



-
摘要:
为了提高滑翔再入飞行器响应动态任务的能力并提高其制导系统的鲁棒性,建立了高超声速滑翔再入轨迹规划问题的一种在线求解算法。该算法以一列凸子问题来逼近原问题。通过选择以弧长为自变量并引入对数速度代替速度作为状态,使得动力学方程的非线性大为减弱,同时使动压和热流约束完全成为线性约束。通过使用类似于混合整数规划中割平面的思想处理禁飞区约束,尽可能避免了不必要的计算。通过直接以气动系数和大气密度的乘积作为控制量,构造伪线性控制模型,进一步减弱非线性。非凸约束被适当松弛,以保证子问题的可行性。为了避免过度松弛,利用离线给定的高度和速度上下边界估计对应的参数,以加速收敛。以X-33再入任务为例验证了所提算法的有效性。该算法可以以简单的常值函数为初值并在数次迭代后收敛。
Abstract:In order to improve the capability of the glide reentry vehicle to respond to dynamic missions and improve the robustness of its guidance system, an online solving method for hypersonic glide re-entry trajectory planning problem is established. The method approximates the original problem by a series of convex subproblems. By choosing arc length as the independent variable and introducing logarithmic velocity as the state instead of velocity, the nonlinearity of the dynamic equation is greatly reduced, and the dynamic pressure and heat flow constraints completely become linear constraints. No-fly zone constraints are treated by using a cutting plane method like mixed integer programming to avoid unnecessary calculation as much as possible. By taking the product of aerodynamic coefficient and atmospheric density as the control quantity directly, the pseudo-linear control model is constructed to further weaken the nonlinearity. The non-convex constraint is relaxed appropriately to ensure the feasibility of the subproblem. In order to avoid excessive relaxation, the upper and lower boundaries of the given off-line height and speed are used to estimate the corresponding parameters in order to accelerate convergence. The X-33 re-entry task is taken as an example to verify the effectiveness of the method. The method can take simple constant function as initial value and converge after several iterations.
-
表 1 主要任务参数
Table 1. Main task parameters
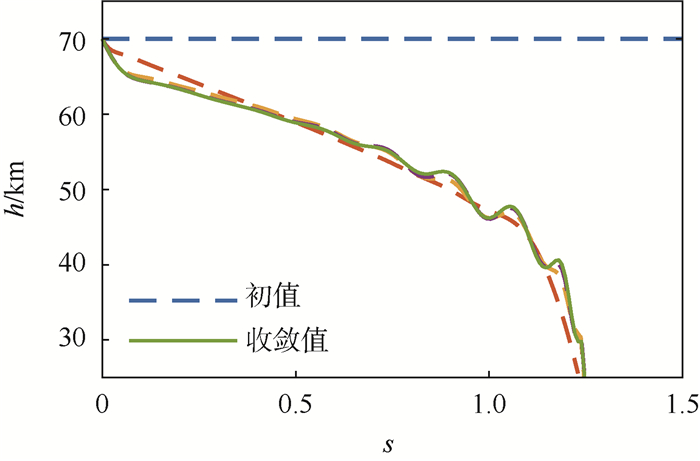
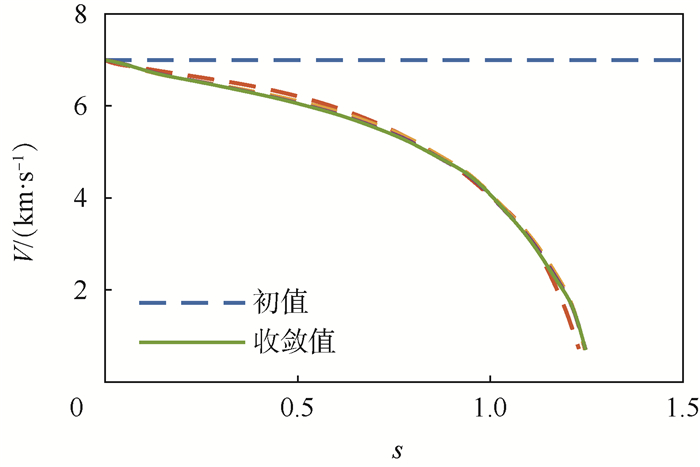
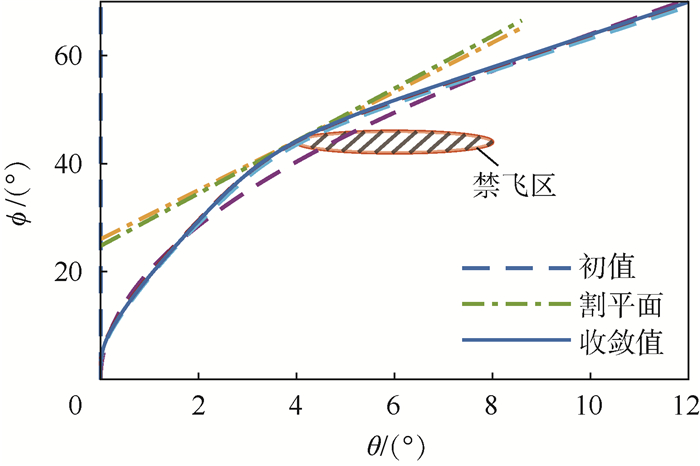
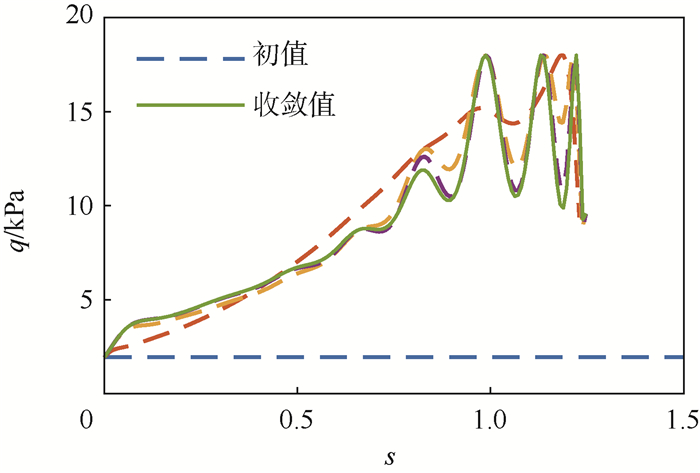
