



Quality evaluation model of unmanned aerial vehicle's horizontal flight maneuver based on flight data
-
摘要:
针对无人机(UAV)操纵质量高低多依赖专家主观评判、不同飞行动作缺乏针对性评判标准的问题,建立了根据飞行数据客观评价无人机平飞动作质量的模型。首先通过建立平飞判别规则识别无人机飞行数据中的平飞动作数据段,然后根据布林通道理论计算各平飞数据段内多个飞行参数的得分值,最后通过"熵权法"确定各参数的权重,进而得到反映不同无人机操控手平飞动作质量的指标数据。将一次四边平飞训练任务中4组不同无人机操控手操纵和1组无人机自主控制的飞行数据输入该模型,计算结果表明,模型可以较好地识别平飞动作并区分不同操控手平飞动作质量的高低,可以为无人机操控手的训练提供参考。
Abstract:The unmanned aerial vehicle (UAV) manipulator's flying performance mostly relies on experts' subjective evaluation and different flight maneuvers lack pertinent evaluation criteria, so a model which uses flight data to evaluate the horizontal flight quality of UAV is established. Firstly, the flight data segment of UAV's horizontal flight maneuver was identified by the flight discrimination rules. Then, according to Bollinger bands theory, the scores of multiple flight parameters in each flight data segment were calculated. Finally, the weight of each parameter was determined by the entropy weight method and the indexes reflecting the horizontal flight maneuver's quality of different UAV manipulators were obtained. In a quadrilateral flying training mission, four groups of different UAV maneuvers' flight data and one group of flight data under autonomous control were input into the model. The calculation results show that the model can well identify the horizontal flight maneuver and distinguish the horizontal flight maneuver's quality of different manipulators, which can provide advice for the training of UAV manipulators.
-

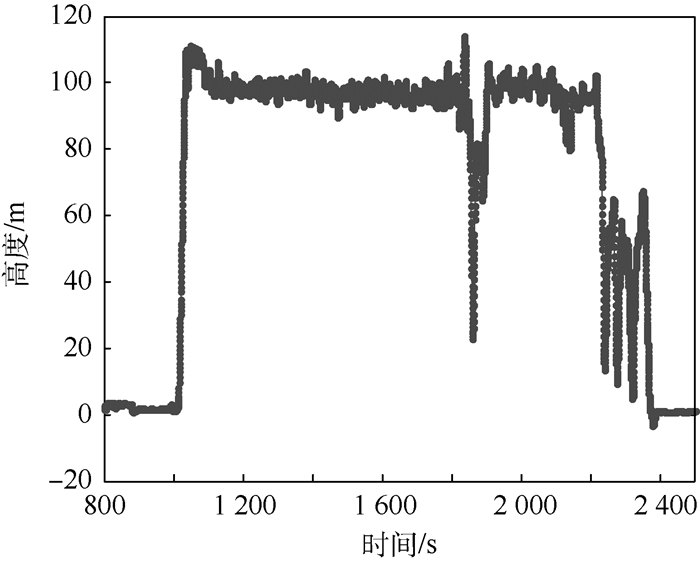
图 8 自主控制模式下的平飞数据段
Figure 8. Horizontal flight data segments in autonomous control mode
表 1 无人机操控手飞行参数评分
Table 1. Scoring for flight parameters of UAV manipulators
平飞段 参数1 参数2 … 参数n 1 X11 X12 … X1n 2 X21 X22 … X2n ⋮ ⋮ ⋮ ⋮ ⋮ m Xm1 Xm2 … Xmn  下载: 导出CSV
下载: 导出CSV
表 2 平飞数据段
Table 2. Horizontal flight data segments
序号 起始时间/s 结束时间/s 1 4 666 4 688 2 4 698 4 721 3 4 757 4 783 4 4 849 4 872 5 5 428 5 457 6 5 787 5 808 7 6 172 6 206 8 6 366 6 393 9 6 674 6 699 10 6 787 6 808 11 6 871 6 892 12 7 045 7 074 13 7 237 7 269 14 8 089 8 114 15 8 186 8 210 16 8 266 8 300 17 8 428 8 458 18 8 662 8 698 19 8 852 8 888
下载: 导出CSV
表 3 评分表
Table 3. Score sheet
序号 高度得分 速度得分 俯仰得分 偏航得分 滚转得分 1 1.400 4 0.627 5 0.202 2 0.220 6 0.901 7 2 4.208 2 0.672 7 0.339 7 0.275 3 1.118 8 3 1.737 1 0.819 9 0.332 7 0.226 7 0.859 4 1.185 9 0.684 1 0.066 5 0.147 9 0.515 1 5 1.307 8 0.557 7 0.281 8 0.213 3 0.747 4 6 1.006 2 0.450 3 0.120 5 0.183 0.698 8 7 1.735 8 0.784 9 0.132 9 0.197 4 0.746 8 8 4.139 5 0.564 0.152 1 0.165 5 0.674 2 9 1.528 7 0.422 2 0.086 1 0.152 7 0.527 10 1.49 2 0.462 8 0.174 0.232 8 0.773 3 11 1.009 7 0.445 4 0.059 3 0.163 6 0.540 6 12 0.999 9 0.371 8 0.130 1 0.197 4 0.704 5 13 1.951 1 0.465 5 0.148 8 0.201 5 0.680 9 14 2.379 8 0.641 2 0.065 9 0.152 3 0.483 15 1.930 5 1.171 6 0.301 9 0.367 6 1.366 6 16 1.957 7 0.594 1 0.157 8 0.191 6 0.808 9 17 3.418 5 0.724 9 0.123 6 0.209 6 1.010 2 18 0.876 7 0.595 5 0.213 0.252 8 0.955 1 19 0.653 1 0.556 6 0.118 5 0.165 8 0.646 3
