



-
摘要:
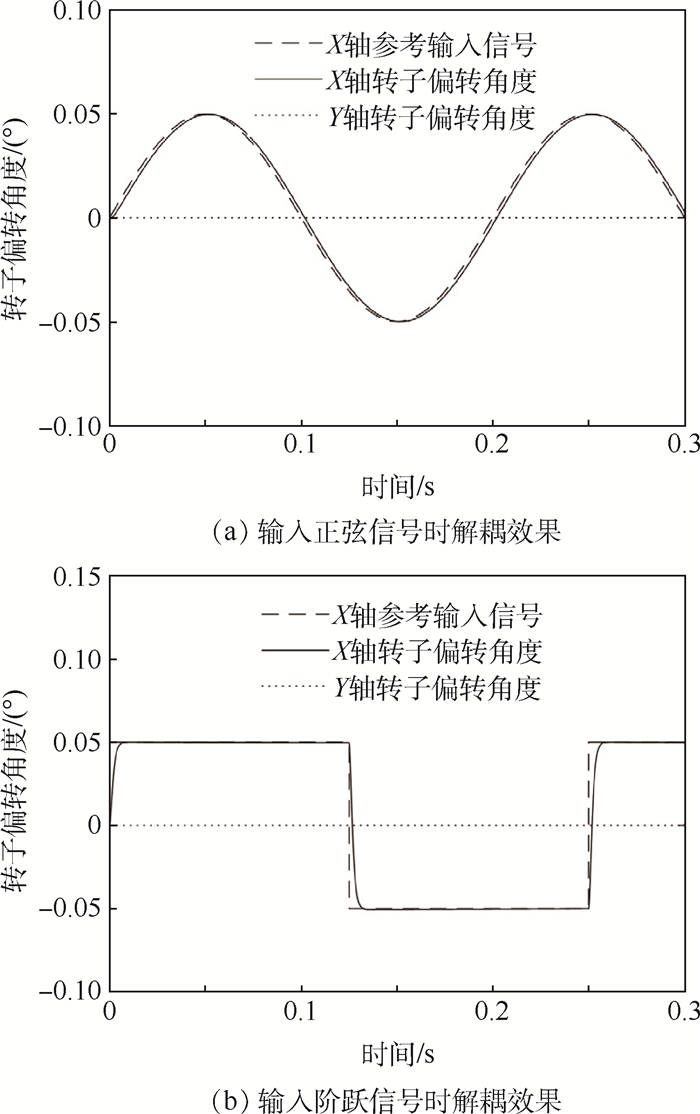
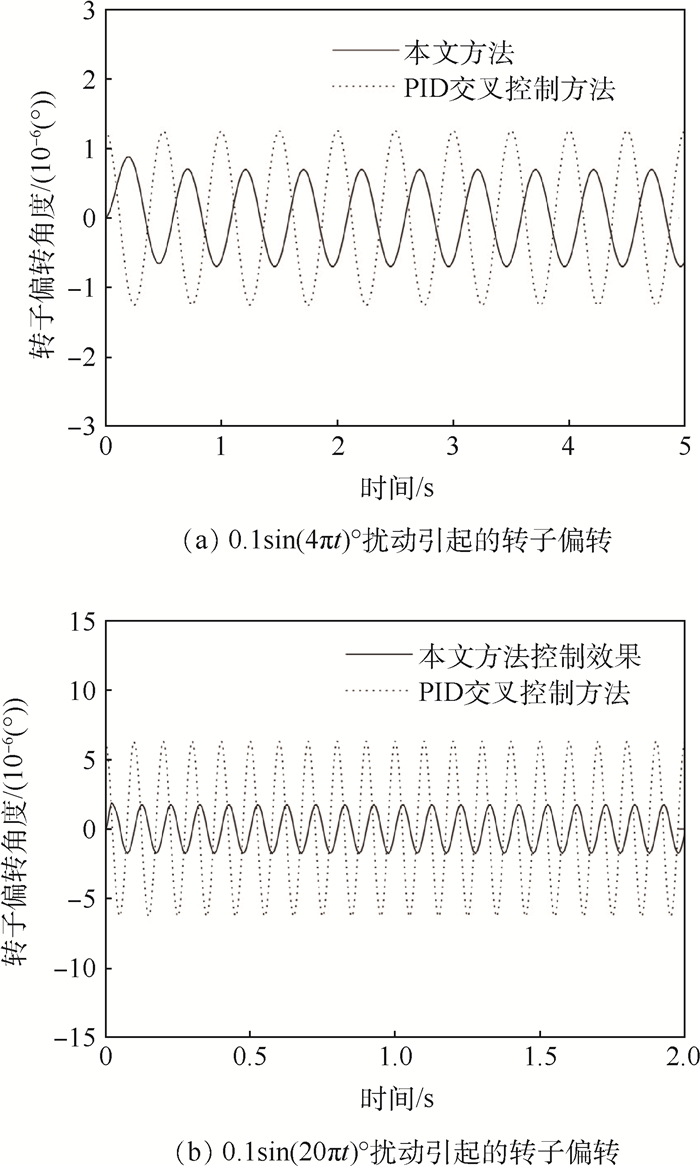
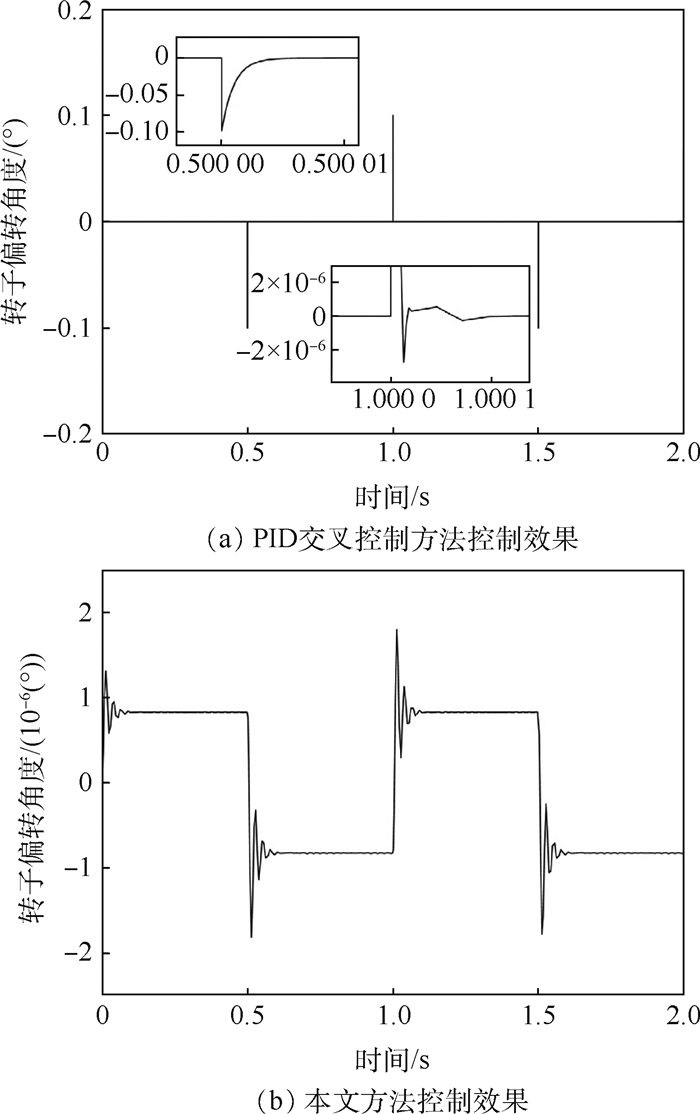
磁悬浮控制力矩陀螺(MSCMG)转子的稳定悬浮是实现陀螺高精度大力矩输出的关键。针对影响转子稳定悬浮的转子径向偏转耦合、非线性参数摄动、动框架效应问题,建立转子的动力学模型,提出了一种基于反馈线性化的增强型内模控制方法。利用反馈线性化方法实现径向偏转运动解耦以及转子动力学模型的线性化,设计增强型内模控制对转子系统的非线性参数摄动进行补偿并有效抑制动框架效应,提升了转子系统的稳定性。MATLAB仿真结果表明:所提出的控制方法实现了转子偏转的完全解耦,与PID控制相比,所提方法可以有效抑制参数摄动对转子径向平动的影响。对于转子径向偏转,与PID交叉控制相比,所提方法可以有效抑制框架扰动,提高系统控制精度。
-
关键词:
- 磁悬浮控制力矩陀螺(MSCMG) /
- 反馈线性化 /
- 增强型内模控制 /
- 动框架效应 /
- 非线性参数摄动
Abstract:The stable suspension of the Magnetically Suspended Control Moment Gyro (MSCMG) rotor is the key to achieve high-precise and large-moment output for gyro. Aimed at the problems of the rotor radial tilt coupling, nonlinear parameter perturbation and moving-gimbal effects that affect the rotor stable suspension, the rotor dynamics model is established and an enhanced internal model control method based on feedback linearization is proposed. The feedback linearization method is used to decouple the radial tilt motion and linearize the rotor dynamics model. The enhanced internal model control is designed to compensate the nonlinear parameter perturbation, suppress moving-gimbal effects and improve stability of the rotor system. MATLAB simulation results show that the proposed control method can decouple rotor tilt motion completely. Compared with the PID control, the proposed method can effectively suppress the influence of parameter perturbation on rotor radial translation. For rotor radial tilt, the proposed method can effectively suppress moving-gimbal effects and improve system control precision compared with PID cross control.
