



-
摘要:
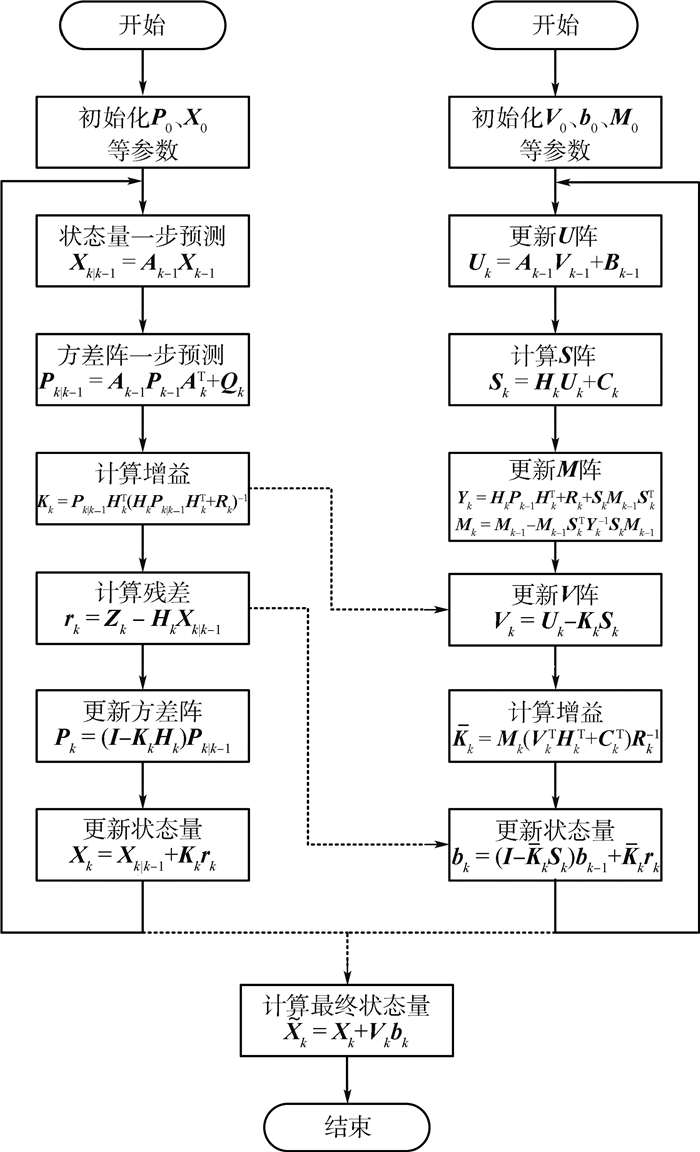
为提高脉冲星方位误差估计对方位自行速度及卫星位置误差的鲁棒性和整体运算的高效性,设计了两级卡尔曼滤波(TSKF)算法。首先,分析了方位自行速度及卫星位置误差对方位误差估计的影响,并分别结合相关算法进行了仿真验证。然后,结合方位误差估计的CV模型和两级卡尔量滤波的相关原理,写出了TSKF算法的更新方程,并分析了实现并行计算的基本流程。仿真实验的数据显示:在方位自行速度及卫星位置误差均存在的情况下,TSKF算法的方位估计精度约为0.1 mas,方位自行速度估计精度约为1.1 mas/a;与基于CV模型的估计算法相比,TSKF算法的浮点运算仅增加了0.048%。
Abstract:In order to improve the robustness of the pulsar position error estimation to the proper motion and satellite position error and the efficiency of the overall algorithm, a two-stage Kalman filter (TSKF) algorithm is designed. Firstly, the influences of pulsar proper motion and satellite position error on pulsar error estimation are analyzed, and the simulation results are verified by combining relevant algorithms. Secondly, based on the CV model and the principle of two-stage Kalman filter, the update equations of TSKF algorithm are derived, and the basic flow of parallel computing is analyzed. The data of the simulation experiment show that position accuracy of the TSKF algorithm is about 0.1 mas and corresponding proper motion accuracy is about 1.1 mas/a in the case of both proper motion and satellite position error. Compared with the estimation algorithm based on CV model, the floating point operation of TSKF algorithm only increases by 0.048%.
