



-
摘要:
GPS接收机在测量卫星到接收机的传播距离时,通常能得到码相位和载波相位2个基本测量值。虽然载波相位测量值比码相位测量值精度高,但存在整周模糊度的问题,在实际应用中比采用码相位的技术付出的代价高很多。因此,基于相位条纹技术,提出了一种高精度的码相位测量方法。在传统码跟踪环的基础上,通过提取互功率谱相位条纹的频率,得到高精度的码相位测量值,从而组装出高精度的码伪距。仿真实验结果表明:在信噪比为-15 dB的情况下,码相位测量误差均方差约0.37 m,优于传统延迟锁定环在相同条件下约1.82 m的跟踪精度。得到了比传统码跟踪环更高的码相位测量精度的同时,不需要解算载波相位的整周模糊度,对提高GPS定位精度具有研究意义和应用价值。
Abstract:When GPS receiver measures the propagation distance from satellites to the receiver, it can usually obtain two basic measurement values, code phase and carrier phase. Although the precision of carrier phase measurement is higher than that of code phase measurement, there exists the integer ambiguity problem, whose cost is much higher than that of using code phase technique in practical application. Therefore, based on the phase stripe technique, a high-precision code phase measurement method was proposed. On the basis of the traditional code tracking loop, the high-precision code phase measurement value is obtained by extracting the frequency of the phase stripes of the cross-correlation power spectrum, so as to assemble a high-precision code pseudo-range. Simulation results show that the precision of code phase measurement is about 0.37 m when the SNR is -15 dB, which is better than the tracking accuracy of 1.82 m under the same condition of traditional delay lock loop. At the same time of obtaining the higher-precision code phase measurements, the integer ambiguity of the carrier phase does not need to be solved, which has research significance and application value for improving the GPS positioning precision.
-
Key words:
- GPS /
- cross-correlation /
- phase stripe /
- code phase /
- code tracking loop
-

图 1 延迟1 s的两路相同信号互功率谱相位条纹
Figure 1. Cross-correlation power spectrum phase stripes of two same signals with a delay of 1 s

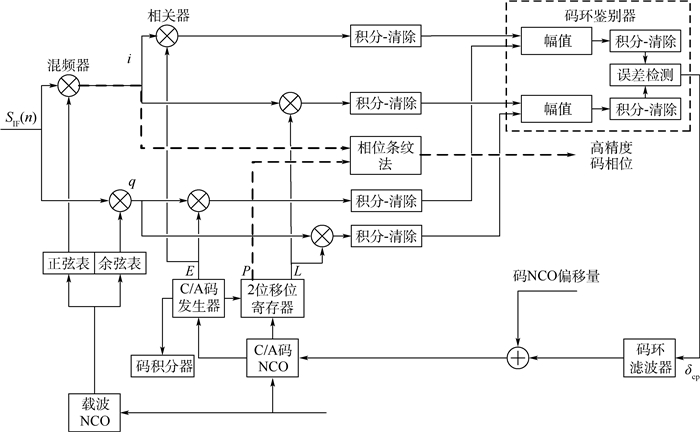
图 2 典型接收机码跟踪环路及相位条纹法结构
Figure 2. Structure of typical receiver code tracking loop and phase stripe method

