



Violation elimination of nominal models for manipulators constructed with Udwadia-Kalaba equation
-
摘要:
采用Udwadia-Kalaba方程构建的操作臂轨迹跟踪控制器名义模型中,初始条件难以满足约束方程,数值求解过程产生误差累积造成的约束违约是亟待解决的问题。通过在数值求解过程所产生位置和速度项上添加修正项直接消除违约误差的方法,对该问题进行了研究。根据Udwadia-Kalaba建模思想,构建了期望轨迹下三杆操作臂的动力学名义模型并进行轨迹跟踪仿真。分别利用传统的Baumgarte约束稳定法与所提出误差直接消除法对仿真数值结果进行了修正。结果显示,所提误差直接消除法可更加快速直接地将约束违约控制在更小范围,更适用于操作臂动力学名义模型修正的使用。
-
关键词:
- 机器人操作臂 /
- 动力学建模 /
- 违约消除 /
- 约束流形 /
- Udwadia-Kalaba方程
Abstract:In the nominal model of the manipulator trajectory tracking controller constructed by Udwadia-Kalaba equation, the initial conditions are difficult to satisfy the constraint equations, and the constraint violation is generated by the accumulation of errors in the process of numerical solution, which are all problems to be solved at present. Problems are solved by the method of eliminating violation errors directly. This method adds correction items to position and speed terms which are produced by the numerical solution process. The dynamic nominal model of the three-link manipulator is constructed, and the trajectory tracking simulation is carried out under the desired trajectory based on the Udwadia-Kalaba modeling idea. The simulation numerical results are corrected by using the traditional Baumgarte stability method and the proposed error direct elimination method. The results show that the direct elimination method can control the constraint violation in a smaller range more quickly, and is more suitable for the use of trajectory correction to manipulator dynamic nominal model.
-

图 2 操作臂各关节角度随时间变化曲线
Figure 2. Curves of each manipulator joint's angle changing with time

图 3 操作臂各关节角速度随时间变化曲线
Figure 3. Curves of each manipulator joint's angular velocity changing with time

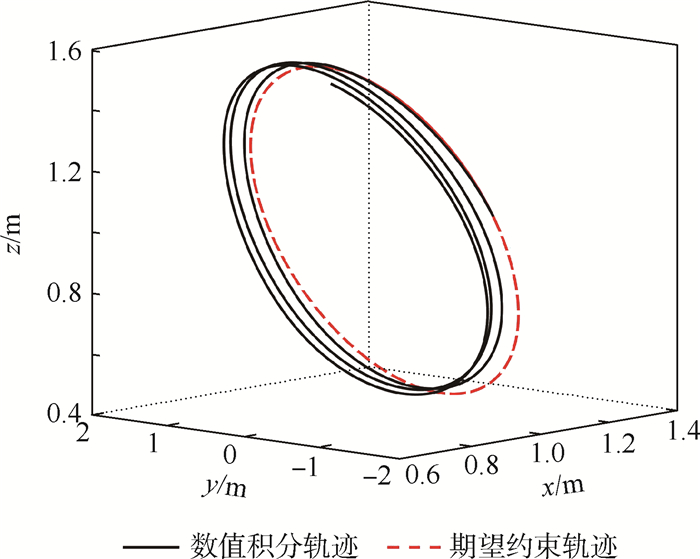
图 4 操作臂末端在Cartesian空间运动轨迹
Figure 4. Motion trajectories of end point of manipulator in Cartesian space