-
Key words:
- position error /
- proper motion /
- satellite position error /
- Kalman filter /
- two-stage filter
-

图 3 不同条件下增广算法仿真结果
Figure 3. Simulation results of augmented algorithm under different conditions

图 4 卫星位置误差对估计算法的影响原理
Figure 4. Principle of influence of satellite position error on estimation algorithm

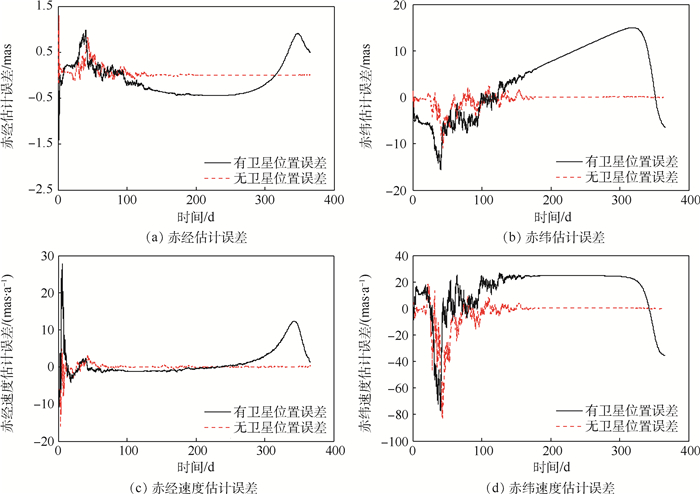
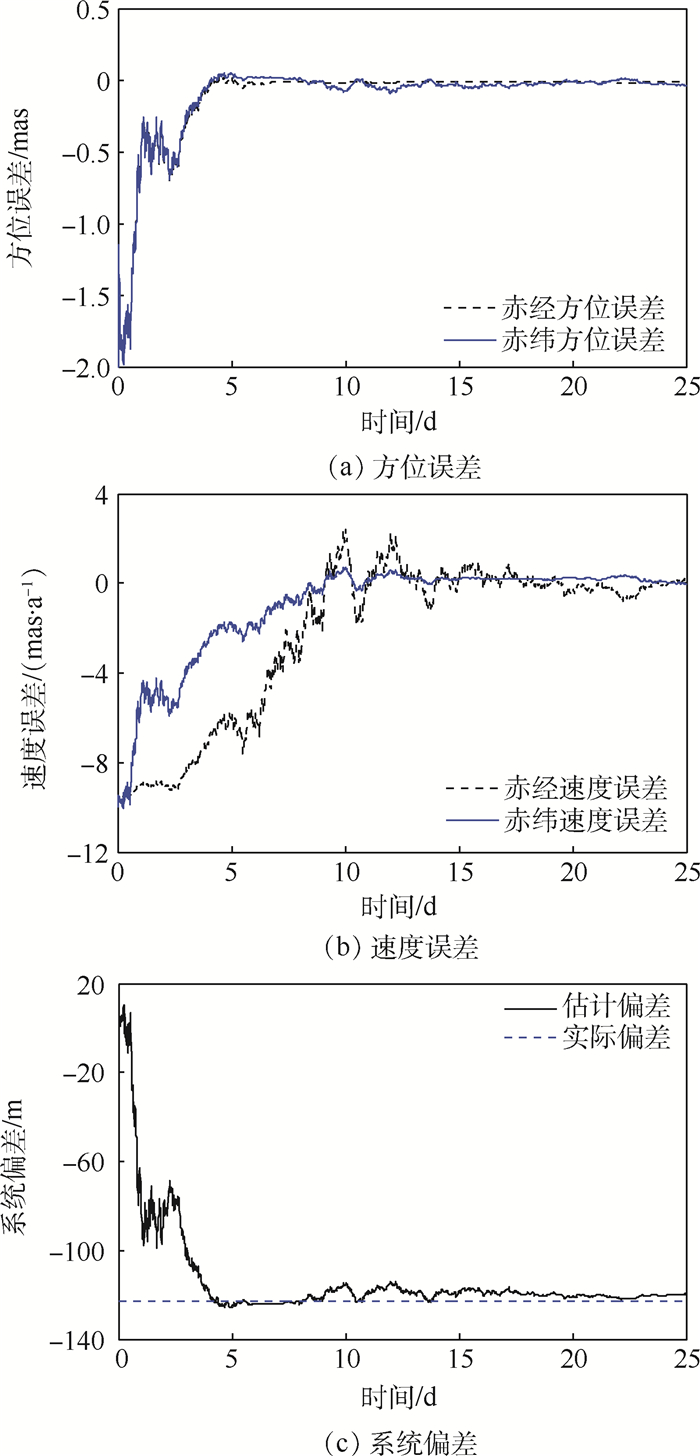
图 5 不同条件下基于CV模型的估计算法仿真结果
Figure 5. Simulation results of estimation algorithm based on CV model under different conditions

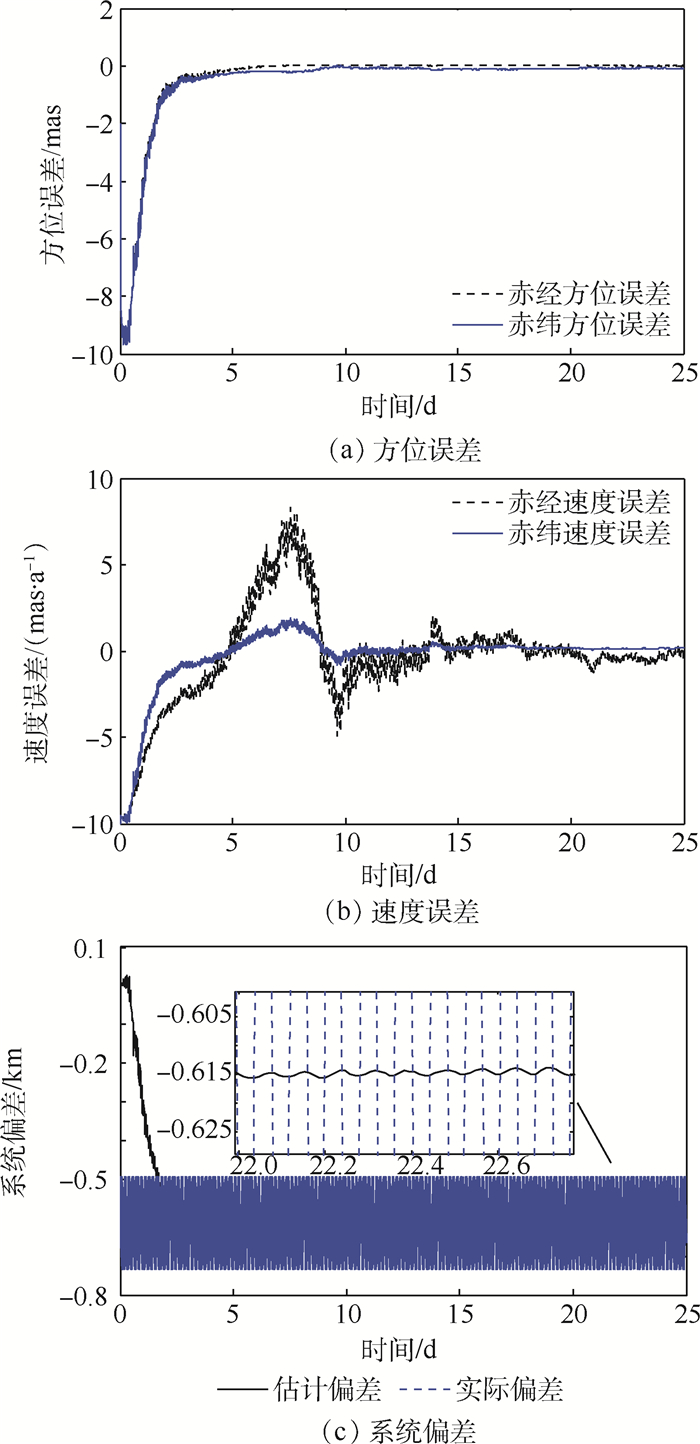
图 8 卫星位置误差周期变化时TSKF算法仿真结果
Figure 8. Simulation results of TSKF algorithm when satellite position error period changes
表 1 脉冲星B1821-24参数
Table 1. Parameters of pulsar B1821-24
参数 数值 赤经/(°) 276.13 赤纬/(°) -24.87 距离/(1020m) 1.694 脉冲周期P/(10-3s) 3.045 脉冲宽度W/(10-5s) 5.5 光子流量Fx/(10-4ph·(cm2·s)-1) 1.93 脉冲辐射流量与平均辐射流量之比Pf/% 98  下载: 导出CSV
下载: 导出CSV
表 2 仿真条件设置
Table 2. Simulation condition setup
实验编号 方位自行速度/
(mas·a-1)卫星位置误差/m 1 (0, 0) (100, 100, 100) 2 (10, 10) (0, 0, 0) 3 (-10, 10) (100, 100, 100) 4 (20, 20) (100, 100, 100) 5 (10, 10) (100, -100, 100) 6 (10, 10) (500, 500, 500)
下载: 导出CSV
表 3 仿真结果统计
Table 3. Simulation result statistics
实验编号 方位误差/mas 速度误差/(mas·a-1) 赤经 赤纬 赤经 赤纬 1 -0.003 9 -0.005 8 0.016 9 0.201 2 2 0.004 9 -0.024 6 -0.003 6 -0.542 9 3 0.024 1 -0.106 4 0.254 6 -1.013 5 4 0.004 9 0.014 3 -0.159 6 0.116 7 5 -0.005 6 0.092 9 -0.103 4 1.081 4 6 -0.001 6 -0.113 8 0.020 8 0.142 7