参数 数值 初始高度h0/km 70 初始经度θ0/(°) 0 初始纬度ϕ0/(°) 0 初始速度V0/(m·s-1) 7 000 初始速度倾角γ0/(°) -1.5 初始航向角ψ0/(°) 0 初始倾侧角σ0/(°) 0 终点高度hf/km 25 终点经度θf/(°) 12 终点纬度ϕf/(°) 70 终点速度Vf/(m·s-1) 700 最大热流 
1 500 最大动压qmax/kPa 18 最大过载nmax/g0 2.5  下载: 导出CSV
下载: 导出CSV
-
[1] ISTRATIE V.Optimal profound entry into atmosphere with minimum heat and constraints: AIAA-2001-4069[R].Reston: AIAA, 2001. [2] BOLLINO K, OPPENHEIMER M, DOMAN D.Optimal guidance command generation and tracking for reusable launch vehicle reentry: AIAA-2006-6691[R].Reston: AIAA, 2006. [3] REA J.Launch vehicle trajectory optimization using a Legendre pseudospectral method: AIAA-2003-5640[R].Reston: AIAA, 2003. [4] 黄长强, 国海峰, 丁达理.高超声速滑翔飞行器轨迹优化与制导综述[J].宇航学报, 2014, 35(4):369-379. doi: 10.3873/j.issn.1000-1328.2014.04.001HUANG C Q, GUO H F, DING D L.A survey of trajectory optimization and guidance for hypersonic gliding vehicle[J].Journal of Astronautics, 2014, 35(4):369-379(in Chinese). doi: 10.3873/j.issn.1000-1328.2014.04.001 [5] HARPOLD J C, GAVERT D E.Space shuttle entry guidance performance results[J].Journal of Guidance, Control, and Dynamics, 1983, 6(6):442-447. doi: 10.2514/3.8523 [6] ROENNEKE A J, MARKL A.Re-entry control to a drag-vs-energy profile[J].Journal of Guidance, Control, and Dynamics, 1994, 17(5):916-920. doi: 10.2514/3.21290 [7] LEAVITT J A, MEASE K D.Feasible trajectory generation for atmospheric entry guidance[J].Journal of Guidance, Control, and Dynamics, 2007, 30(2):473-481. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bf7e368091bb0043434c987a691d5ca5 [8] 李昭莹, 黄兴李, 李惠峰.基于闭环解析解的可重复使用运载器轨迹在线生成方法[J].宇航学报, 2013, 34(6):755-762. doi: 10.3873/j.issn.1000-1328.2013.06.003LI Z Y, HUANG X L, LI H F.On-line trajectory generation method based on closed-form analytical solution for reusable launch vehicle[J].Journal of Astronautics, 2013, 34(6):755-762(in Chinese). doi: 10.3873/j.issn.1000-1328.2013.06.003 [9] 胡锦川, 张晶, 陈万春.高超声速飞行器平稳滑翔弹道解析解及其应用[J].