



-
摘要:
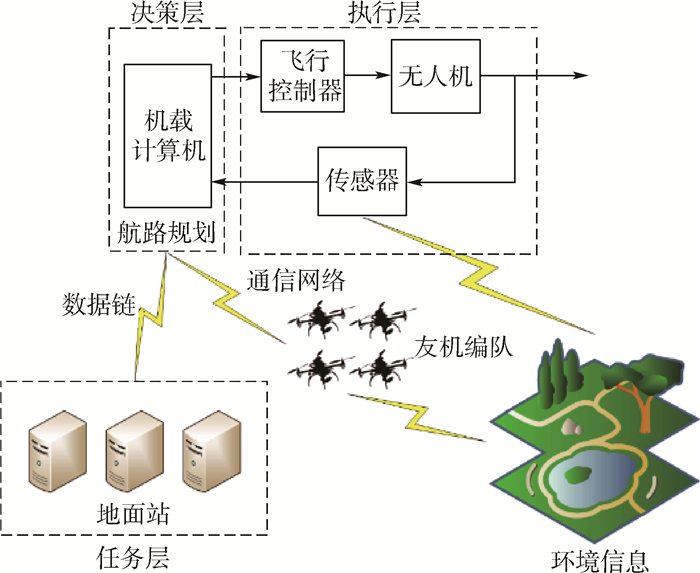
针对无人机(UAV)集群在未知环境中无先验信息条件下的搜索问题,提出了一种以信息素为决策机制的无人机集群协同搜索算法。首先,考虑无人机通信约束,建立了有外部节点的星型网络通信和无外部节点的自组织网络通信2种形式的搜索模型。其次,通过环境地图向信息素地图映射的方法建立任务环境模型。将任务过程分为3个阶段,在搜索阶段,无人机通过不断地移动实现本机信息素地图的更新;在通信阶段,通过通信网络实现多机信息素地图的融合;在决策阶段,根据局部信息和全局信息做出决策,并将栅格信息素浓度作为决策函数来引导无人机的位置更新。基于信息素地图覆盖率来定量描述搜索效果。最后,仿真结果表明,所提算法能够对区域进行覆盖搜索,表现为搜索效率高、抗毁性强、受集群的初始位置影响小。
-
关键词:
- 信息素 /
- 未知环境 /
- 无人机(UAV)集群 /
- 协同搜索 /
- 搜索覆盖率
Abstract:To solve the problem of Unmanned Aerial Vehicle (UAV) swarm search in unknown environment without prior information, this paper proposes a UAV swarm cooperative search algorithm with pheromone as decision mechanism. Firstly, considering the communication constraints of UAV, two search models which are star communication network with external nodes and self-organizing communication network without external nodes are established. Secondly, the task environment model is established by mapping environment map to pheromone map. In this paper, the task process is divided into three stages. In the search stage, the UAV can update the local pheromone map by moving constantly. In the communication stage, the fusion of UAV swarm pheromone maps is realized through the communication network. In the decision-making stage, the decision is made based on the local information and the global information, and the grid pheromone concentration is taken as the decision function to guide the position update of the UAV. Based on pheromone map coverage rate, the search results are quantitatively described. Finally, the simulation results show that the method proposed in this paper can search and cover the region, which is characterized by high search efficiency, strong destruction resistance and little influence by the initial location of the swarm.
-

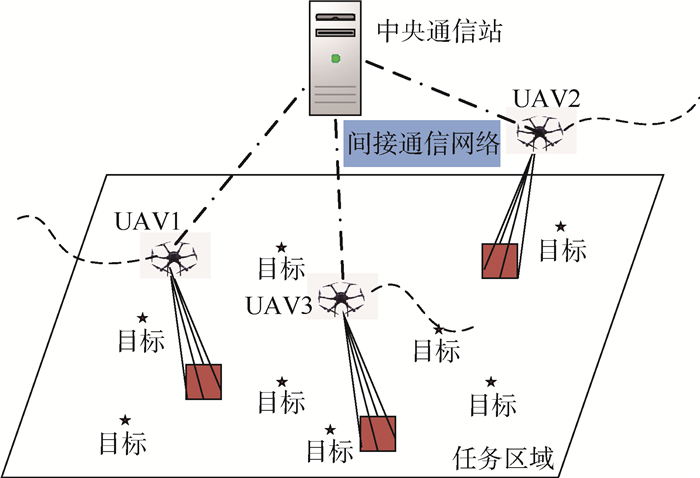
图 6 有外部节点的星型网络通信示意图
Figure 6. Schematic diagram of star network communication with external nodes

