



-
摘要:
针对无法保证各子阵天线附近均安装高精度子惯性测量单元(IMU)的问题,提出了一种基于最小二乘拟合的分布式位置姿态测量系统(POS)全局估计方法。首先,建立了考虑一维柔性变形角的主/子传递对准误差模型;然后,采用卡尔曼滤波(KF)估计已安装子IMU的子阵天线运动参数;最后,在已获取运动参数的基础上,采用最小二乘拟合估计未安装子IMU的子阵天线运动参数。半物理仿真实验结果表明,所提方法精确实现了阵列天线运动参数的全局估计,且未安装子IMU的子阵天线运动参数估计精度与相邻的子阵天线运动参数估计精度相当。
-
关键词:
- 惯性测量单元(IMU) /
- 传递对准 /
- 卡尔曼滤波(KF) /
- 最小二乘拟合 /
- 分布式位置姿态测量系统(POS)
Abstract:Aimed at the problem that it is impossible to install high-precision sub-Inertial Measurement Unit (IMU) on every sub-array in engineering practice, a global estimation method based on the least square fitting for distributed Position and Orientation System (POS) is proposed. Firstly, a transfer alignment error model from master system to slave system considering one-dimensional flexibility deformation is built. Secondly, Kalman Filter (KF) is used to estimate motion parameters of array antenna of the sub-arrays with sub-IMUs. Finally, the least square fitting is used to estimate the motion parameters of the sub-arrays without sub-IMU. The semi-physical simulation results show that the proposed method can realize the global estimation of the motion parameters of array antenna, and the estimation precision of the motion parameters of sub-arrays without sub-IMU is almost the same as that of its neighboring sub-arrays.
-

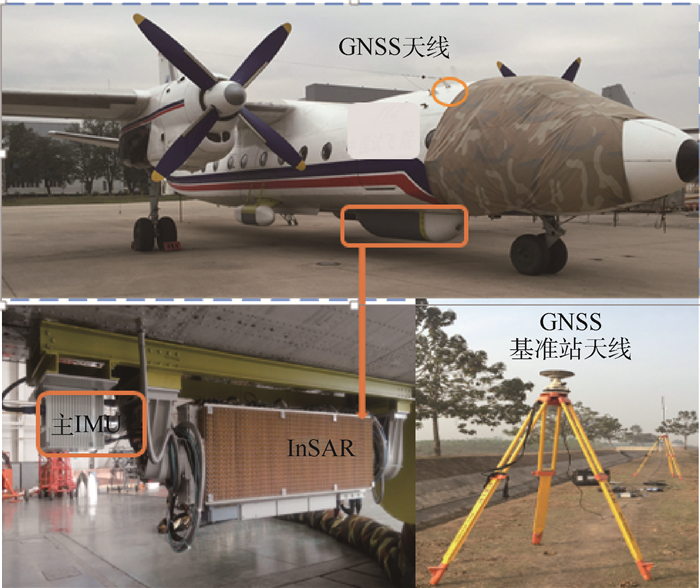
图 1 分布式POS与InSAR联合飞行实验的设备
Figure 1. Flight experiment equipment with distributed POS and InSAR

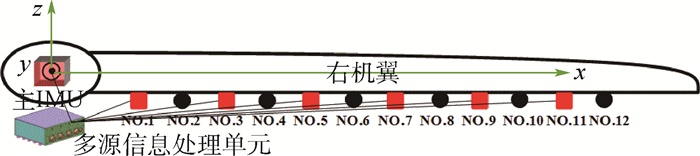
图 2 阵列天线与IMU在一侧机翼的分布示意图
Figure 2. Distribution schematic diagram of array antennas and IMUs on one wing
表 1 阵列天线与IMU在载体坐标系下的坐标
Table 1. Coordinates of array antennas and IMUs in body coordinate
子阵天线 x轴坐标/m No.1 1 No.2 2 No.3 3 No.4 4 No.5 5 No.6 6 No.7 7 No.8 8 No.9 9 No.10 10 No.11 11 No.12 12  下载: 导出CSV
下载: 导出CSV
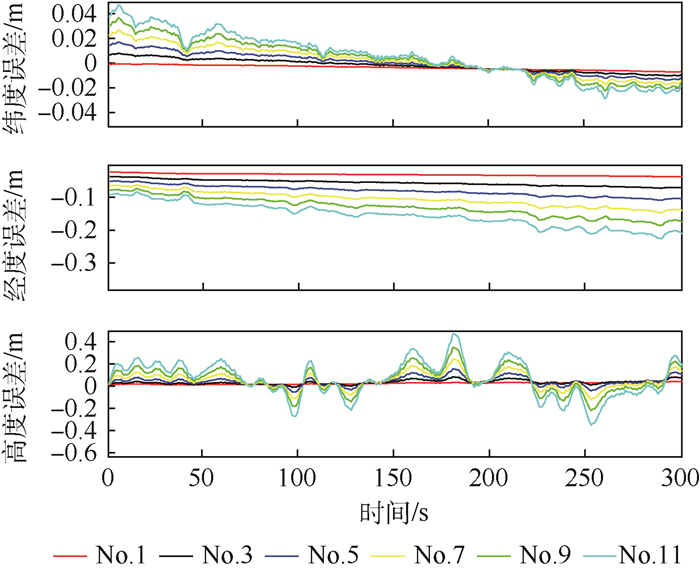
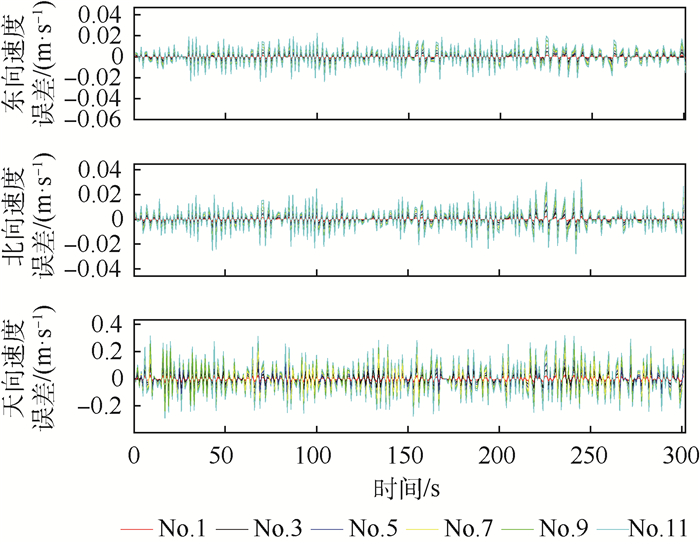
