



Flight collision resolution and recovery strategy based on velocity obstacle method
-
摘要:
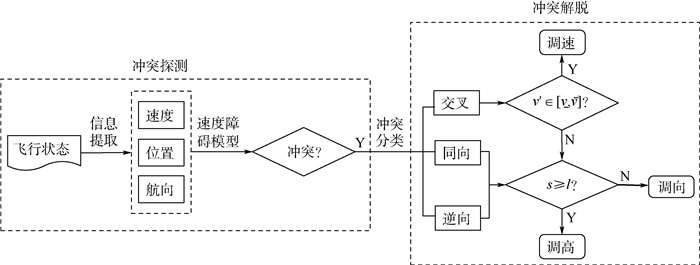
针对飞行中的冲突解脱和航迹恢复问题,在速度障碍法模型的基础上提出了一种几何优化的方法,并对这个问题进行了严格的数学描述。首先根据飞机之间的相对位置和速度关系,确定其冲突类型,以及是否满足各解脱策略的条件,选取相应的解脱策略,待冲突解脱完成后,飞机恢复至原航线飞行。然后通过几何分析,理论推导,该模型能够有效解决飞行冲突,并且具体给出冲突解脱和航迹恢复的位置。最后在仿真中,所提方法根据不同场景能够自主选择冲突解脱策略,结果显示该方法简单高效,并且在航迹恢复过程中不引入新的飞行冲突。
Abstract:A geometric optimization algorithm is proposed based on velocity obstacle method to solve the problem of flight collision resolution and track recovery. We gave a rigorous mathematical description of the problem. Firstly, according to the relative position and speed relationship between the aircraft, the collision type and whether the conditions of each release strategy are met are determined, and the corresponding resolution strategy is adopted. After the collision was resolved, the plane resumed its flight on the original route. The model can effectively solve flight collision through geometric analysis and theoretical derivation. In addition, the track recovery point and the parameter solving process involved are given in detail. Finally, in the simulation, the algorithm chooses the collision resolution strategy independently according to different scenes. The results show that this method is simple and efficient, and the track recovery redirects the ownership to its original target waypoint without introducing new flight collision.
-

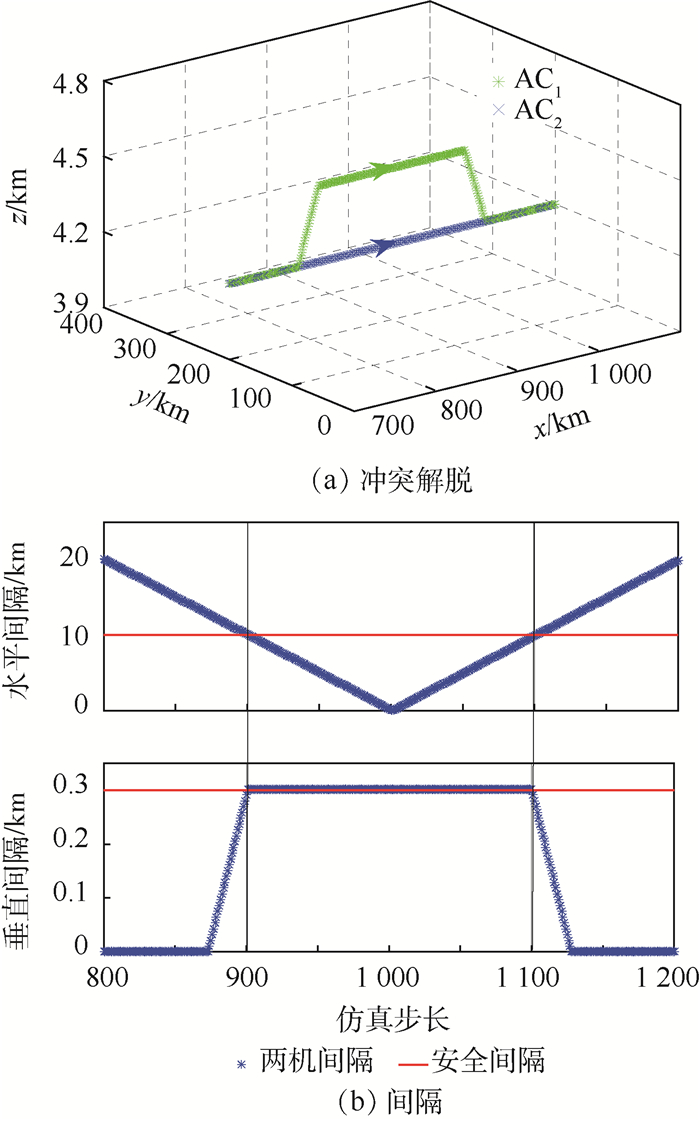
图 11 同向飞行高度解脱(场景1)
Figure 11. Elevation resolution for the same track of flight (Scene 1)