图 7 无外部节点的自组织网络通信示意图
Figure 7. Schematic diagram of self-organizing network communication without external nodes

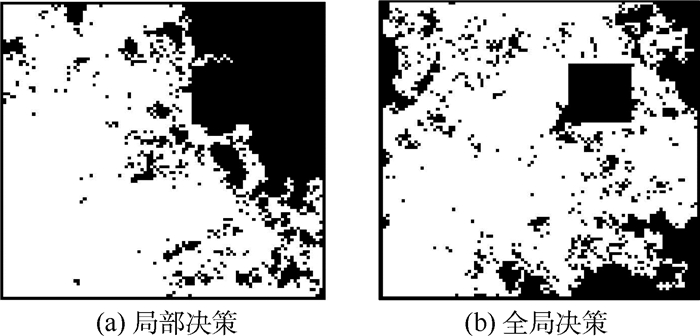
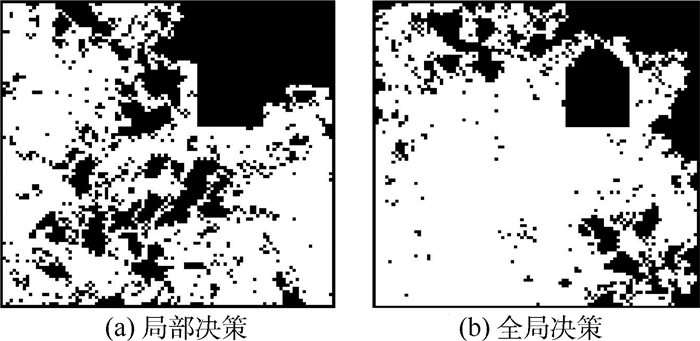
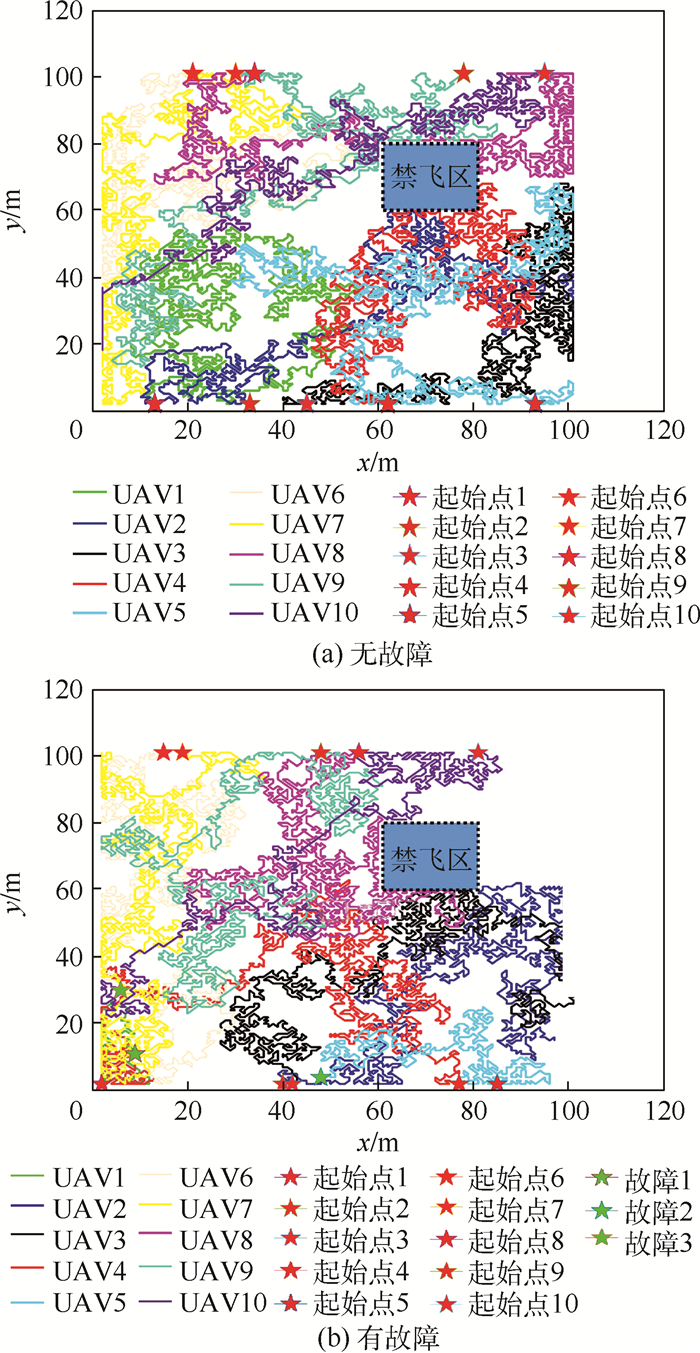
图 16 自组织网络通信模式下搜索效果图
Figure 16. Search rendering under self-organizing network communication

