



High-precision geomagnetic reference map construction method based on compressed sensing
-
摘要:
地磁基准图的构建是实现地磁匹配导航的基石。针对实测数据量较小时利用插值法构建的地磁基准图精度不理想的问题,将压缩感知理论应用到地磁信息采集中。结合地磁基准图的结构特点设计了以离散余弦变换作为稀疏基、单位矩阵作为观测矩阵,以压缩采样匹配追踪(CoSaMP)算法作为重构算法的基于压缩感知的高精度地磁基准图构建方法,并与三次样条插值、Kriging插值及PSO-Kriging插值法进行对比。实验结果表明:所提方法具有较高的重构精度和稳定性,与性能最好的PSO-Kriging插值法相比,在6.25%采样率下重构地磁基准图,所提方法使得峰值信噪比(PSNR)由66.97 dB提高至74.67 dB,绝对误差由25.47 nT减小至10.26 nT,均方根误差由28.57 nT减小至11.33 nT。
Abstract:The construction of geomagnetic reference map is the cornerstone of geomagnetic matching navigation.In this paper, the compressed sensing theory is applied to the geomagnetic information acquisition, which aims at solving the problem that the accuracy of the geomagnetic reference map is not satisfactory with the less measured data based on interpolation methods.A high-precision method of geomagnetic reference map construction based on compressed sensing is put forward, taking the structural characteristics of the geomagnetic reference map into consideration. The discrete cosine transform matrix is used as sparse basis, the unit matrix is used as measurement matrix, and the compression sampling matching pursuit (CoSaMP) algorithm is used as the reconstruction method. The experimental results show that the proposedmethod has better reconstruction accuracy and stability compared withthe methods of cubic spline interpolation, Kriging interpolation and PSO-Kriging interpolation. Compared with the PSO-Kriging interpolation method which has the best performance among the three, when geomagnetic reference map is reconstructed at the sampling rate of 6.25%, the proposed method makes the peak signal-to-noise ratio (PSNR) increase from 66.97 dB to 74.67 dB, themeanabsolute error reduce from 25.47 nT to 10.26 nT, and the root mean square error decrease from 28.57 nT to 11.33nT.
-

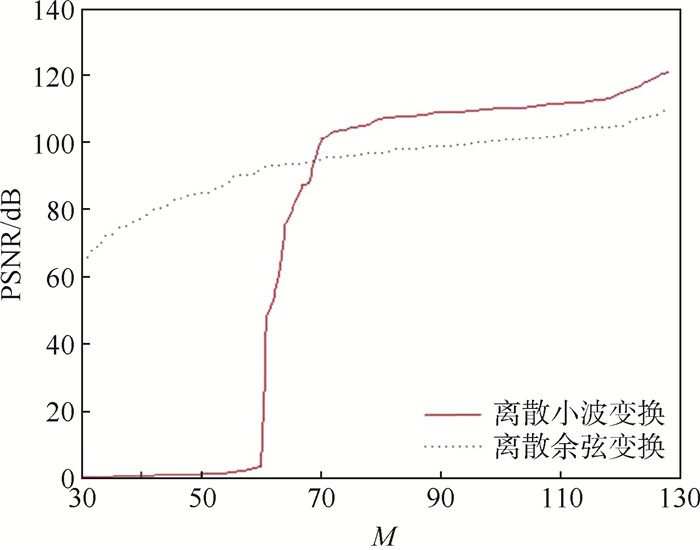
图 2 离散小波变换和离散余弦变换重建效果随观测矩阵维度的变化
Figure 2. Variation of reconstruction effect of discrete wavelet transform and discrete cosine transform with dimension of measurement matrix

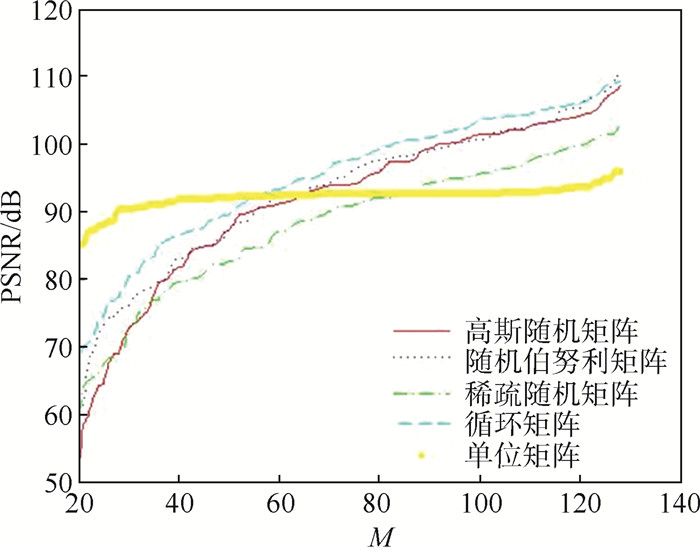
图 3 不同观测矩阵重建效果随观测矩阵维度的变化
Figure 3. Variation of reconstruction effect with dimension of matrix for different measurement matrices

图 5 Kriging插值法和压缩感知重构效果对比
Figure 5. Comparison of Kriging interpolation method and compressed sensing reconstruction effect
表 1 不同观测矩阵重建100次PSNR标准差
Table 1. PSNR standard deviation of 100 times reconstruction for different measurement matrices
dB 观测矩阵 PSNR标准差 高斯随机矩阵 4.9845 随机伯努利矩阵 4.8488 稀疏随机矩阵 5.3112 循环矩阵 4.5170 单位矩阵 0  下载: 导出CSV
下载: 导出CSV
