



-
摘要:
针对四旋翼姿态控制欠驱动、强耦合的特性,提出了一种基于线性/非线性切换自抗扰控制(SADRC)的四旋翼姿态解耦控制方法。首先,以四旋翼平台为研究对象,建立了其姿态的数学模型,引入SADRC,对基本原理进行了介绍。其次,基于SADRC设计了四旋翼姿态解耦控制器,并基于Lyapunov函数对系统进行了稳定性分析。最后,通过仿真实验对SADRC控制性能进行了验证。结果表明:SADRC在某些场合抗干扰和鲁棒性方面较线性自抗扰控制(LADRC)和非线性自抗扰控制(NLADRC)具有优势,具有工程应用的潜力。
-
关键词:
- 四旋翼 /
- 姿态控制 /
- 线性/非线性切换自抗扰控制(SADRC) /
- 稳定性分析 /
- 鲁棒性
Abstract:An Switch in linear-nonlinear Active Disturbance Rejection Control (SADRC) attitude decoupling control approach was proposed due to the underactuated, strong coupling characteristics of quadrotor. First, the mathematical model of the quadrotor attitude was formulated by taking quadrotor aircraft platform as research object. The SADRC and the basic principles of it were introduced. Then, an attitude decoupling controller based on SADRC was designed, followed by the stability analysis via Lyapunov function. Finally, the control performance of SADRC is verified by simulation experiments. The results indicate that SADRC controller possesses better performance to both Linear Active Disturbance Rejection Control (LADRC) and Nonlinear Active Disturbance Rejection Control (NLADRC) in anti-disturbance and robustness in some occasions, and has potential applications in engineering practice.
-

图 4 四旋翼ϕ、θ、ψ通道跟踪和抗扰效果
Figure 4. Tracking and anti-disturbance performance for quadrotor of ϕ、θ、ψchannel