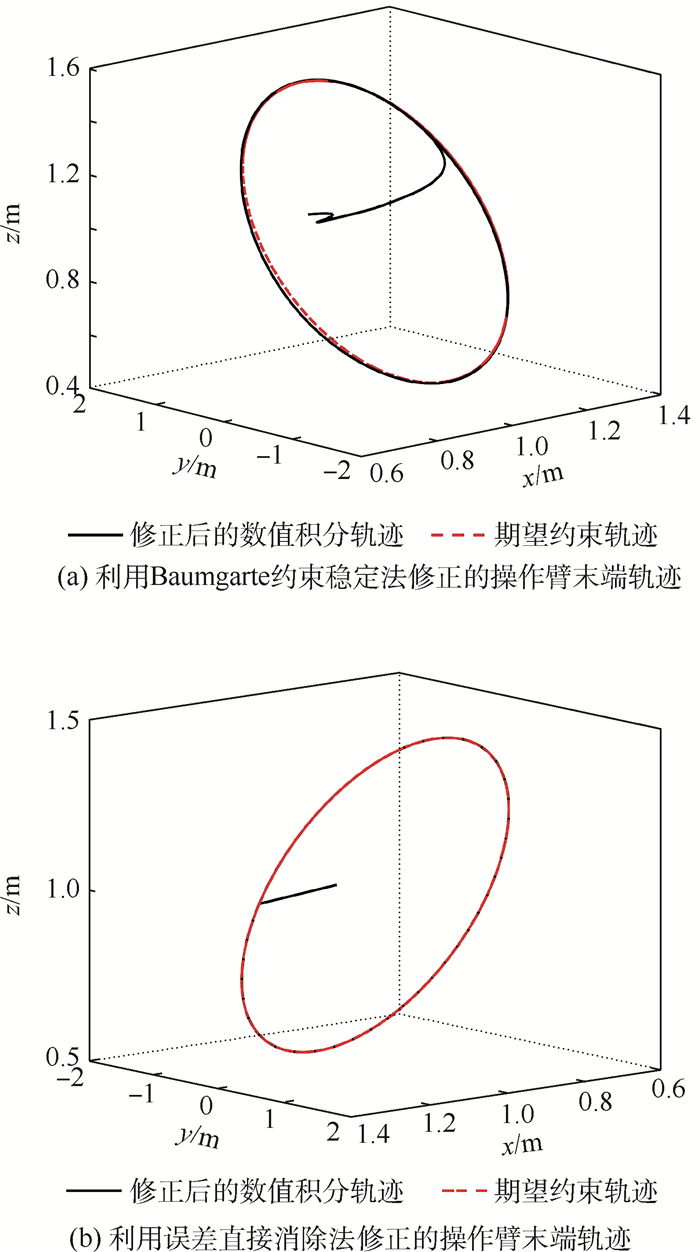
图 5 修正后工作空间操作臂末端轨迹
Figure 5. Corrected trajectories of end point of spatial manipulator
-
[1] LIANG X, WAN Y, ZHANG C.Task space trajectory tracking control of robot manipulators with uncertain kinematics and dynamics[J].Mathematical Problems in Engineering, 2017(2017):4275201. http://ieeexplore.ieee.org/document/7484342/ [2] SAEED K, MEHDI F M.Uncertainty estimation in robust tracking control of robot manipulators using the Fourier series expansion[J].Robotica, 2015, 35(2):310-336. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=1348c074ff62b7cd2bd1ceea8dbc5269 [3] XIAO B, YIN S, KAYNAK O.Tracking control of robotic manipulators with uncertain kinematics and dynamics[J].IEEE Transactions on Industrial Electronics, 2016, 63(10):6439-6449. doi: 10.1109/TIE.2016.2569068 [4] YAO J, DENG W.Active disturbance rejection adaptive control of uncertain nonlinear systems:Theory and application[J].Nonlinear Dynamics, 2017, 89(3):1611-1624. doi: 10.1007/s11071-017-3538-6 [5] GALICKI M.Robust task space finite-time chattering-free control of robotic manipulators[J].Journal of Intelligent and Robotic Systems Theory and Applications, 2017, 85(3-4):471-489. doi: 10.1007/s10846-016-0387-3?view=classic [6] UDWADIA F E, KALABA R E.A new perspective on constrained motion[J].Proceedings Mathematical and Physical Sciences, 1992, 439(1906):407-410. doi: 10.1098/rspa.1992.0158 [7] UDWADIA F E, KALABA R E.Equations of motion for mechanical systems:A unified approach[J].Journal of Aerospace Engineering, 1996, 9(3):64-69. doi: 10.1061/(ASCE)0893-1321(1996)9:3(64) [8] UDWADIA F E, PHOHOMSIRI P.Explicit equations of motion for constrained mechanical systems with singular mass matrices and applications to multi-body dynamics[J].Proceedings:Mathematical, Physical and Engineering Sciences, 2006, 462(2071):2097-2117. doi: 10.1098/rspa.2006.1662 [9] SCHUTTE A, UDWADIA F.New approach to the modeling of complex multibody dynamical systems[J].Journal of Applied Mechanics, 2011, 78(2):856-875. http://adsabs.harvard.edu/abs/2011JAM....78b1018S [10] PETERS J, MISTRY M, UDWADIA F, et al.A unifying framework for robot control with redundant DOFS[J].Autonomous Robots, 2008, 24(1):1-12. doi: 10.1007/s10514-007-9051-x [11] UDWADIA F E, MYLAPILLI H.Constrained motion of mecha-nical systems and tracking control of nonlinear systems:Connections and closed-form results[J].Nonlinear Dynamics and Systems Theory, 2014:15(1):73-89. https://www.researchgate.net/publication/273135173_Constrained_Motion_of_Mechanical_Systems_and_Tracking_Control_of_Nonlinear_Systems_Connections_and_Closed-form_Results [12] UDWADIA F E, KOGANTI P B.Optimal stable control for nonlinear dynamical systems:An analytical dynamics based app-roach[J].Nonlinear Dynamics, 2015, 82(1-2):547-562. doi: 10.1007/s11071-015-2175-1 [13] 刘佳, 刘荣.