表 2 不同重建算法结果
Table 2. Results of different reconstruction algorithms
dB 重建算法 PSNR值 CoSaMP 91.45 MP 88.33 OMP 90.12 StOMP 90.66
下载: 导出CSV
表 3 不同采样率下各方案构建基准图的PSNR值
Table 3. PSNR values of reference map reconstructed by different schemes at different sampling rates
采样率/% PSNR/dB 压缩感知 三次样条插值 Kriging插值 PSO-Kriging插值 25 88.2135 84.5327 86.4336 86.8971 18.75 83.4127 79.1009 81.3121 81.6743 12.5 78.3155 70.4422 72.4561 74.7963 6.25 74.6714 60.5773 64.3352 66.9712
下载: 导出CSV
表 4 采样率下各性能指标数据
Table 4. Performance index data at 25% sampling rate
nT 构建方法 绝对误差 均方根误差 标准差 压缩感知 0.5978 0.6119 0.6743 三次样条插值 2.4533 3.2121 3.2156 Kriging插值 2.2002 3.0117 3.1189 PSO-Kriging插值 2.0524 2.3768 2.5143
下载: 导出CSV
表 5 18.75%采样率下各性能指标数据
Table 5. Performance index data at 18.75% sampling rate
nT 构建方法 绝对误差 均方根误差 标准差 压缩感知 3.1033 3.4561 3.4788 三次样条插值 6.2455 7.5371 7.6133 Kriging插值 5.6413 6.4745 6.2531 PSO-Kriging插值 5.0177 5.7874 5.8125
下载: 导出CSV
表 6 12.5%采样率下各性能指标数据
Table 6. Performance index data at 12.5% sampling rate
nT 构建方法 绝对误差 均方根误差 标准差 压缩感知 5.4177 6.0133 6.3145 三次样条插值 18.7133 24.9103 25.3174 Kriging插值 11.9773 15.6245 15.6711 PSO-Kriging插值 11.3144 14.5178 14.6477
下载: 导出CSV
表 7 6.25%采样率下各性能指标数据
Table 7. Performance index data at 6.25% sampling rate
nT 构建方法 绝对误差 均方根误差 标准差 压缩感知 10.2563 11.3313 11.8847 三次样条插值 37.3318 41.6547 41.7734 Kriging插值 26.8891 30.3671 31.2155 PSO-Kriging插值 25.4731 28.5717 29.0973
下载: 导出CSV
-
[1] GOLDENBERG F. Geomagnetic navigation beyond the magnetic compass[C]//Position, Location, & Navigation Symposium.Piscataway, NJ: IEEE Press, 2006: 684-694. [2] FOX S M, PAL P K, PSIAKI M L.Magnetometer-based autonomous satellite navigation(MAGNAV)[C]//Proceedings of the Annual Rocky Mountain Guidance and Control Conference.Washington, D.C.: American Astronautical Society, 1990: 369-382. [3] 蔡洪, 郭才发, 胡正东.惯性/地磁组合导航算法[J].中国惯性技术学报, 2009, 17(3):333-337. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201806014CAI H, GUO C F, HU Z D.Algorithms for inertial/geomagnetic integrated navigation[J].Journal of Chinese Inertial Technology, 2009, 17(3):333-337(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201806014 [4] CHEON Y J.Fast convergence of orbit determination using geomagnetic field measurement in target pointing satellite[J].Aerospace Science and Technology, 2013, 30(1):315-322. doi: 10.1016/j.ast.2013.08.016 [5] 王哲, 王仕成, 张金生, 等.一种地磁匹配制导基准图构建方法及其有效性评价[J].系统工程与电子技术, 2008, 30(11):2207-2211. doi: 10.3321/j.issn:1001-506X.2008.11.041WANG Z, WANG S C, ZHANG J S, et al.Method for preparation of reference map in geomagnetism matching guidance and its validity evaluation[J].Systems Engineering and Electronics, 2008, 30(11):2207-2211(in Chinese). doi: 10.3321/j.issn:1001-506X.2008.11.041 [6] 踪华, 刘嬿, 杨业.