



-
摘要:
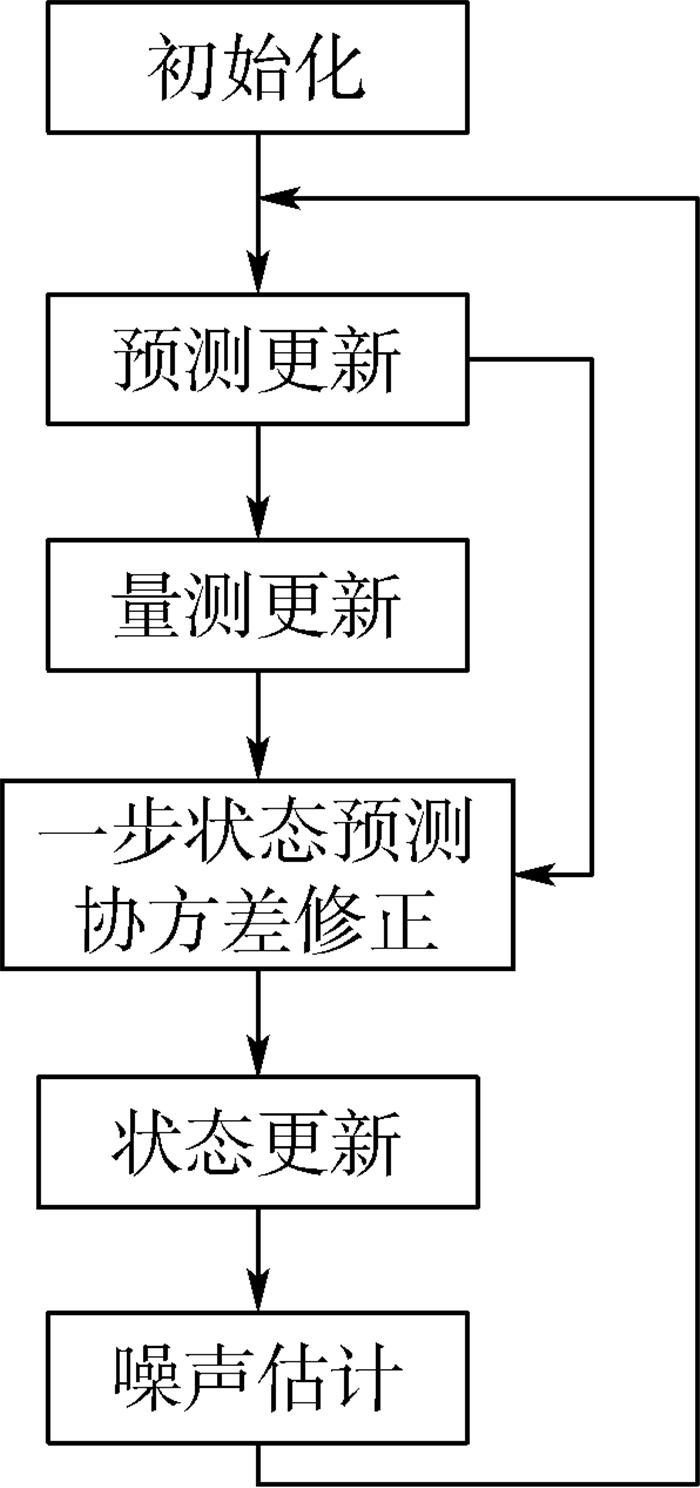
针对容积积分卡尔曼滤波(CQKF)受模型不确定性影响较大及需要精确已知噪声统计特性的缺点,提出了一种自适应强跟踪CQKF算法。该算法根据强跟踪滤波原理,引入渐消因子调整状态预测协方差矩阵,强迫残差序列正交,有效抑制了模型不确定性引起的滤波发散。在滤波过程中,利用Sage-Husa时变噪声统计估值器对过程噪声及量测噪声实时估计,提高了算法在未知时变噪声环境下的滤波精度。目标跟踪仿真实验验证了算法的有效性和鲁棒性。
-
关键词:
- 目标跟踪 /
- 容积积分卡尔曼滤波(CQKF) /
- 强跟踪滤波 /
- 噪声统计估值器 /
- 自适应滤波
Abstract:As cubature quadrature Kalman filter (CQKF) is easily influenced by uncertainty of state-space model and need to know exactly noise statistics, a new type of adaptive CQKF algorithm with strong tracking behavior is proposed. Based on the theory of strong tracking filter, the new algorithm introduces fading factor to adapt to covariance matrix and reinforces residual sequence to be orthogonal, which effectively suppresses the filtering divergence caused by the model uncertainty. In the process of filtering, processing noise and measurement noise should be estimated online by the Sage-Husa noise statistics estimator, which will improve the filter precision under the circumstance of unknown time-varying noise. Simulations of target tracking demonstrate the efficiency and robustness of the algorithm.