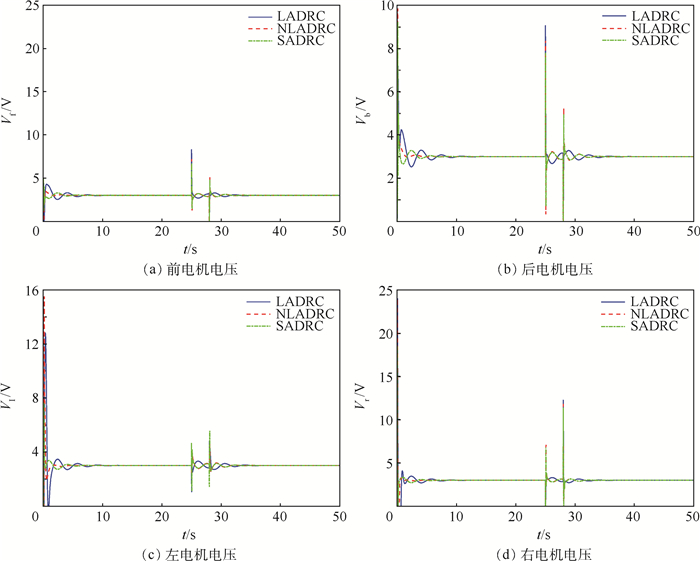
图 6 参数摄动情况下3种控制方法的鲁棒性性能
Figure 6. Robustness performance for the three controlled quadrotor system
表 1 LADRC、NLADRC、SADRC控制器参数选择
Table 1. Parameter preferences of LADRC, NLADRC, SADRC
控制器 ϕ通道 θ通道 ψ通道 LADRC[15] wo=28, wc=2.8, b0=0.424 wo=30, wc=3, b0=0.424 wo=30, wc=3.2, b0=0.213 NLADRC[14] ESO α1=0.75, α2=0.5, α3=0.25,
β01=30, β02=300, β03=1 000,
b0=0.9, δ=0.006α1=0.75, α2=0.5, α3=0.25,
β01=30, β02=300, β03=1 000,
b0=0.9, δ=0.006α1=0.75, α2=0.5, α3=0.25,
b0=0.06, δ=0.004, β01=30,
β02=300, β03=1 000NLESF δ=3,α1=0.5, α2=0.05,
β1=150, β2=120δ=3,α1=0.5, α2=0.05,
β1=150, β2=120δ=1,α1=0.5, α2=0.05,
β1=300, β2=180SADRC α1=1, α2=0.5, α3=0.25,
wc=2.8, wo=30, woN=8,
δs=0.005, b0=0.424,
δ=0.002,β01=3woN,
β02=3woN2/5, β03=woN3/9α1=1, α2=0.5, α3=0.25,
wc=3, wo=30, woN=8,
δs=0.005, b0=0.424,
δ=0.002,β01=3woN,
β02=3woN2/5, β03= w3oN/9α1=1, α2=0.5, α3=0.25,
wc=3.2, wo=8, woN=8,
δs=0.005, b0=0.213,
δ=0.002,β01=3woN,
β02=3woN2/5, β03= woN3/9注:α1、α2、α3分别为所设计控制器NLESO中非线性函数fal(e, αi, δ)对应αi(i=1, 2, 3)大小;wo和wc分别为LESO和控制器的带宽;b0为系统参数;δ和δs分别为切换自抗扰线性区间长度和切换临界值;β01、β02、β03为NLESO的增益;β1和β2分别为控制分量u0的控制律增益;woN为NLESO带宽;h为离散步长。  下载: 导出CSV
下载: 导出CSV
-
[1] 蒋回蓉, 邓志诚, 祝明, 等.变桨距四旋翼飞行器的建模与控制研究[J].电光与控制, 2015, 22(10):48-55.JIANG H R, DENG Z C, ZHU M, et al.On modeling and control of quadrotor aircraft with variable blade pitch[J].Electronics Optics & Control, 2015, 22(10):48-55(in Chinese). [2] DIERKS T, JAGANNATHAN S.Output feedback control of a quadrotor UAV using neural networks[J].IEEE Transactions on Neural Networks, 2010, 21(1):55-66. [3] 方旭, 刘金琨.四旋翼无人机动态面控制[J].北京航空航天大学学报, 2016, 42(8):1777-1784.FANG X, LIU J K.Dynamic surface control for quadrotor unmanned air vehicle[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8):1777-1784(in Chinese). [4] 方旭, 刘金琨.四旋翼飞行器三维航迹规划及跟踪控制[J].控制理论与应用, 2015, 32(8):1120-1128.FANG X, LIU J K.Three-dimension path planning and trajectory tracking control for quadrotor unmanned aerial vehicle[J].Control Theory & Applications, 2015, 32(8):1120-1128(in Chinese). [5] CUI R, LI Y, YAN W.Mutual information-based multi-AUV path planning for scalar field sampling using multidimensional RRT*[J].IEEE Transactions on System, Man, and Cybernetics Systems, 2016, 46(7):993-1004. [6] HE L L, BAI P, LIANG X L, et al.Feedback formation control of UAV swarm with multiple implicit leaders[J].Aerospace Science and Technology, 2018, 72:327-334. [7] 郭民环, 苏岩, 朱欣华.带吊挂负载的四旋翼无人机滚动纳什控制[J].北京航空航天大学学报, 2018, 44(11):2343-2349.GUO M H, SU Y, ZHU X H.Receding Nash control for quadrotor UAVs carrying a cable-suspended payload[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(11):2343-2349(in Chinese). [8] BOUABDALLAH S, NOTH A, SIEGWART R.PID vs LQR control techniques applied to an indoor micro quadrotor[C]//2004 IEEE International Conference on Intelligent Robots and Systems.Piscataway: IEEE Press, 2004: 2451-2456. [9] BOUABDALLAH S, SIEGWART R.Backstepping and sliding-mode techniques applied to an indoor micro quadrotor[C]//2005 IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2005: 2247-2252. [10] NICOL C, MACNAB C J B, RAMIREZ-SERRANO A.A robust adaptive control of a quadrotor helicopter[J].Mechatronics, 2011, 21(6):927-938. [11] 蒋回蓉.变桨距四旋翼飞行器的建模与控制研究[D].北京: 北京航空航天大学, 2014.JIANG H R.On modeling and control of quadrotor aircraft with variable blade pitch[D].Beijing: Beihang University, 2014(in Chinese). [12] 张静, 张华, 刘恒, 等.微型四旋翼无人机模糊PID控制[J].兵工自动化, 2014, 33(6):58-62.ZHANG J, ZHANG H, LIU H, et al.Fuzzy-PID control for macro-quadrotor UAV[J].Ordnance Industry Automation, 2014, 33(6):58-62(in Chinese). [13] 韩京清.自抗扰控制器及其应用[J].控制与决策, 1998, 13(1):19-23.HAN J Q.Auto-disturbance-rejection controller and its applications[J].Control and Decision, 1998, 13(1):19-23(in Chinese). [14] 李毅, 陈增强, 孙明玮, 等.离散型自抗扰控制器在四旋翼飞行姿态控制中的应用[J].控制理论与应用, 2015, 32(11):1470-1477.LI Y, CHEN Z Q, SUN M W, et al.Attitude control for quadrotor helicopter based on discrete-time active disturbance rejection control[J].Control Theory & Applications, 2015, 32(11):1470-1477(in Chinese). [15] 刘敏, 吉月辉, 李俊芳, 等.四旋翼飞行器自抗扰姿态控制[J].计算机仿真, 2016, 33(3):71-75.LIU M, JI Y H, LI J F, et al.Active disturbance rejection attitude control for quadrotor aircraft[J].Computer Simulation, 2016, 33(3):71-75(in Chinese). [16] 杨立本, 章卫国, 黄得刚.基于ADRC姿态解耦的四旋翼飞行器鲁棒轨迹跟踪[J].北京航空航天大学学报, 2015, 41(6):1026-1033.YANG L B, ZHANG W G, HUANG D G.Robust trajectory tracking for quadrotor aircraft based on ADRC attitude decoupling control[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(6):1026-1033(in Chinese). [17] 李杰, 齐晓慧, 夏元清, 等.线性/非线性自抗扰切换控制方法研究[J].自动化学报, 2016, 42(2):202-212.LI J, QI X H, XIA Y Q, et al.On linear/nonlinear active disturbance rejection switching control[J].Acta Automation Sinica, 2016, 42(2):202-212(in Chinese). [18] LI J, XIA Y, QI X, et al.On the necessity, scheme, and basis of the linear-nonlinear switching in active disturbance rejection control[J].IEEE Transactions on Industrial Electronics, 2017, 64(2):1425-1435. -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 794
- HTML全文浏览量: 125
- PDF下载量: 137
- 被引次数: 0