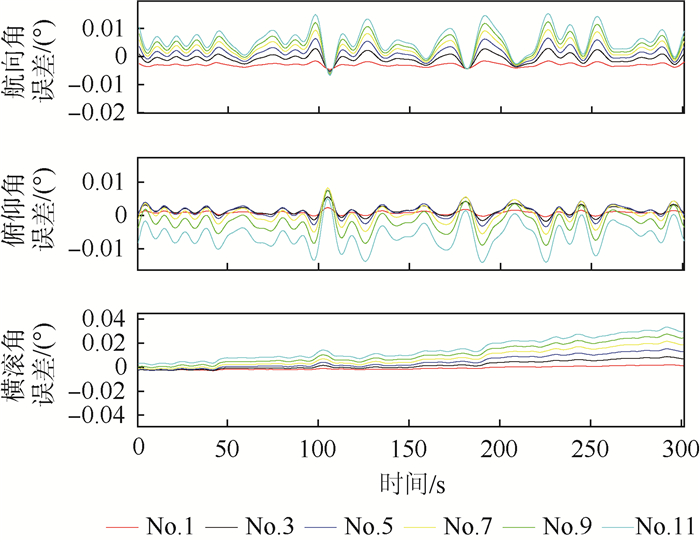
表 2 传递对准估计的子阵天线运动参数误差统计结果
Table 2. Statistical results of sub-antenna motion parameter errors using transfer alignment estimation
运动参数 RMSE No.1 No.3 No.5 No.7 No.9 No.11 纬度/m 0.004 6 0.009 8 0.030 4 0.043 5 0.053 0 0.076 6 经度/m 0.016 0 0.025 0 0.041 8 0.056 6 0.064 7 0.075 7 高度/m 0.015 2 0.029 6 0.032 4 0.040 3 0.051 7 0.069 1 东向速度/(m·s-1) 0.005 0.006 0.008 0.016 2 0.017 5 0.022 0 北向速度/(m·s-1) 0.004 0.006 0.009 0.019 1 0.022 0 0.025 2 天向速度/(m·s-1) 0.003 9 0.006 9 0.012 1 0.018 0 0.023 5 0.026 2 航向角/(°) 0.008 0 0.011 0 0.013 8 0.014 3 0.014 7 0.025 2 俯仰角/(°) 0.001 5 0.002 2 0.002 8 0.003 5 0.004 2 0.004 8 横滚角/(°) 0.001 3 0.002 6 0.002 8 0.003 1 0.004 4 0.004 7
下载: 导出CSV
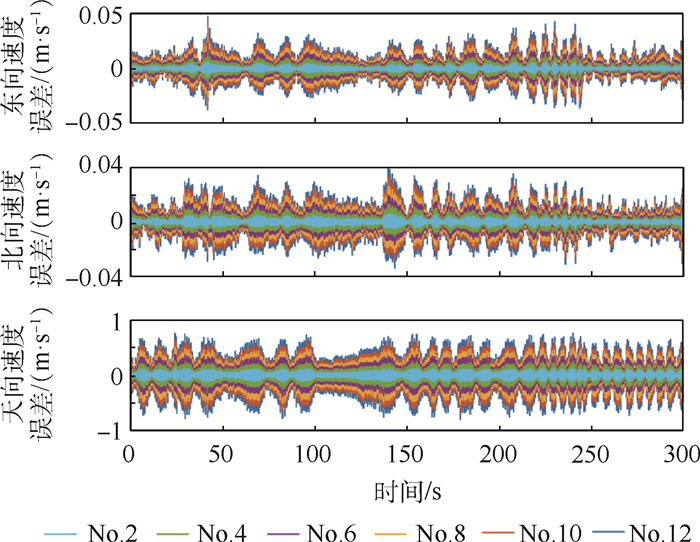
表 3 最小二乘拟合估计的子阵天线运动参数误差统计结果
Table 3. Statistical results of sub-antenna motion parameter errors using least square fitting estimation
参数 RMSE No.2 No.4 No.6 No.8 No.10 No.12 纬度/m 0.055 1 0.023 4 0.038 2 0.050 1 0.065 1 0.081 6 经度/m 0.018 8 0.038 5 0.049 6 0.060 8 0.071 8 0.085 6 高度/m 0.019 9 0.030 7 0.038 5 0.047 9 0.063 7 0.089 5 东向速度/(m·s-1) 0.004 6 0.007 2 0.011 9 0.017 4 0.021 7 0.026 9 北向速度/(m·s-1) 0.005 6 0.007 7 0.001 8 0.020 4 0.023 7 0.027 8 天向速度/(m·s-1) 0.005 1 0.010 4 0.017 2 0.020 6 0.024 4 0.028 2 航向角/(°) 0.009 0 0.013 3 0.014 0 0.016 0 0.023 3 0.028 6 俯仰角/(°) 0.001 9 0.002 4 0.003 3 0.004 0 0.004 4 0.004 8 横滚角/(°) 0.002 1 0.002 5 0.003 1 0.004 3 0.004 6 0.004 9
下载: 导出CSV
-
[1] YE W, LI J L, LI L C.Design and development of a real-time multi-DSPs and FPGA-based DPOS for InSAR applications[J].IEEE Sensors Journal, 2018, 18(8):3419-3425. doi: 10.1109/JSEN.2018.2799622 [2] XU H P, WU Z F, LIU W, et al.Analysis of the effect of interference on InSAR[J].IEEE Sensors Journal, 2015, 15(10):5659-5668. doi: 10.1109/JSEN.2015.2445931 [3] ZHONG M Y, CAO