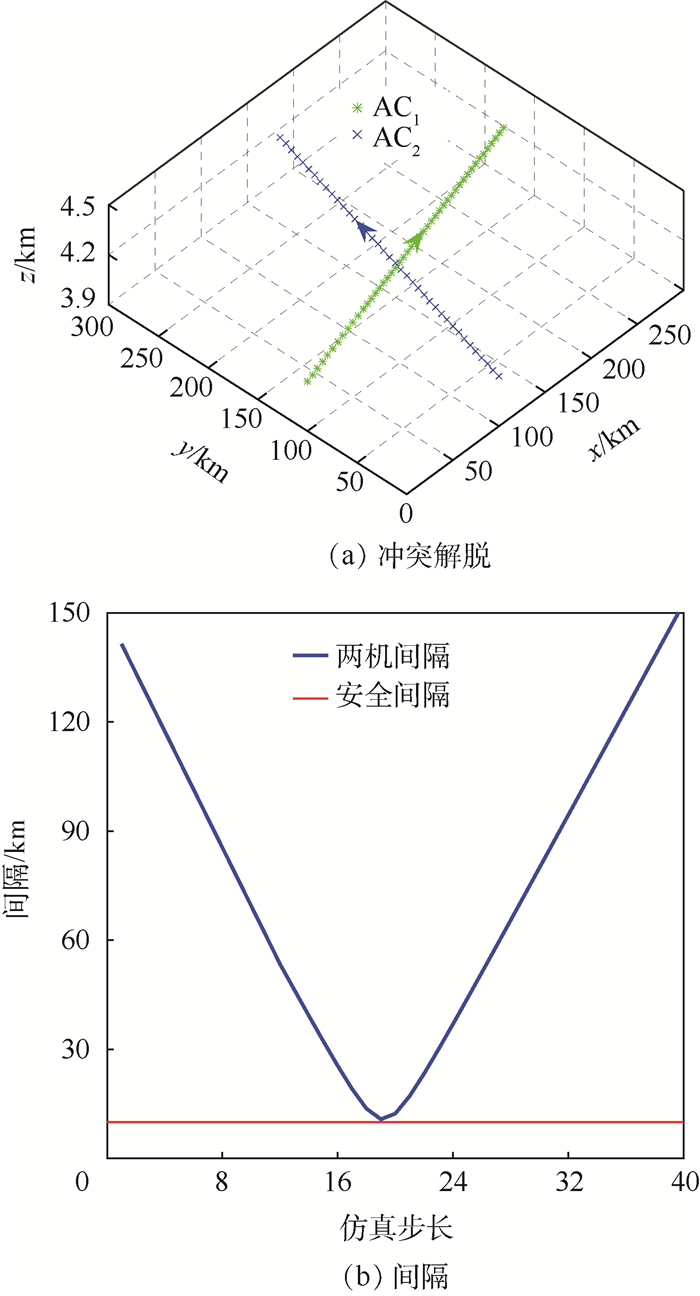
图 12 逆向飞行航向解脱(场景2)
Figure 12. Heading resolution for opposite track of flight (Scene 2)