下载: 导出CSV
表 4 最终得分排名
Table 4. Final score ranking
操控主体 得分 平飞段数 排名 操控手1 0.208 07 19 第4名 操控手2 0.170 01 28 第3名 操控手3 0.145 02 39 第2名 操控手4 0.351 29 5 第5名 自主操纵 0.100 78 49 第1名
下载: 导出CSV
-
[1] DAS S, MATTHEWS B L, LAWRENCE R. Fleet level anomaly detection of aviation safety data[C]//IEEE Conference on Prognostics and Health Management.Piscataway, NJ: IEEE Press, 2011: 1-10. [2] ZHOU K, WANG L X, TAN X S.Flying qualities reduction of fly-by-wire commercial aircraft with reconfiguration flight control laws[J].Procedia Engineering, 2011, 17:179-196. doi: 10.1016/j.proeng.2011.10.021 [3] WANG L, WU C X, SUN R S.An analysis of flight quick access recorder(QAR) data and its applications in preventing landing incidents[J].Reliability Engineering and System Safety, 2014, 127:86-96. doi: 10.1016/j.ress.2014.03.013 [4] 张玉叶, 王颖颖, 王春歆, 等.分析参数相关和时序特征的飞行动作识别方法[J].计算机工程与应用, 2016, 52(5):246-249. doi: 10.3778/j.issn.1002-8331.1403-0283ZHANG Y Y, WANG Y Y, WANG C X, et al.Acrobatic maneuver reorganization method compared with parameters relevance and feature of sequence change[J].Computer Engineering and Applications, 2016, 52(5):246-249(in Chinese). doi: 10.3778/j.issn.1002-8331.1403-0283 [5] 沈一超, 倪世宏, 张鹏.基于贝叶斯网络的飞行动作识别方法[J].计算机工程与应用, 2017, 53(24):161-167. doi: 10.3778/j.issn.1002-8331.1707-0156SHEN Y C, NI S H, ZHANG P.Flight action recognition method based on Bayesian network[J].Computer Engineering and Applications, 2017, 53(24):161-167(in Chinese). doi: 10.3778/j.issn.1002-8331.1707-0156 [6] HOLMBERG J, LEONARD J, KING D, et al.Flying qualities specifications and design standards for unmanned air vehicles[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit.Reston, VA: AIAA, 2008: 1-14. [7] COTTING C M.An initial study to categorize unmanned aerial vehicles for flying qualities evaluation[C]//AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition.Reston, VA: AIAA, 2009: 1-12. [8] 刘莉雯, 张天伟, 茹斌.多参数融合的飞行品质评估模型的建立[J].计算机工程与科学, 2016, 38(6):1262-1268. doi: 10.3969/j.issn.1007-130X.2016.06.030LIU L W, ZHANG T W, RU B.A flying qualities assessment model based on multi-parameter integration[J].Computer Engineering and Science, 2016, 38(6):1262-1268(in Chinese). doi: 10.3969/j.issn.1007-130X.2016.06.030 [9] 张龙, 徐开俊.采用模糊逻辑理论的飞行操纵品质评估模型[J].中国民航飞行学院学报, 2016, 27(5):9-13. doi: 10.3969/j.issn.1009-4288.2016.05.002ZHANG L, XU K J.Flight operation quality assessment model using fuzzy logic theory[J].Journal of Civil Aviation Flight University of China, 2016, 27(5):9-13(in Chinese). doi: 10.3969/j.issn.1009-4288.2016.05.002 [10] 柳忠起, 袁修干, 樊瑜波.