-

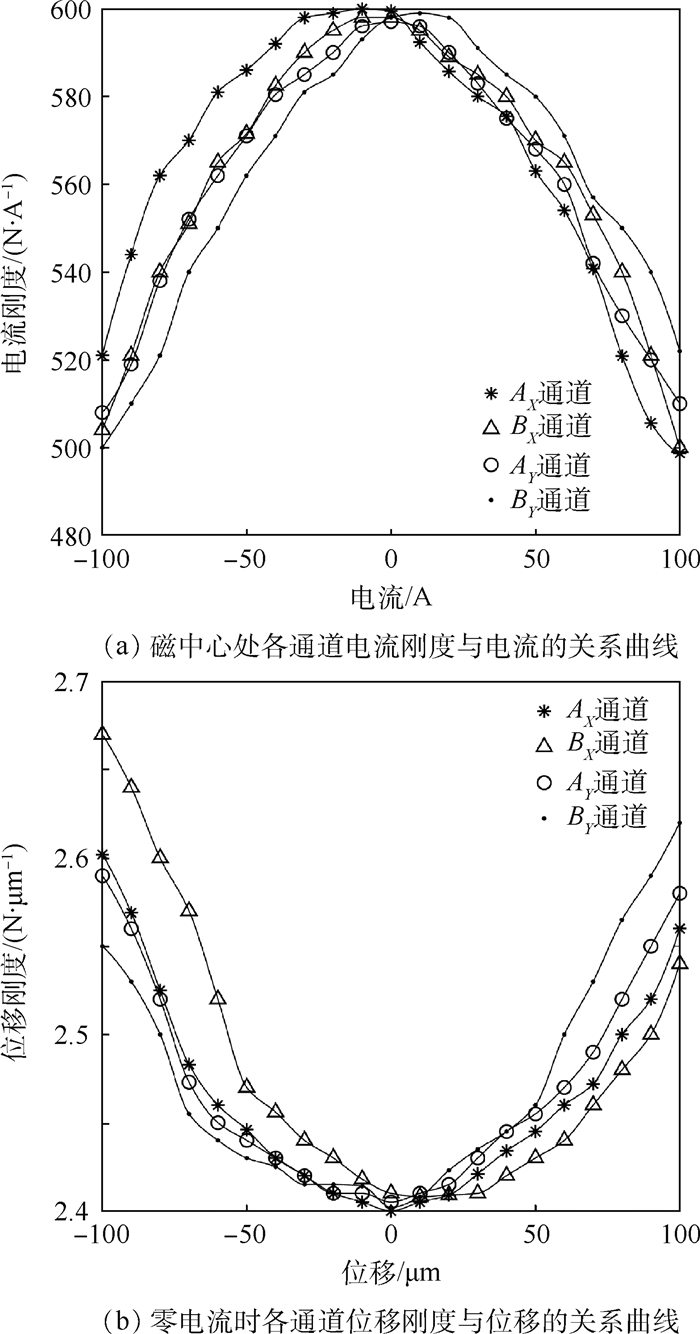
图 3 电流刚度与位移刚度变化曲线
Figure 3. Curves of current stiffness and displacement stiffness variations

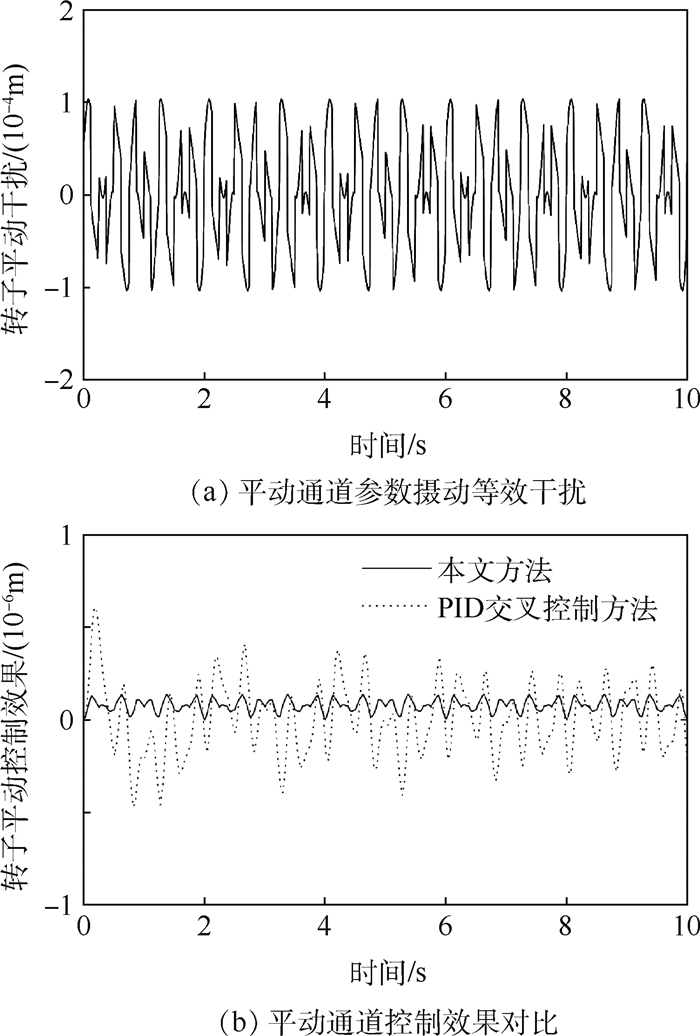
图 7 径向平动抗扰性能对比
Figure 7. Disturbance suppression performance comparison of radial translation motion

图 9 正弦扰动抗扰性能对比
Figure 9. Disturbance suppression performance comparison of sinusoidal disturbance

图 10 阶跃扰动抗扰性能对比
Figure 10. Disturbance suppression performance comparison of step disturbance
表 1 SGMSCMG设计参数
Table 1. Design parameters of SGMSCMG
参数 数值 转子径向转动惯量Jrr/(kg·m2) 0.082 86 转子轴向转动惯量Jrz/(kg·m2) 0.130 2 框架最大角速度 
0.25 框架最大角加速度 
14.137 从磁悬浮转子中心到径向磁轴承中心的距离lm/m 0.072 5 转子的额定转速Ω/(r·min-1) 15 000 磁中心处零电流时电流刚度ki/(N·A-1) 600 零电流时平衡位置处位移刚度kh/(N·μm-1) 2.4 转子质量m/kg 16.7  下载: 导出CSV
下载: 导出CSV
表 2 控制系统仿真参数
Table 2. Simulation parameters of control system
参数 数值 增强型内模控制补偿系数K 100 增强型内模控制滤波器调节参数λ 0.001 PID控制器中比例系数Kp 100 PID控制器中微分系数Kd 12 PID控制器中积分系数Ki 150 交叉环节高通滤波器截止频率ωH/Hz 400 交叉环节低通滤波器截止频率ωL/Hz 80
下载: 导出CSV
-
[1] ZHANG Y, ZHANG J R.Disturbance characteristics analysis of CMG due to imbalances and installation errors[J].IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2):1017-1026. doi: 10.1109/TAES.2013.120543 [2] CHEN X C, CAI Y W, REN Y, et al.Spacecraft vibration suppression based on micro-gimbal moment of magnetically suspended flywheel with dynamic feedback and feedforward decoupling control[J].Proceedings of the Institution of Mechanical Engineers, Part C-Journal of Mechanical Engineering Science, 2018, 232(21):3881-3896. doi: 10.1177/0954406217745339 [3] 任元.大型CMG磁悬浮转子系统高稳定度高精度控制方法及实验研究[D].北京: 北京航空航天大学, 2012: 2-19.REN Y.High-stability and high-precision control method and experimental research on the magnetically suspended rotor system in a large control moment gyroscope[D].Beijing: Beihang University, 2012: 2-19(in Chinese). [4] CUI P L, HE J X, FANG J C, et al.Research on method for adaptive imbalance vibration control for rotor of variable-speed mscmg with active-passive magnetic bearings[J].Journal of Vibration and Control, 2017, 23(2):167-180. doi: 10.1177/1077546315576430 [5] SASAKI