图 13 交叉飞行高度解脱(场景3)
Figure 13. Elevation resolution for cross track of flight (Scene 3)
表 1 位置信息
Table 1. Position information
场景 起点/km 航向/(°) 速度/(km·h-1) 仿真步长/h 1 (0, 200, 4.2) 90 800 0.001 (110, 200, 4.2) 90 700 2 (200, 200, 4.2) 90 800 0.001 (250, 200, 4.2) 270 800 3 (0, 100, 4.2) 90 800 0.001 (100, 0, 4.2) 0 800 4 (0, 100, 4.2) 75 800 0.01 (100, 0, 4.2) 15 800  下载: 导出CSV
下载: 导出CSV
表 2 策略选取
Table 2. Strategy selection
场景 类型 冲突解脱所需速度/(km·h-1) 间隔s/km 距离l/km 判断 冲突解脱方式 小速度解脱 大速度解脱 1 同向 110 12.78 s≥l ER 2 逆向 50 53.25 s<l HR 3 交叉 465.4 1 208.9 141.42 41.43 v′1∉[600, 900] km/h & v″1∉[600, 900] km/h ER 4 交叉 631.3 609.8 141.42 32.22 v′1∈[600, 900] km/h & v″1∈[600, 900] km/h SR
下载: 导出CSV
表 3 飞行状态改变点
Table 3. Flight state change point
场景 冲突解脱点/km 航迹恢复点/km 切入原航迹点/km 1 (778.4, 200, 4.2) (960.8, 200, 4.5) (983.2, 200, 4.2) 2 (200, 200, 4.2) (226.5, 211.3, 4.2) (253, 200, 4.2) 3 (71.2, 100, 4.2) (110.4, 100, 4.5) (132.8, 100, 4.2) 4 (88.3, 123.7, 4.2) (132.8, 135.6, 4.2) (200.1, 153.6, 4.2)
下载: 导出CSV
-
[1] BILIMORIA K D.A geometric optimization approach to aircraft conflict resolution: AIAA-2000-4265[R].Reston: AIAA, 2000. [2] BILIMORIA K D, SRIDHAR B, CHATTERJI G B.FACET: Future ATM concepts evaluation tool[C]//3rd USA/Europe Air Traffic Management R&D Seminar, 2000. doi: 10.2514/atcq.9.1.1 [3] HWANG I, KIM J, TOMLIN C.Protocol-based conflict resolution for air traffic control[C]//7th USA/Europe Air Traffic Management R&D Seminar, 2007. doi: 10.2514/atcq.15.1.1 [4] GESER A, MUNOZ C.A geometric approach to strategic conflict detection and resolution[C]//Digital Avionics Systems Conference.Piscataway, NJ: IEEE Press, 2002, 1(6B): 1-11. https://ieeexplore.ieee.org/document/1067985 [5] ZHANG Y, ZHANG M, YU J.Real-time flight conflict detection and release based on multi-agent system[C]//IOP Conference Series: Earth and Environmental Science.Bristol: IOP Publishing, 2018: 032053. [6] GOSS J, RAJVANSHI R, SUBBARAO K.Aircraft conflict detection and resolution using mixed geometric and collision cone approaches: AIAA-2004-4879[R].Reston: AIAA, 2004. [7] MUELLER T, SCHLEICHER D, BILIMORIA K D.Conflict detection and resolution with traffic flow constraints: AIAA-2002-4445[R].Reston: AIAA, 2002. [8] 李雄, 徐肖豪, 朱承元.基于几何算法的空中交通改航路径规划[J].系统工程, 2008, 26(8):37-40. doi: 10.3969/j.issn.1001-4098.2008.08.007LI X, XU X H, ZHU C Y.Air traffic reroute planning based on geometry algorithm[J].Systems Engineering, 2008, 26(8):37-40(in Chinese). doi: 10.3969/j.issn.1001-4098.2008.08.007 [9] BERG J V D, LIN M, MANOCHA D.Reciprocal velocity obstacles for real-time multi-agent navigation[C]//2008 IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2008: 1928-1935. https://ieeexplore.ieee.org/document/4543489 [10] BERG J V D, GUY S, LIN M, et al.Reciprocal n-body collision avoidance[C]//The 14th International Symposium ISRR.Berlin: Springer, 2011: 3-19. [11] DURAND N, BARNIER N.Does ATM need centralized coordination Autonomous conflict resolution analysis in a constrained speed environment[C]//11th USA/E Air Traffic Management R&D Seminar, 2015. doi: 10.2514/atcq.23.4.325 [12] ALLIGNOL C, BARNIER N, DURAND N, et al.Assessing the robustness of a UAS detect & avoid algorithm[C]//12th USA/Europe Air Traffic Management R&D Seminar, 2017. [13] 杨秀霞, 周硙硙, 张毅.基于速度障碍圆弧法的UAV自主避障规划研究[J].系统工程与电子技术, 2017, 39(11):168-176. http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201701025YANG X X, ZHOU W W, ZHANG Y.Automatic obstacle-avoidance planning for UAV based on velocity obstacle arc method[J].Systems Engineering and Electronics, 2017, 39(11):168-176(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201701025 [14] 杨秀霞, 张毅, 周硙硙.一种动态不确定环境下UAV自主避障算法[J].系统工程与电子技术, 2017, 39(11):2546-2552. doi: 10.3969/j.issn.1001-506X.2017.11.23YANG X X, ZHANG Y, ZHOU W W.Automatic obstacle avoidance algorithm for UAV in dynamic uncertain environment[J].Systems Engineering and Electronics, 2017, 39(11):2546-2552(in Chinese). doi: 10.3969/j.issn.1001-506X.2017.11.23 [15] 蒋旭瑞, 吴明功, 温祥西, 等.基于合作博弈的多机飞行冲突解脱策略[J].系统工程与电子技术, 2018, 40(11):2482-2490. doi: 10.3969/j.issn.1001-506X.2018.11.14JIANG X R, WU M G, WEN X X, et al.Conflict resolution of multi-aircraft based on the cooperative game[J].Systems Engineering and Electronics, 2018, 40(11):2482-2490(in Chinese). doi: 10.3969/j.issn.1001-506X.2018.11.14 [16] 吴明功, 王泽坤, 温祥西, 等.飞行冲突解脱的几何优化模型[J].系统工程与电子技术, 2019, 41(4):863-869. http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201904024WU M G, WANG Z K, WEN X X, et al.Aircraft conflict resolution model based on geometric optimization[J].Systems Engineering and Electronics, 2019, 41(4):863-869(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/xtgcydzjs201904024 -

 下载:
下载:







 点击查看大图
点击查看大图

计量
- 文章访问数: 1421
- HTML全文浏览量: 40
- PDF下载量: 447
- 被引次数: 0
