



Fault-tolerant synchronization control for a dual redundant electro-hydraulic actuator system based on velocity estimation
-
摘要:
考虑飞机电液舵机活塞杆运动速度不易测量的情况,提出一种基于速度观测的容错同步控制策略,解决了双余度电液舵机系统(DREHAS)内泄漏共模故障(IL-CMF)下的位置跟踪控制问题。首先,通过引入2组参考轨迹并对模型进行线性变换,实现舵面位置跟踪与两舵机力输出同步控制解耦;其次,在扩展状态观测器(ESO)中加入故障参数自适应项,设计一种自适应扩展状态观测器(AESO)估计两通道舵机活塞杆速度和扰动,从而克服了故障条件下利用原系统模型设计ESO带来的估计结果不准确问题;最后,基于AESO的估计结果及故障参数在线更新结果,利用反步法设计了一种非线性容错同步控制器。Lyapunov稳定性分析结果表明,该控制方法可确保IL-CMF故障及时变干扰条件下,闭环系统所有信号有界,系统输出满足规定的性能要求。IL-CMF故障及常值干扰条件下,系统跟踪误差渐进收敛于零。仿真实验进一步验证了所提方法的有效性。
-
关键词:
- 双余度电液舵机系统(DREHAS) /
- 容错控制 /
- 同步控制 /
- 自适应扩展状态观测器(AESO) /
- 共模故障(CMF)
Abstract:Considering the fact that the piston velocity measurements of electro-hydraulic actuators are not available in practice, a fault-tolerant synchronization control strategy based on piston velocity estimation is proposed to deal with the positon tracking problem for a Dual Redundant Electro-Hydraulic Actuator System (DREHAS) suffering from Internal Leakage Common-Mode Fault (IL-CMF) and disturbances. First, by introducing two groups of reference trajectory and a linear transformation of the system states, the decoupling of the control surface position tracking and the two actuators output force synchronization control is realized. Second, an Adaptive Extended State Observer (AESO) is designed to estimate the piston rod velocities and disturbances of the two-channel actuators, which overcomes the inaccuracy of the estimation results of Extended State Observer (ESO) under fault condition. Finally, based on the state estimation and the online adaptation of faulty parameters, a nonlinear fault-tolerant synchronization controller is developed by employing backstepping method. Lyapunov stability analysis indicates that the proposed scheme can ensure that all the signals of the closed-loop system are bounded and the system can achieve a prescribed tracking performance under IL-CMF and time-varying disturbances. Moreover, the system tracking error converges to zero asymptotically in the present of IL-CMF and constant disturbances. A simulation experiment validates that the proposed control scheme is effective.
-

图 2 DREHAS正常条件下一个周期的舵面位置跟踪曲线
Figure 2. Control surface position tracking curves for DREHAS during one cycle under normal condition

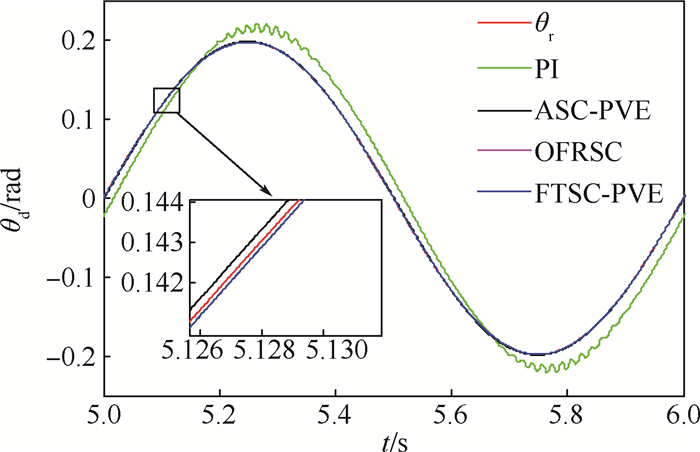
图 3 DREHAS故障条件下一个周期的舵面位置跟踪曲线
Figure 3. Control surface position tracking curves for DREHAS during one cycle under faulty condition

图 4 DREHAS系统舵面位置跟踪误差曲线
Figure 4. Control surface position tracking error curves for DREHAS