双臂协调机械手动力学建模的新方法[J].北京航空航天大学学报, 2016, 42(9):1903-1910. http://bhxb.buaa.edu.cn/CN/abstract/abstract13723.shtmlLIU J, LIU R.New approach for dynamics modeling of dual-arm cooperating manipulators[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(9):1903-1910(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13723.shtml [14] 徐亚茹, 刘荣.一种爬壁机器人动力学建模方法[J].北京航空航天大学学报, 2018, 44(2):280-285. http://bhxb.buaa.edu.cn/CN/abstract/abstract14323.shtmlXU Y R, LIU R.An approach for dynamics modeling of climbing robot[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(2):280-285(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14323.shtml [15] UDWADIA F E, WANICHANON T.Control of uncertain nonlinear multibody mechanical systems[J].Journal of Applied Mechanics, 2014, 81(4):041020. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=9452dd09b883548366cb09f49a1da0a1 [16] WANICHANON T, CHO H, UDWADIA F E.An approach to the dynamics and control of uncertain multi-body systems[C]//IUTAM Symposium on Dynamical Analysis of Multibody Systems with Design Uncertainties.Amsterdam: Elsevier, 2015: 43-52. https://www.sciencedirect.com/science/article/pii/S2210983815000140 [17] KOGANTI P B, UDWADIA F E.Dynamics and precision control of uncertain tumbling multibody systems[J].Journal of Guidance, Control, and Dynamics 2017, 40(5):1176-1190. doi: 10.2514/1.G002212 [18] LIU J, LIU R.Simple method to the dynamic modeling of industrial robot subject to constraint[J].Advances in Mechanical Engineering, 2016, 8(4):1687814016646511. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=Doaj000004724974 [19] UDWADIA F E.A new perspective on the tracking control of nonlinear structural and mechanical systems[J].Proceedings Mathematical Physical and Engineering Sciences, 2003, 459(2035):1783-1800. doi: 10.1098/rspa.2002.1062 [20] CHO H, UDWADIA F E.Explicit control force and torque determination for satellite formation-keeping with attitude requirements[J].Journal of Guidance, Control, and Dynamics, 2013, 36(2):589-605. doi: 10.2514/1.55873 [21] 张新荣, 孟为来.基于虚位移分解与伺服轨迹约束的机械系统跟踪控制[J].机械工程学报, 2015, 51(3):45-50. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201503007ZHANG X R, MENG W L.Trajectory tracking control of mechanical systems based on virtual displacement decomposition and servo constraint following[J].Journal of Mechanical Engineering, 2015, 51(3):45-50(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jxgcxb201503007 -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 818
- HTML全文浏览量: 179
- PDF下载量: 370
- 被引次数: 0
