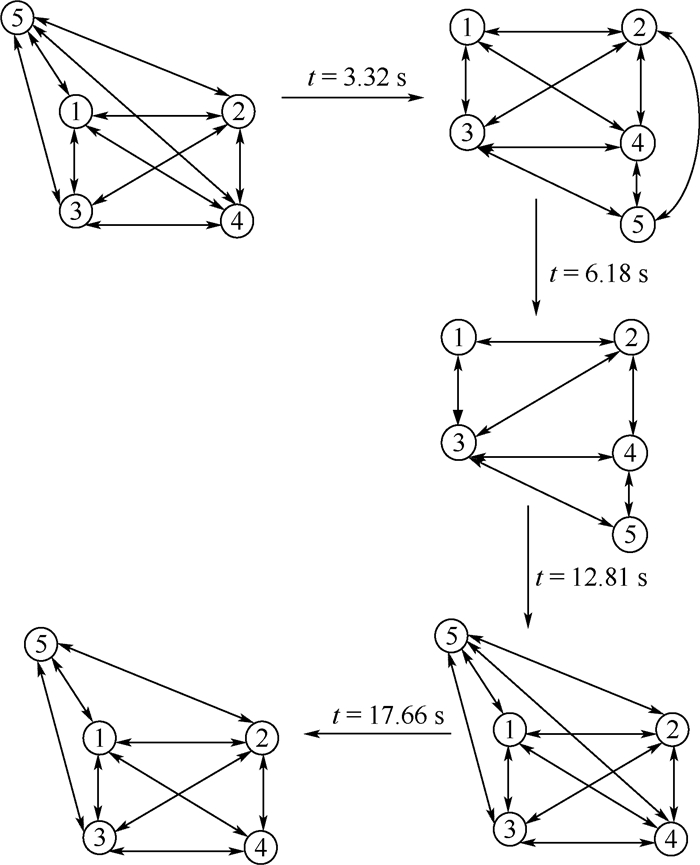
图 4 四旋翼无人机编队重构仿真结果
Figure 4. Reconfiguration simulation results of quadrotor UAV formation
表 1 无人机初始状态
Table 1. Initial conditions of UAV
无人机编号 位置/m 速度/(m·s-1) 1 [3, 1, 50] [-0.1, 0, 1] 2 [-1, 3, 50] [-0.3, -0.1, 1] 3 [2, -1, 50] [-0.1, -0.1, 1] 4 [1, 1, 50] [-0.1, 0, 1] 5 [0, 0, 52] [0, -0.1, 0]  下载: 导出CSV
下载: 导出CSV
表 2 有向拓扑权重
Table 2. Weight of directed topology
无人机编号 1 2 3 4 5 1 0.77 0.56 0.69 0.27 2 0.78 0.74 0.66 0.53 3 0.63 0.75 0.73 0.62 4 0.55 0.68 0.80 0.82 5 0.31 0.49 0.61 0.74
下载: 导出CSV
-
[1] 闵海波, 刘源, 王仕成, 等.多个体协调控制问题综述[J].自动化学报, 2012, 38(10):1558-1570. https://www.researchgate.net/profile/Haibo_Min/publication/257527945_minhaibo_liuyuan_wangshicheng_deng_duogetixiediaokongzhiwentizongshuJ_zidonghuaxuebao_2012_38010_1557-1570/links/0deec525746c72485e000000/minhaibo-liuyuan-wangshicheng-deng-duogetixiediaokongzhiwentizongshuJ-zidonghuaxuebao-2012-38010-1557-1570.pdfMIN H B, LIU Y, WANG S C, et al.An overview on coordination control problem of multi-agent system[J].Acta Automatica Sinica, 2012, 38(10):1558-1570(in Chinese). https://www.researchgate.net/profile/Haibo_Min/publication/257527945_minhaibo_liuyuan_wangshicheng_deng_duogetixiediaokongzhiwentizongshuJ_zidonghuaxuebao_2012_38010_1557-1570/links/0deec525746c72485e000000/minhaibo-liuyuan-wangshicheng-deng-duogetixiediaokongzhiwentizongshuJ-zidonghuaxuebao-2012-38010-1557-1570.pdf [2] 关永强, 纪志坚, 张霖, 等.多智能体系统能控性研究进展[J].控制理论与应用, 2015, 32(4):421-431. http://www.oalib.com/paper/4749161GUAN Y Q, JI Z J, ZHANG L, et al.Recent developments on controllability of multi-agent systems[J].Control Theory & Applications, 2015, 32(4):421-431(in Chinese). http://www.oalib.com/paper/4749161 [3] 樊琼剑, 杨忠, 方挺, 等.多无人机协同编队飞行控制研究现状[J].航空学报, 2009, 30(4):683-691. https://www.cnki.com.cn/qikan-HEBX201703001.htmlFAN Q J, YANG Z, FANG T, et al l.Research status of coordinated formation flight control for multi-UAVs[J].Acta Aeronautica et Astronautica Sinica, 2009, 30(4):683-691(in Chinese). https://www.cnki.com.cn/qikan-HEBX201703001.html [4] OH K K, PARK M C, AHN H S.A survey of multi-agent formation control[J].Automatica, 2015, 53:424-440. doi: 10.1016/j.automatica.2014.10.022 [5] 周绍磊, 康宇航, 史贤俊, 等.基于RQPSO-DMPC的多无人机编队自主重构方法[J].北京航空航天大学学报, 2017, 43(10):1960-1971. http://bhxb.buaa.edu.cn/CN/abstract/abstract14165.shtmlZHOU S L, KANG Y H, SHI X J, et al.Autonomous reconfiguration control method for multi-UAVs formation based on RQPSO-DMPC[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10):1960-1971(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14165.shtml [6] 马鸣宇, 董朝阳, 王青, 等.