北京航空航天大学学报, 2016, 42(5):961-968. doi: 10.13700/j.bh.1001-5965.2015.0330HU J C, ZHANG J, CHEN W C.Analytical solutions of steady glide trajectory for hypersonic vehicle and planning application[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(5):961-968(in Chinese). doi: 10.13700/j.bh.1001-5965.2015.0330 [10] BOYD S, VANDENBERGHE L.Convex optimization[M].Cambridge:Cambridge University Press, 2004:157-160. [11] NESTEROV Y, NEMIROVSKII A.Interior-point polynomial algorithms in convex programming[M].Philadelphia:Society for Industrial and Applied Mathematics Press, 1994:102-137. [12] LIU X, SHEN Z, LU P.Entry trajectory optimization by second-order cone programming[J].Journal of Guidance, Control, and Dynamics, 2016, 39(2):227-241. http://cn.bing.com/academic/profile?id=fea41f0e6900ce265610ac77b34fc2a4&encoded=0&v=paper_preview&mkt=zh-cn [13] WANG Z, GRANT M J.Constrained trajectory optimization for planetary entry via sequential convex programming: AIAA-2016-3241[R].Reston: AIAA, 2016. [14] BALAS E, CERIA S, CORNUÉJOLS G.A lift-and-project cutting plane algorithm for mixed 0-1 programs[J].Mathematical Programming, 1993, 58(1-3):295-324. doi: 10.1007/BF01581273 [15] MARCHAND H, MARTIN A, WEISMANTEL R, et al.Cutting planes in integer and mixed integer programming[J].Discrete Applied Mathematics, 2002, 123(1-3):397-446. doi: 10.1016/S0166-218X(01)00348-1 [16] TOMÁS-RODRÍGUEZ M, BANKS S P.Linear, time-varying approximations to nonlinear dynamical systems:With applications in control and optimization[M].Berlin:Springer, 2010:112-131. [17] BANKS S P, DINESH K.Approximate optimal control and stability of nonlinear finite-and infinite-dimensional systems[J].Annals of Operations Research, 2000, 98:19-44. doi: 10.1023/A:1019279617898 [18] LOFBERG J.YALMIP: A toolbox for modeling and optimization in MATLAB[C]//2004 IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2004: 284-289. [19] ANDERSEN E D, ANDERSEN K D.The MOSEK interior point optimizer for linear programming: An implementation of the homogeneous algorithm[M]//HANS F, KEES R, TAMÁS T.High performance optimization.Berlin: Springer, 2000: 197-232. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 796
- HTML全文浏览量: 245
- PDF下载量: 265
- 被引次数: 0