T, SHIMOMURA T, SCHAUB H.Robust attitude control using a double-gimbal variable-speed control moment gyroscope[J].Journal of Spacecraft and Rockets, 2018, 55(5):1235-1247. doi: 10.2514/1.A34120 [6] TANG J Q, ZHAO S P, WANG Y, et al.High-speed rotor's mechanical design and stable suspension based on inertia-ratio for gyroscopic effect suppression[J].International Journal of Control, Automation and Systems, 2018, 16(4):1577-1591. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=31600f49d669d3a1d85d789aafb53c25 [7] 魏彤, 房建成.磁悬浮控制力矩陀螺磁轴承的变工作点线性化自适应控制方法[J].机械工程学报, 2007, 43(6):110-115. doi: 10.3321/j.issn:0577-6686.2007.06.020WEI T, FANG J C.Adaptive control based on variant operating-point linearization in magnetic bearings of MSCMG[J].Chinese Journal of Mechanical Engineering, 2007, 43(6):110-115(in Chinese). doi: 10.3321/j.issn:0577-6686.2007.06.020 [8] MIN S K, WOO H Y.Acceleration feedforward control in active magnetic bearing system subject to base motion by filtered-XLMS algorithm[J].IEEE Translations on Control Systems Technology, 2006, 14(1):134-141. doi: 10.1109/TCST.2005.847337 [9] 魏彤, 房建成.磁悬浮控制力矩陀螺的动框架效应及其角速率前馈控制方法研究[J].宇航学报, 2005, 26(1):19-23. doi: 10.3321/j.issn:1000-1328.2005.01.004WEI T, FANG J C.Moving-gimbal effects and angular rate feed forward control in magnetically suspended rotor system of CMG[J].Journal of Astronautics, 2005, 26(1):19-23(in Chinese). doi: 10.3321/j.issn:1000-1328.2005.01.004 [10] 魏彤, 房建成.磁悬浮控制力矩陀螺动框架效应的FXLMS自适应精确补偿控制方法仿真研究[J].宇航学报, 2006, 27(6):1205-1210. doi: 10.3321/j.issn:1000-1328.2006.06.017WEI T, FANG J C.Accurate compensation of moving-gimbal effects based on FXLMS algorithm in magnetically suspended control moment gyroscope[J].Journal of Astronautics, 2006, 27(6):1205-1210(in Chinese). doi: 10.3321/j.issn:1000-1328.2006.06.017 [11] CHEN J, LIU K, CHEN X.Modeling and low power control of active magnetic bearings system[C]//International Conference on Modelling, Identification and Control.Piscataway: IEEE Press, 2011: 319-324. [12] 孙玉坤, 朱志莹.三自由度混合磁轴承最小二乘向量积逆模辨识与解耦控制[J].