Q, GUO J, et al.Simultaneous lever-arm compensation and disturbance attenuation of POS for a UAV surveying system[J].IEEE Transactions on Instrumentation and Measurement, 2016, 65(12):2828-2839. doi: 10.1109/TIM.2016.2598038 [4] GONG X L, FAN W, FANG J C.An innovational transfer alignment method based on parameter identification UKF for airborne distributed POS[J].Measurement, 2014, 58:103-114. doi: 10.1016/j.measurement.2014.08.034 [5] NASSAR S, EL-SHEIMY N.A combined algorithm of improving INS error modeling and sensor measurements for accurate INS/GPS navigation[J].GPS Solutions, 2006, 10(1):29-39. doi: 10.1007/s10291-005-0149-3 [6] LU Z X, LI J L, FANG J C, et al.Adaptive unscented two-filter smoother applied to transfer alignment for ADPOS[J].IEEE Sensors Journal, 2018, 18(8):3410-3418. doi: 10.1109/JSEN.2018.2799211 [7] 宫晓琳, 房建成.一种机载遥感成像用分布式POS传递对准方法[J].北京航空航天大学学报, 2012, 38(4):491-496. https://bhxb.buaa.edu.cn/CN/Y2012/V/I4/491GONG X L, FANG J C.Method of transfer alignment of distributed POS for airborne remote imaging[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(4):491-496(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2012/V/I4/491 [8] 宫晓琳, 秦婷婷.SINS/GPS组合平滑估计在机载SAR实时运动补偿中的应用[J].电子与信息学报, 2014, 36(7):1560-1565. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzkxxk201407006GONG X L, QING T T.Application of smoothing algorithm in SINS/GPS integrated system for airborne SAR real-time motion compensation[J].Journal of Electronics & Information Technology, 2014, 36(7):1560-1565(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dzkxxk201407006 [9] 房建成, 张舟, 宫晓琳.机载分布式POS传递对准建模与仿真[J].中国惯性技术学报, 2012, 20(4): 379-385. doi: 10.3969/j.issn.1005-6734.2012.04.003FANG J C, ZHANG Z, GONG X L.Modeling and simulation of transfer alignment for distributed POS[J].Journal of Chinese Inertial Technology, 2012, 20(4):379-385(in Chinese). doi: 10.3969/j.issn.1005-6734.2012.04.003 [10] 刘锡祥, 徐晓苏.