-
表 1 CQKF与AST-CQKF算法蒙特卡罗仿真计算时间
Table 1. Calculation time of Monte Carlo simulation in CQKF and AST-CQKF algorithm
仿真步数 仿真次数 仿真计算时间/s CQKF AST-CQKF 100 200 3.350 8 6.933 4 100 100 1.742 3 3.417 1 100 1 0.034 4 0.082 9 50 200 1.736 6 3.380 9 50 100 0.903 4 1.699 1 50 1 0.023 7 0.062 2  下载: 导出CSV
下载: 导出CSV
-
[1] KALMAN R E.A new approach to linear filtering and prediction theory[J].Transactions on ASME Journal of Basic Engineering, 1960, 82(D):35-46. http://www.cs.unc.edu/~welch/kalman/media/pdf/Kalman1960.pdf [2] JAZWINSKI A H.Stochastic processes and filtering theory[M].New York:Academic Press, 1970:235-237. [3] 李天成, 范红旗.孙树栋.粒子滤波理论、方法及其在多目标跟踪中的应用[J].自动化学报, 2015, 41(12):1981-2002. http://www.cqvip.com/QK/90250X/201512/667163350.htmlLI T C, FAN H Q, SUN S D.Particle filtering:Theory, approach, and application for multitar-get tracking[J].Acta Automatica Sinica, 2015, 41(12):1981-2002(in Chinese). http://www.cqvip.com/QK/90250X/201512/667163350.html [4] 韩萍, 干浩亮, 何炜琨, 等.基于迭代中心差分卡尔曼滤波的飞机姿态估计[J].仪器仪表学报, 2015, 36(1):187-193. http://www.cnki.com.cn/Article/CJFDTotal-YQXB201501026.htmHAN P, GAN H L, HE W K, et al.Iterated central difference Kalman filter based aircraft attitude estimation[J].Chinese Journal of Scientific Instrument, 2015, 36(1):187-193(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-YQXB201501026.htm [5] 王宝宝, 吴盘龙.基于平方根无迹卡尔曼滤波平滑算法的水下纯方位目标跟踪[J].中国惯性技术学报, 2016, 24(2):180-184. http://mall.cnki.net/magazine/Article/ZGXJ201602008.htmWANG B B, WU P L.Underwater bearing-only tracking based on square-root unscented Kalman filter smoothing algorithm[J].Journal of Chinese Inertial Technology, 2016, 24(2):180-184(in Chinese). http://mall.cnki.net/magazine/Article/ZGXJ201602008.htm [6] 张龙, 崔乃刚, 杨峰, 等.高阶容积卡尔曼滤波及其在目标跟踪中的应用[J].哈尔滨工程大学学报, 2016, 37(4):573-578. http://mall.cnki.net/magazine/Article/HEBG201604018.htmZHANG L, CUI N G, YANG F, et al.High-degree cubature Kalman filter and its application in target tracking[J].Journal of Harbin Engineering University, 2016, 37(4):573-578(in Chinese). http://mall.cnki.net/magazine/Article/HEBG201604018.htm [7] BHAUMIK S, WATI S.Cubature quarature Kalman filter[J]. IET Signal Processing, 2013, 7(7):533-541. doi: 10.1049/iet-spr.2012.0085 [8] LAINIOTIS D G.Optimal adaptive estimation:Structure and parameters adaption[J].IEEE Transactions on Automatic Control, 1971, 16(2):160-170. doi: 10.1109/TAC.1971.1099684 [9] MEHRA R K. On the identification of variances and adaptive filtering[J].IEEE Transactions on Automatic Control, 1970, 15(2):175-184. doi: 10.1109/TAC.1970.1099422 [10] ODELSON B J, RAJAMANI M R, RAWLINGS J B.A new autocovariance least-squares method for estimating noise covariances[J].Automatica, 2006, 42(2):303-308. doi: 10.1016/j.automatica.2005.09.006 [11] AKESSON B M, JORGENSON J B, POULSEN N K, et al.A generalized autocovariance least-squares method for Kalman filter tuning[J].Journal of Process Control, 2008, 18(7-8):769-779. doi: 10.1016/j.jprocont.2007.11.003 [12] MYERS K A, TAPLEY B D.Adaptive sequential estimation with unknown noise statistics[J].IEEE Transactions