基于BP神经网络的飞行绩效评价模型[J].北京航空航天大学学报, 2010, 36(4):403-406. https://bhxb.buaa.edu.cn/CN/abstract/abstract8467.shtmlLIU Z Q, YUAN X G, FAN Y B.Pilot performance evaluation model based on BP neural networks[J].Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(4):403-406(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract8467.shtml [11] 夏长俊, 孙校书, 李冰.基于飞行数据的无人机平飞质量分析方法[J].海军航空工程学院学报, 2017, 32(5):478-482. http://d.old.wanfangdata.com.cn/Periodical/hjhkgcxyxb201705012XIA C J, SUN X S, LI B.Analysis method of UAV level flight quality based on flight data[J].Journal of Naval Aeronautical and Astronautical University, 2017, 32(5):478-482(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hjhkgcxyxb201705012 [12] 彭阳, 彭晓明.一种无人机飞行动作质量分析方法[J].飞行力学, 2017, 35(6):65-69. doi: 10.3969/j.issn.1002-0853.2017.06.015PENG Y, PENG X M.A flight maneuver quality evaluation method for UAVs[J].Flight Dynamics, 2017, 35(6):65-69(in Chinese). doi: 10.3969/j.issn.1002-0853.2017.06.015 [13] ZHOU S H, QIAN S L, QIAO X D, et al.The UAV landing quality evaluation research based on combined weight and VIKOR algorithm[J].Wireless Personal Communications, 2018, 102(2):2047-2062. doi: 10.1007/s11277-018-5254-z [14] 杨俊, 谢寿生.基于模糊支持向量机的飞机飞行动作识别[J].航空学报, 2005, 26(6):738-742. doi: 10.3321/j.issn:1000-6893.2005.06.016YANG J, XIE S S.Fuzzy support vector machines based recognition for aero-plane flight action[J].Acta Aeronautica et Astronautica Sinica, 2005, 26(6):738-742(in Chinese). doi: 10.3321/j.issn:1000-6893.2005.06.016 [15] SHARP C S, SHAKERNIA O, SASTRY S S.A vision system for landing an unmanned aerial vehicle[C]//Proceedings of the 2001 IEEE International Conference on Robotics & Automation.Piscataway, NJ: IEEE Press, 2001: 1720-1727. [16] 李樾, 陈清阳, 侯中喜.自适应引导长度的无人机航迹跟踪方法[J].北京航空航天大学学报, 2017, 43(7):1481-1490. https://bhxb.buaa.edu.cn/CN/abstract/abstract14109.shtmlLI Y, CHEN Q Y, HOU Z X.Path following method with adaptive guidance length for unmanned aerial vehicles[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(7):1481-1490(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract14109.shtml [17] LIU W, ZHENG W A.Stochastic volatility model and technical analysis of stock price[J].Acta Mathematica Sinica, English Series, 2011, 27(7):1283-1296. doi: 10.1007/s10114-011-9468-1 [18] 王玉伟, 高永.基于稳健回归算法的无人机数据预处理技术研究[J].舰船电子工程, 2018, 38(11):38-41. doi: 10.3969/j.issn.1672-9730.2018.11.011WANG Y W, GAO Y.Research on UAV data preprocessing technology based on robust regression algorithm[J].Ship Electronic Engineering, 2018, 38(11):38-41(in Chinese). doi: 10.3969/j.issn.1672-9730.2018.11.011 -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 1037
- HTML全文浏览量: 102
- PDF下载量: 520
- 被引次数: 0