中国电机工程学报, 2010, 30(15):112-117.SUN Y K, ZHU Z Y.Inverse-model identification and decoupling control based on least squares support vector machine for 3-DOF hybrid magnetic bearing[J].Proceedings of the CSEE, 2010, 30(15):112-117(in Chinese). [13] FANG J C, REN Y.Decoupling control of magnetically suspended rotor system in control moment gyros based on an inverse system method[J].IEEE/ASME Transactions on Mechatronics, 2012, 17(6):1133-1144. doi: 10.1109/TMECH.2011.2159618 [14] REN Y, FANG J C.High-precision and strong-robustness control for an MSCMG based on modal separation and rotation motion decoupling strategy[J].IEEE Transactions on Industrial Electronics, 2014, 61(3):1539-1551. doi: 10.1109/TIE.2013.2257147 [15] WEN T, FANG J C.A feedback linearization control for the nonlinear 5-DOF flywheel suspended by the permanent magnet biased hybrid magnetic bearings[J].Acta Astronautica, 2012, 79(10):131-139. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=4c97c024e23ccd4788873e2c1db26db9 [16] LI H, YANG S, REN H.Dynamic decoupling control of DGCMG gimbal system via state feedback linearization[J].Mechatronics, 2016, 36:127-135. doi: 10.1016/j.mechatronics.2016.04.004 [17] LIU C, LIU G, FANG J C.Feedback linearization and extended state observer based control for rotor-AMBs system with mismatched uncertainties[J].IEEE Transactions on Industrial Electronics, 2017, 64(2):1313-1322. doi: 10.1109/TIE.2016.2612622 [18] 谢进进, 刘刚, 文通, 等.双框架磁悬浮控制力矩陀螺磁轴承负载力矩复合补偿的控制[J].光学精密工程, 2015, 23(8):2211-2219. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201508013XIE J J, LIU G, WEN T, et al.Composite compensation for load torque of active magnetic bearing in DGMSCMG[J].Optics and Precision Engineering, 2015, 23(8):2211-2219(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201508013 [19] DONG L, YOU S.Adaptive control of an active magnetic bearing with external disturbance[J].ISA Transactions, 2014, 53(5):1410-1419. doi: 10.1016/j.isatra.2013.12.028 [20] BALINI H M N K, SCHERER C W, WITTE J.Performance enhancement for AMB systems using unstable controllers[J].IEEE Transactions on Control Systems Technology, 2011, 19(6):1479-1492. doi: 10.1109/TCST.2010.2097264 [21] PESCH A H, SMIRNOV A, PYRHONEN O, et al.Magnetic bearing spindle tool tracking through-synthesis robust control[J].IEEE/ASME Transactions on Mechatronics, 2015, 20(3):1448-1457. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0235637111/ [22] LIN F J, CHEN S Y, HUANG M S.Adaptive complementary sliding-mode control for thrust active magnetic bearing system[J].Control Engineering Practice, 2011, 19(7):711-722. doi: 10.1016/j.conengprac.2011.03.006 [23] FANG J C, REN Y.High-precision control for a single-gimbal magnetically suspended control moment gyro based on inverse system method[J].IEEE Transactions on Industrial Electronics, 2011, 58(9):4331-4342. doi: 10.1109/TIE.2010.2095394 [24] 夏长峰, 蔡远文, 任元, 等.磁悬浮控制敏感陀螺转子前馈解耦内模控制[J].北京航空航天大学学报, 2018, 44(3):480-488. doi: 10.13700/j.bh.1001-5965.2017.0190XIA C F, CAI Y W, REN Y, et al.Feed forward decoupling and internal model control for rotor of magnetically suspended control and sensing gyroscope[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3):480-488(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0190 [25] 董凤莲.屈稳太.电动汽车电驱动系统的EIMC及其鲁棒性研究[J].电气传动自动化, 2014, 36(1):6-10. doi: 10.3969/j.issn.1005-7277.2014.01.002DONG F L, QU W T.Study of enhanced internal model control and robustness for electric drive system of electric vehicles[J].Electrical Drive Automation, 2014, 36(1):6-10(in Chinese). doi: 10.3969/j.issn.1005-7277.2014.01.002 [26] 房建成, 任元.磁悬浮控制力矩陀螺技术[M].北京:国防工业出版社, 2014:19-20.FANG J C, REN Y.Magnetically suspended control moment gyroscope technology[M].Beijing:National Defense Industry Press, 2014:19-20(in Chinese). [27] 陈冲, 齐虹, 王炎, 等.非线性系统线性化的微分几何法[J].哈尔滨工业大学学报, 1993, 25(2):48-53. http://d.old.wanfangdata.com.cn/Periodical/anysfxyxb201605011CHEN C, QI H, WANG Y, et al.Differential geometric approach of linearization for nonlinear systems[J].Journal of Harbin Institute of Technology, 1993, 25(2):48-53(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/anysfxyxb201605011 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 605
- HTML全文浏览量: 41
- PDF下载量: 107
- 被引次数: 0