on Automatic Control, 1976, 21(8):520-523. [13] KASHYAP R L.Maximum likelihood identification of stochastic linear systems[J].IEEE Transactions on Automatic Control, 1970, 15(1):25-34. doi: 10.1109/TAC.1970.1099344 [14] LIMA F V, RAJAMANI M R, SODERSTROM T A, et al.Covariance and state estimation of weakly observable systems:Application to polymerization processes[J].IEEE Transactions on Control Systems Technology, 2013, 21(4):1249-1257. doi: 10.1109/TCST.2012.2200296 [15] 李宁, 祝瑞辉, 张勇刚.基于Sage-Husa算法的自适应平方根CKF目标跟踪方法[J].系统工程与电子技术, 2014, 36(10):1899-1905. doi: 10.3969/j.issn.1001-506X.2014.10.02LI N, ZHU R H, ZHANG Y G.Adaptive square CKF method for target tracking based on Sage-Husa algorithm[J].Systems Engineering and Electronics, 2014, 36(10):1899-1905(in Chinese). doi: 10.3969/j.issn.1001-506X.2014.10.02 [16] 王小旭, 潘泉, 黄鹤, 等.非线性系统确定采样型滤波算法综述[J].控制与决策, 2012, 27(6):801-812. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201206000.htmWANG X X, PAN Q, HUANG H, et al.Overview of deterministic sampling filtering algorithms for nonlinear system[J].Control and Decision, 2012, 27(6):801-812(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201206000.htm [17] 周东华, 席裕庚, 张钟俊.一种带多重次优渐消因子的扩展卡尔曼滤波器[J].自动化学报, 1991, 17(6):689-695. http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO199106006.htmZHANG D H, XI Y G, ZHANG Z J.A suboptimal multiple fading extended Kalman filter[J].Acta Automatica Sinica, 1991, 17(6):689-695(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO199106006.htm [18] 方君, 戴邵武, 许文明, 等.基于ST-SRCKF的超高速强机动目标跟踪算法[J].北京航空航天大学学报, 2016, 42(8):1698-1708. http://bhxb.buaa.edu.cn/CN/abstract/abstract13609.shtmlFANG J, DAI S W, XU W M, et al.Highly maneuvering hypervelocity-target tracking algorithm based on ST-SRCKF[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8):1698-1708(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13609.shtml [19] 张龙, 崔乃刚, 王小刚, 等.强跟踪-容积卡尔曼滤波在弹道式再入目标跟踪中的应用[J].中国惯性技术学报, 2015, 23(2):211-218. http://wuxizazhi.cnki.net/Sub/hkht/a/ZGXJ201502014.htmlZHANG L, CUI N G, WANG X G, et al.Strong tracking-cubature Kalman filter for tracking ballistic reentry target[J].Journal of Chinese Inertial Technology, 2015, 23(2):211-218(in Chinese). http://wuxizazhi.cnki.net/Sub/hkht/a/ZGXJ201502014.html [20] 赵琳, 王小旭, 孙明, 等.基于极大后验估计和指数加权的自适应UKF滤波算法[J].自动化学报, 2010, 36(7):1007-1019. http://mall.cnki.net/magazine/Article/MOTO201007014.htmZHAO L, WANG X X, SUN M, et al.Adaptive UKF filteing algorithm based on maximum a posterior estimation and exponential weighting[J].Acta Automatica Sinica, 2010, 36(7):1007-1019(in Chinese). http://mall.cnki.net/magazine/Article/MOTO201007014.htm [21] 丁家琳, 肖建, 赵涛.自适应CKF强跟踪滤波器及其应用[J].电机与控制学报, 2015, 19(11):111-120. http://www.cnki.com.cn/Article/CJFDTotal-DJKZ201511018.htmDING J L, XIAO J, ZHAO T.Adaptive CKF strong tracking filter and application[J].Electric Machines and Control, 2015, 19(11):111-120(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-DJKZ201511018.htm -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 848
- HTML全文浏览量: 94
- PDF下载量: 515
- 被引次数: 0