地磁导航技术研究现状综述[J].航天控制, 2018, 36(3):94-99 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=htkz201803015ZONG H, LIU Y, YANG Y.Overview of the research status about geomagnetic navigation technology[J].Aerospace Control, 2018, 36(3):94-99(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=htkz201803015 [7] 岳建平, 甄宗坤.基于粒子群算法的Kriging插值在区域地面沉降中的应用[J].测绘通报, 2012(3):59-62. http://d.old.wanfangdata.com.cn/Periodical/chtb201203019YUE J P, ZHEN Z K.Application of particle swarm optimization based Kriging interpolation method in regional land subsidence[J].Bulletin of Surveying and Mapping, 2012(3):59-62(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/chtb201203019 [8] 李晨霖, 王仕成, 张金生, 等.基于改进的Kriging插值方法构建地磁基准图[J].计算机仿真, 2018, 35(12):278-282. http://d.old.wanfangdata.com.cn/Periodical/jsjfz201812062LI C L, WANG S C, ZHANG J S, et al.Construction of geomagnetic datum map based on improved Kriging interpolation method[J].Computer Simulation, 2018, 35(12):278-282(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jsjfz201812062 [9] CANDES E J, ROMBERG J, TAO T.Robust uncertainty principles:Exact signal reconstruction from highly incomplete frequency information[J].IEEE Transactions on Information Theory, 2006, 52(2):489-509. doi: 10.1109/TIT.2005.862083 [10] DONOHO D L.Compressed sensing[J].IEEE Transactions on Information Theory, 2006, 52(4):1289-1306. doi: 10.1109/TIT.2006.871582 [11] DONOHO D L, TSAIGY.Extensions of compressed sensing[J].Signal Processing, 2006, 86(3):533-548. doi: 10.1016/j.sigpro.2005.05.028 [12] FOUCARTS, RAUHUT H.A mathematical introduction to compressive sensing[M].[S.l.]: Birkhauser, 2013: 31-37. [13] THEODORIDIS S, KOPSINIS Y, SLAVAKIS K.Sparsity-aware learning and compressed sensing:Anoverview[J].Mathematics, 2012, 1:1271-1377. http://d.old.wanfangdata.com.cn/NSTLHY/NSTL_HYCC0214117497/ [14] MOHADES M M, MOHADES A, TADAION A.A reed-solomon code based measurement matrix with small coherence[J].IEEE Signal Processing Letters, 2014, 21(7):839-843. doi: 10.1109/LSP.2014.2314281 [15] 吴赟.压缩感知测量矩阵的研究[D].西安: 西安电子科技大学, 2012: 32-46.WU Y.Research on measurement matrix for compressive sensing[D].Xi'an: Xidian University, 2012: 32-46(in Chinese). [16] U.S.Geological Survey.Digital data grids for the magnetic anomaly map of North America: open-file report 02-414[R].Denver: Geological Survey, 2002. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 568
- HTML全文浏览量: 63
- PDF下载量: 142
- 被引次数: 0