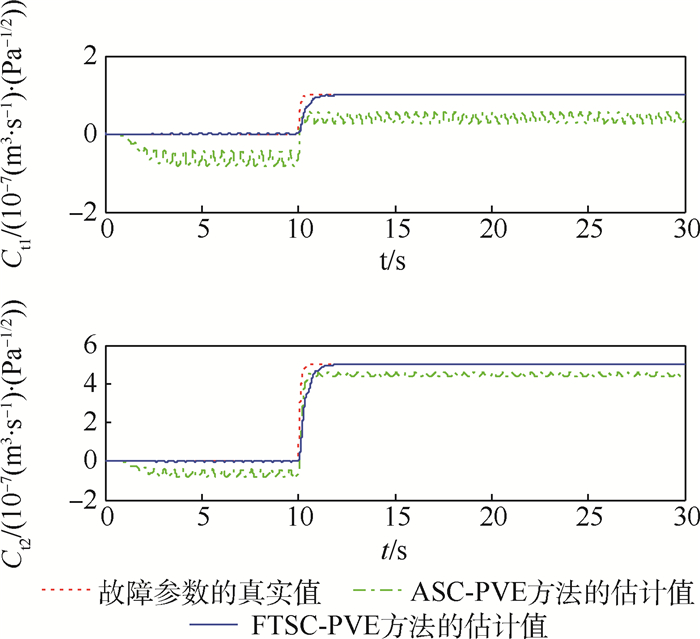
图 6 IL-CMF故障参数估计结果
Figure 6. Internal leakage common-mode fault parameter estimation results