基于事件驱动的多飞行器编队协同控制[J].北京航空航天大学学报, 2017, 43(3):506-515. http://bhxb.buaa.edu.cn/CN/abstract/abstract14045.shtmlMA M Y, DONG C Y, WANG Q, et al.Event-based cooperative control of multiple fight vehicles formation[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(3):506-515(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14045.shtml [7] 刘跃峰, 张安.有人机/无人机编队协同任务分配方法[J].系统工程与电子技术, 2010, 32(3):584-588. https://www.wenkuxiazai.com/doc/d8692277eefdc8d376ee328b.htmlLIU Y F, ZHANG A.Cooperative task assignment method of manned/unmanned aerial vehicle formation[J].Systems Engineering and Electronics, 2010, 32(3):584-588(in Chinese). https://www.wenkuxiazai.com/doc/d8692277eefdc8d376ee328b.html [8] 李远. 多UAV协同任务资源分配与编队轨迹优化方法研究[D]. 长沙: 国防科技大学, 2011: 1-14. http://cn.bing.com/academic/profile?id=12046c8d5b7e8dbec4125ba5f962532b&encoded=0&v=paper_preview&mkt=zh-cnLI Y. Research on resources allocation and formation trajectories optimization for multiple UAVs cooperation mission[D]. Changsha: National University of Defense Technology, 2011: 1-14(in Chinese). http://cn.bing.com/academic/profile?id=12046c8d5b7e8dbec4125ba5f962532b&encoded=0&v=paper_preview&mkt=zh-cn [9] 邢关生, 杜春燕, 宗群, 等.基于一致性的小型四旋翼机群自主编队分布式运动规划[J].控制与决策, 2014, 29(11):2081-2084. http://www.cnki.com.cn/Article/CJFDTotal-KZYC201411028.htmXING G S, DU C Y, ZONG Q, et al.Consensus-based distributed motion planning for autonomous formation of miniature quadrotor groups[J].Control and Decision, 2014, 29(11):2081-2084(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-KZYC201411028.htm [10] 邱华鑫, 段海滨, 范彦铭.基于鸽群行为机制的多无人机自主编队[J].控制理论与应用, 2015, 32(10):1298-1304. http://www.doc88.com/p-9847651798228.htmlQIU H X, DUAN H B, FAN Y M.Multiple unmanned aerial vehicle autonomous formation based on the behavior mechanism in pigeon flocks[J].Control Theory & Applications, 2015, 32(10):1298-1304(in Chinese). http://www.doc88.com/p-9847651798228.html [11] JOONGBO S, YOUDAN K, TSOURDOS A, et al. Multiple UAV formation reconfiguration with collision avoidance guidance via different geometry concept[C]//28th International Congress of the Aeronautical Sciences. Birsbane: ICAS, 2012. [12] 茹常见, 魏瑞轩, 戴静, 等.基于纳什议价的无人机编队自主重构控制方法[J].自动化学报, 2013, 39(8):1349-1359. http://www.oalib.com/paper/4417603RU C J, WEI R X, DAI J, et al.Autonomous reconfiguration control method for UAV's formation based on nash bargain[J].Acta Automatica Sinica, 2013, 39(8):1349-1359(in Chinese). http://www.oalib.com/paper/4417603 [13] FERNANDEZ C A, BELMONTE L M, MORALES R, et al.Generalized proportional integral control for an unmanned quadrotor system[J].International Journal of Advanced Robotic Systems, 2015, 2:1-14. http://cn.bing.com/academic/profile?id=091561cc7ece6f036c52a4ced1742ee7&encoded=0&v=paper_preview&mkt=zh-cn [14] 郝妍娜, 洪志良.