下载: 导出CSV
表 4 卫星位置误差周期变化时仿真结果统计
Table 4. Simulation result statistics when satellite position error period changes
实验条件/m 方位误差/mas 速度误差/(mas·a-1) Lx Ly Lz 赤经 赤纬 赤经 赤纬 100 100 100 0.015 1 -0.077 6 -0.085 6 0.153 0 200 200 200 -0.016 6 -0.121 9 -0.025 2 0.059 7 300 300 300 -0.020 5 -0.132 4 -0.047 3 0.103 7 100 200 300 -0.008 3 -0.138 5 -0.059 4 0.126 7 300 200 100 0.015 4 -0.075 5 -0.051 4 0.092 8
下载: 导出CSV
-
[1] GRAVEN P, COLLINS J, SHEIKH S, et al.XNAV for deep space navigation[J].Advances in the Astronautical Sciences, 2008, 131:349-364. [2] SHEIKH S I, HELLINGS R W, MATZNER R A.High-order pulsar timing for navigation[C]//Proceedings of Annual Meeting of the Institute of Navigation.Manassas: Institute of Navigation, 2007: 432-443. [3] YOU S, WANG H, HE Y, et al.Pulsar profile construction based on double-redundant-dictionary and same-scale L1-norm compressed sensing[J].Optik, 2018, 164:617-623. doi: 10.1016/j.ijleo.2018.03.066 [4] TAO A, HONG X Y, ZHENG W M, et al.Space very long baseline interferometry in China[J].Advances in Space Research, 2020, 65(2):850-855. doi: 10.1016/j.asr.2019.03.030 [5] WAJIMA K, HAGIWARA Y, TAO A, et al.The East-Asian VLBI network[J].Physics, 2015, 502:403-413. http://d.old.wanfangdata.com.cn/OAPaper/oai_arXiv.org_1311.3431 [6] NING X, GUI M, FANG J, et al.Differential X-ray pulsar aided celestial navigation for Mars exploration[J].Aerospace Science & Technology, 2017, 62:36-45. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=f49a60e0267b8e11f7b03dcbac2bf3a0 [7] XU Q, WANG H, FENG L, et al.An improved augmented X-ray pulsar navigation algorithm based on the norm of pulsar direction error[J].Advances in Space Research, 2018, 62(11):3187-3198. doi: 10.1016/j.asr.2018.08.026 [8] 孙守明, 郑伟, 汤国建.X射线脉冲星星表方位误差估计算法研究[J].飞行器测控学报, 2010, 29(2):57-60. http://d.old.wanfangdata.com.cn/Periodical/fxqckxb201002013SUN S M, ZHENG W, TANG G J.A new estimation algorithm of the X-ray pulsar position error[J].Journal of Spacecraft TT & CC Technology, 2010, 29(2):57-60(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/fxqckxb201002013 [9] 王宏力, 许强, 由四海, 等.考虑卫星位置误差的增广脉冲星方位误差估计算法[J].国防科技大学学报, 2018, 40(5):177-182. http://d.old.wanfangdata.com.cn/Periodical/gfkjdxxb201805026WANG H L, XU Q, YOU S H, et al.Augmented estimation algorithm for pulsar position error with satellite position error[J].Journal of National University of Defense Technology, 2018, 40(5):177-182(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gfkjdxxb201805026 [10] 孙守明, 郑伟, 汤国建.基于CV模型的X射线脉冲星位置误差估计[J].系统仿真学报, 2010, 22(11):2712-2714. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201011058SUN S M, ZHENG W, TANG G J.Position error estimation of X-ray pulsar based on CV model[J].Journal of System Simulation, 2010, 22(11):2712-2714(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201011058 [11] 孙守明.基于X射线脉冲星的航天器自主导航方法研究[D].