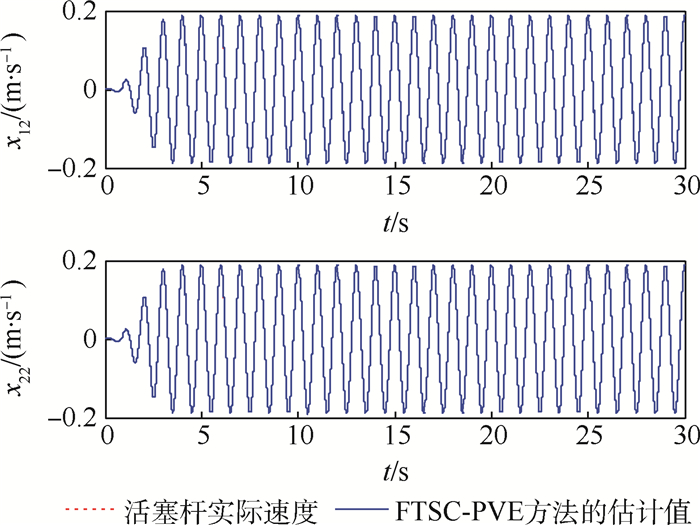
图 8 两通道舵机活塞杆速度估计结果
Figure 8. Piston rod velocity estimation results for two-channel actuators
表 1 4种方法的舵面位置跟踪性能对比
Table 1. Comparison of control surface position tracking performance among four methods
方法 正常条件下的稳态t∈[5, 10)s 故障瞬态t∈[10, 11)s 故障后的稳态t∈[25, 30)s Me/rad μe/rad σe/rad Me/rad Me/rad μe/rad σe/rad PI 0.029 3 0.018 3 0.008 0 0.039 0 0.038 8 0.023 3 0.012 6 ASC-PVE 0.001 4 5.747 9×10-4 3.256 1×10-4 0.002 4 0.001 3 5.034 9×10-4 2.634 7×10-4 OFRSC 2.128 5×10-4 1.314 8×10-4 6.726 8×10-5 4.822 1×10-4 4.822 4×10-4 1.840 2×10-4 1.095 1×10-4 FTSC-PVE 2.127 6×10-4 1.317 4×10-4 6.715 4×10-5 3.239 2×10-4 2.266 7×10-4 1.387 3×10-4 6.696 8×10-5  下载: 导出CSV
下载: 导出CSV
-
[1] RYDER D R.Redundancy actuator development study: N76-31177[R].Seattle: Boeing Commercial Airplane Corp., 1973: 1011-1012. [2] MITRA S, SAXENA N R, MCCLUSKEY E J.Common-mode failures in redundant VLSI systems:A survey[J].IEEE Transactions on Reliability, 2000, 49(3):285-295. doi: 10.1109/24.914545 [3] KARPENKO M, SEPEHRI N.Quantitative fault tolerant control design for a leaking hydraulic actuator[J].Journal of Dynamic Systems, Measurement, and Control, 2010, 132(5):626-634. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ce46bdd6d70b2b817a45cf2dae3fb83e [4] MAHULKAR V, ADAMS D E, DERRISO M.Adaptive fault tolerant control for hydraulic actuators[C]//Proceedings of the American Control Conference.Piscataway: IEEE Press, 2015: 2242-2247. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=7171066 [5] NAHIAN S A, TRUONG D Q, CHOWDHURY P.Modeling and fault tolerant control of an electro-hydraulic actuator[J].International Journal of Precision Engineering and Manufacturing, 2016, 17(10):1285-1297. doi: 10.1007/s12541-016-0153-2 [6] ZHAO Z.Active fault tolerant control of an electro-hydraulic driven elevator based on robust adaptive observers[D].Montreal: Concordia University, 2010: 131-169. http://spectrum.library.concordia.ca/979392/ [7] SHI C, WANG S P, WANG X J, et al.Active fault-tolerant control of dissimilar redundant actuation system based on performance degradation reference models[J].Journal of the Franklin Institute-Engineering and Applied Mathematics, 2017, 354(2):1087-1108. doi: 10.1016/j.jfranklin.2016.11.008 [8] LI T, YANG T, CAO Y Y, et al.Disturbance-estimation based adaptive backstepping fault-tolerant synchronization control for a dual redundant hydraulic actuation system with internal leakage faults[J].IEEE Access, 2019, 7:73106-73119. doi: 10.1109/ACCESS.2019.2920415 [9] SHI C, WANG X J, WANG S P, et al.Adaptive decoupling synchronous control of dissimilar redundant actuation system for large civil aircraft[J].Aerospace Science and Technology, 2015, 47:114-124. doi: 10.1016/j.ast.2015.09.012 [10] WANG X J, SHI C, WANG S P.Extended state observer-based motion synchronization control for hybrid actuation system of large civil aircraft[J].International Journal of System Science, 2017, 48(10):2212-2222. doi: 10.1080/00207721.2017.1309592 [11] 齐海涛, 滕雅婷.双余度电静液作动器力均衡控制[J].北京航天航空大学学报, 2017, 43(2):270-276. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjhkhtdxxb201702008QI H T, TENG Y T.Force equalization control for dual-redundancy electro-hydrostatic actuator[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(2):270-276(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjhkhtdxxb201702008 [12] 付永领, 范殿梁, 李祝锋.非相似余度作动系统静态力均衡控制策略[J].北京航天航空大学学报, 2014, 40(11):1492-1499. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjhkhtdxxb201411003FU Y L, FAN D L, LI Z F.Static force equalization for dissimilar redundant actuator system[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(11):1492-1499(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjhkhtdxxb201411003 [13] NA J, LI Y P, HUANG Y B, et al.Output feedback control of uncertain hydraulic servo systems[J].IEEE Transactions on Industrial Electronics, 2020, 67(1):490-500. doi: 10.1109/TIE.2019.2897545 [14] YAO J Y, JIAO Z X, MA D W.Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping[J].IEEE Transactions on Industrial Electronics, 2014, 61(11):6285-6293. doi: 10.1109/TIE.2014.2304912 [15] GUO W W, YAO J Y, YAO Z K, et al.Output feedback model predictive control of hydraulic systems with disturbances compensation[J].ISA Transactions, 2019, 88:216-224. doi: 10.1016/j.isatra.2018.12.007 [16] JELALI M, KROLL A.Hydraulic servo systems-modeling, identification and control[M].Berlin:Springer, 2003:102-103. [17] LI T, YANG T, CAO Y Y, et al.Adaptive robust fault-tolerant synchronization control for a dual redundant hydraulic actuation system with common-mode fault[J].Mathematical Problems in Engineering, 2018, 2018:6570104. [18] YAO B, BU F, REEDY J, et al.Adaptive robust motion control of single-rod hydraulic actuators:Theory and experiments[J].IEEE-ASME Transactions on Mechatronics, 2000, 5(1):79-91. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=828592 [19] YAO J, DENG W.Active disturbance rejection adaptive control of hydraulic servo systems[J].IEEE Transactions on Industrial Electronics, 2017, 64(10):8023-8032. doi: 10.1109/TIE.2017.2694382 -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 537
- HTML全文浏览量: 176
- PDF下载量: 68
- 被引次数: 0