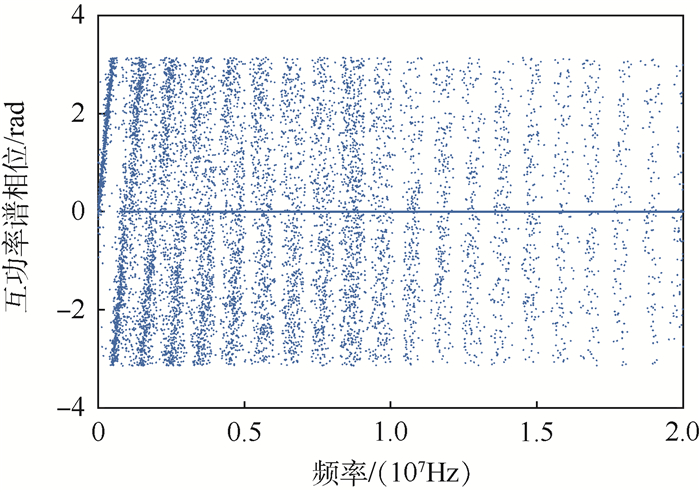
图 7 接收信号与本地码信号的互功率谱相位条纹
Figure 7. Cross-correlation power spectrum phase stripes between received signal and local code signal
表 1 仿真参数
Table 1. Simulation parameters
参数 数值 信号长度/ms 10 中频载波频率/MHz 4[13] 伪码长度/bit 1 023 码速率/Mcps 1.023 采样频率/MHz 100 设定待测时延/ns 10 补偿时延/ns 1 000 时域折叠段数 10  下载: 导出CSV
下载: 导出CSV
表 2 码相位测量误差均方差结果
Table 2. RMSE results of code phase measurement error
信噪比/dB 码相位测量误差均方差/m 相位条纹法 相干点积功率法 -15 0.371 1 1.821 7 -17 0.448 7 2.293 3 -19 0.549 7 2.887 1 -21 0.750 4 3.634 7 -23 1.129 2 4.575 8 -25 1.863 2 5.760 6
下载: 导出CSV
-
[1] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社, 2017.XIE G.Principles of GPS and receiver design[M].Beijing:Publishing House of Electronics Industry, 2017(in Chinese). [2] 鲁郁.北斗/GPS双模软件接收机原理与实现技术[M].北京:电子工业出版社, 2016.LU Y.BeiDou/GPS dual-mode software receiver principle and implementation technology[M].Beijing:Publishing House of Electronics Industry, 2016(in Chinese). [3] MISRA P, ENGE P.Global positioning system:Signals, measurements, and performance[M].2nd ed.Warszawa:Ganga-Jamuna Press, 2006. [4] 罗柳镇.高精度卫星测距技术研究与实现[D].南京: 南京理工大学, 2016: 37-43. http://cdmd.cnki.com.cn/Article/CDMD-10288-1017056980.htmLUO L Z.Research and realization of high precision satellite ranging technology[D].Nanjing: Nanjing University of Science and Technology, 2016: 37-43(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10288-1017056980.htm [5] 刘盟超, 赵丙风.GNSS接收机自适应带宽伪码跟踪环路设计[J].无线电通信技术, 2017, 43(4):64-66. doi: 10.3969/j.issn.1003-3114.2017.04.15LIU M C, ZHAO B F.Design of adaptive bandwidth DLL for GNSS receivers[J].Radio Communications Technology, 2017, 43(4):64-66(in Chinese). doi: 10.3969/j.issn.1003-3114.2017.04.15 [6] 邓中亮, 赵洋, 尹露, 等.一种提高伪距测量精度方法研究[C]//第六届中国卫星导航学术年会论文集.北京: 中国卫星导航系统管理办公室学术交流中心, 2015: 4.DENG Z L, ZHAO Y, YIN L, et al.An improved pseudo-range measurement method research[C]//6th China Satellite Navigation Conference(CSNC).Beijing: Academic Exchange Centre of China Satellite Navigation Office, 2015: 4(in Chinese). [7] 龚国辉, 李思昆.提高DSSS信号PN码相位测量精度的三点二次插值法[J].通信学报, 2007, 28(2):130-133. doi: 10.3321/j.issn:1000-436X.2007.02.021GONG G H, LI S K.Improving DSSS signal PN code phase measurement precision by 3-points quadratic interpolation[J].Journal on Communications, 2007, 28(2):130-133(in Chinese). doi: 10.3321/j.issn:1000-436X.2007.02.021 [8] 罗海军, 彭卫东, 李明阳, 等.基于分段直线拟合的伪随机码相位测量法[J].计算机测量与控制, 2015, 23(3):727-729. doi: 10.3969/j.issn.1671-4598.2015.03.015LUO H J, PENG W D, LI M Y, et al.Method of phase measurement of PN codes based on piecewise linear fitting[J].Computer Measurement and Control, 2015, 23(3):727-729(in Chinese). doi: 10.3969/j.issn.1671-4598.2015.03.015 [9] 胡修林, 张俊, 杨灵.直接序列扩频通信系统中PN码相位的精确测量方法[J].电讯技术, 2005, 45(3):128-131. doi: 10.3969/j.issn.1001-893X.2005.03.029HU X L, ZHANG J, YANG L.A method for accurately measuring the phase of PN code in DSSS systems[J].Telecommunication Engineering, 2005, 45(3):128-131(in Chinese). doi: 10.3969/j.issn.1001-893X.2005.03.029 [10] 张波, 郭英, 齐子森, 等.PN码相位精确测量的累加最小二乘法[J].北京航空航天大学学报, 2016, 42(10):2265-2270. https://bhxb.buaa.edu.cn/CN/abstract/abstract13737.shtmlZHANG B, GUO Y, QI Z S, et al.Precise measurement of PN code phase by accumulative least square method[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(10):2265-2270(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract13737.shtml [11] PIERSOL A G.Time delay estimation using phase data[J]. IEEE Transactions on Acoustics, Speech, and Signal Processing, 1981, 29(3):471-477. doi: 10.1109/TASSP.1981.1163555 [12] 熊庆旭, 刘锋, 常青.信号与系统[M].北京:高等教育出版社, 2011.XIONG Q X, LIU F, CHANG Q.Signals and systems[M].Beijing:Higher Education Press, 2011(in Chinese). [13] BRAASCH M S, VAN DIERENDONCK A J.GPS receiver architectures and measurements[J].Proceedings of the IEEE, 1999, 87(1):48-64. doi: 10.1109/5.736341 [14] 王松瑞.北斗二代接收机捕获跟踪算法研究与实现[D].西安: 西安电子科技大学, 2017: 37-38. http://cdmd.cnki.com.cn/Article/CDMD-10701-1017300627.htmWANG S R.Research and implementation of the BD-Ⅱ receiver acquisition and tracking algorithm[D].Xi'an: Xidian University, 2017: 37-38(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10701-1017300627.htm [15] VAN DIERENDONCK A J, FENTON P, FORD T.Theory and performance of narrow correlator spacing in a GPS receiver[J].Navigation, 1992, 39(3):265-283. doi: 10.1002/navi.1992.39.issue-3 -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 585
- HTML全文浏览量: 49
- PDF下载量: 338
- 被引次数: 0