长沙: 国防科学技术大学, 2011. http://cdmd.cnki.com.cn/Article/CDMD-90002-2007140905.htmSUN S M.Study on autonomous navigation method of spacecraft based on X-ray pulsar[D].Changsha: National University of Defense Technology, 2011(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-90002-2007140905.htm [12] BOBOLTZ D A, FEY A L, JOHNSTON K J, et al.Astrometric positions and proper motions of 19 radio stars[J].Astronomical Journal, 2003, 126(1):484-493. doi: 10.1086/375462 [13] MANCHESTER R N, HOBBS G B, TEOH A, et al.The australia telescope national facility pulsar catalogue[J].Astronomical Journal, 2005, 129(4):1993-2006. doi: 10.1086/428488 [14] 许强, 王宏力, 何贻洋, 等.基于截断误差的改进脉冲星导航观测方程[J].北京航空航天大学学报, 2018, 44(9):1974-1981. http://d.old.wanfangdata.com.cn/Periodical/bjhkhtdxxb201809021XU Q, WANG H L, HE Y Y, et al.Improved pulsar navigation measurement equation based on truncation errors[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(9):1974-1981(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/bjhkhtdxxb201809021 [15] FRIEDLAND B.Treatment of bias in recursive filtering[J].IEEE Transactions on Automatic Control, 1969, AC-14(4):359-367. doi: 10.1109-TAC.1969.1099223/ [16] HSIEH C S, CHEN F C.General two-stage Kalman filters[J].IEEE Transactions on Automatic Control, 2000, 45(4):819-824. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ026357299/ -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 635
- HTML全文浏览量: 81
- PDF下载量: 260
- 被引次数: 0