基于MCU和nRF905的低功耗远距离无线传输系统[J].集成电路应用, 2007(8):44-47. https://www.wenkuxiazai.com/doc/81b95a7acc7931b764ce152e.htmlHAO Y N, HONG Z L.A low-power long-range wireless data transmission platform based on MCU and nRF905 chip[J].Application of Integrated Circuits, 2007(8):44-47(in Chinese). https://www.wenkuxiazai.com/doc/81b95a7acc7931b764ce152e.html [15] 彭颖, 王高才, 黄书强, 等.移动网络中基于最优停止理论的数据传输能耗优化策略[J].计算机学报, 2016, 39(6):1162-1175. doi: 10.11897/SP.J.1016.2016.01162PENG Y, WANG G G, HUANG S Q, et al.An energy consumption optimization strategy for data transmission based on optimal stopping theory in mobile networks[J].Chinese Journal of Computer, 2016, 39(6):1162-1175(in Chinese). doi: 10.11897/SP.J.1016.2016.01162 [16] RERA O S, RICHARD M M.Consensus problems in networks of agents with switching topology and time-delays[J].IEEE Transactions on Automatic Control, 2004, 49(9):1520-1533. doi: 10.1109/TAC.2004.834113 [17] LIU X M, LIN H, CHEN B M. A graph-theoretic characterization of structural controllability for multi-agent system with switching topology[C]//Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference. Piscataway, NJ: IEEE Press, 2009: 7012-7017. [18] 张飞, 陈卫东.移动机器人编队自修复的切换拓扑控制[J].控制理论与应用, 2010, 27(3):289-295. http://industry.wanfangdata.com.cn/yj/Detail/Periodical?id=Periodical_kzllyyy201003002ZHANG F, CHEN W D.Switched topology control for self-healing of mobile robot formation[J].Control Theory & Applications, 2010, 27(3):289-295(in Chinese). http://industry.wanfangdata.com.cn/yj/Detail/Periodical?id=Periodical_kzllyyy201003002 [19] DANIEL R W, ROBBERTO F.Terminal guidance for lunar landing and retargeting using a hybrid control strategy[J].Journal of Guidance, Control, and Dynamics, 2016, 39(5):1168-1172. doi: 10.2514/1.G001411 [20] GALZI D, SHTESSEL Y. Closed-coupled formation flight control using quasi-continuous high-order sliding-mode[C]//American Control Conference. Piscataway, NJ: IEEE Press, 2007: 1799-1804. [21] 刘金琨.滑模变结构控制MATLAB仿真[M].2版.北京:清华大学出版社, 2012:211-325.LIU J K.Sliding mode control design and MATLAB simulation[M].2nd ed.Beijing:Tsinghua University Press, 2012:211-325(in Chinese). [22] RAFFO G V, ORTEGA M G, RUBIO F R.An integral predictive/nonlinear H∞ control structure for a quadrotor helicopter[J].Automatica, 2010, 46(1):29-39. doi: 10.1016/j.automatica.2009.10.018 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 975
- HTML全文浏览量: 144
- PDF下载量: 509
- 被引次数: 0