大杆臂条件下传递对准算法的设计与仿真[J].系统仿真学报, 2011, 23(5):1051-1053. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201105043LIU X X, XU X S.Algorithm design and study for long lever-arm size in transfer alignment[J].Journal of System Simulation, 2011, 23(5):1051-1053(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201105043 [11] 解春明, 赵剡, 王纪南.传递对准中机翼弹性变形建模与滤波处理[J].北京航空航天大学学报, 2010, 36(8):931-935. https://bhxb.buaa.edu.cn/CN/Y2010/V36/I8/931XIE C M, ZHAO Y, WANG J N.Modeling of wing flexure and filtering solution in transfer alignment[J].Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(8):931-935(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2010/V36/I8/931 [12] 刘锡祥, 徐晓苏.杆臂效应补偿中H∞误差滤波器的应用与设计[J].东南大学学报(自然科学版), 2009, 39(6):1142-1145. doi: 10.3969/j.issn.1001-0505.2009.06.011LIU X X, XU X S.Application and design of H∞ filter for lever-arm compensation[J].Journal of Southeast University(Natural Science Edition), 2009, 39(6):1142-1145(in Chinese). doi: 10.3969/j.issn.1001-0505.2009.06.011 [13] WU W, CHEN S Q, QIN S Q.Online estimation of ship dynamic flexure model parameters for transfer alignment[J].IEEE Transactions on Control Systems Technology, 2013, 21(5):1666-1678. doi: 10.1109/TCST.2012.2214778 [14] YOLDEMIR A B, SEZGIN M.A least squares approach to buried object detection using ground penetrating radar[J].IEEE Sensors Journal, 2011, 11(6):1337-1341. doi: 10.1109/JSEN.2010.2091500 [15] GONG X L, LIU H J, FANG J C, et al.Multi-node transfer alignment based on mechanics modeling for airborne DPOS[J].IEEE Sensors Journal, 2017, 18(2):669-679. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=cde8c073fdc7ec31c614704bc75e95de -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 691
- HTML全文浏览量: 143
- PDF下载量: 207
- 被引次数: 0