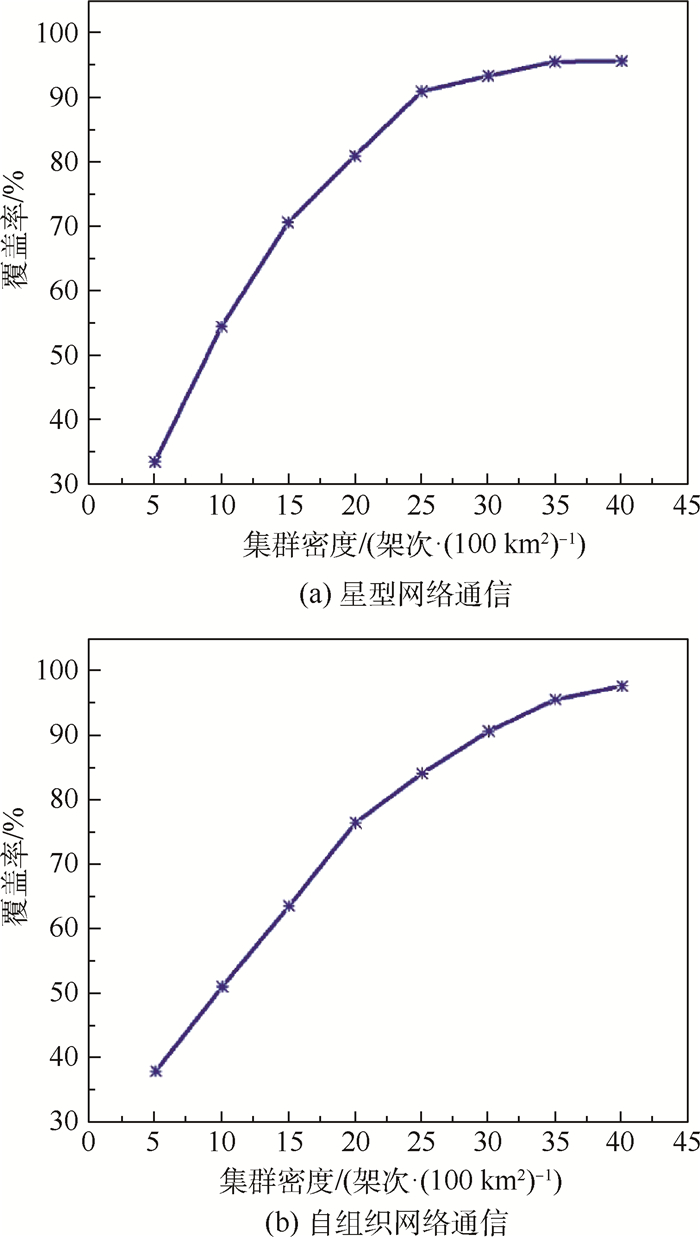
图 17 星型网络通信和自组织网络通信下覆盖率随集群密度变化曲线
Figure 17. Curves of coverage rate changing with swarm's UAV density under star network communication and self-organizing network communication

图 19 不同无人机数目下搜索效率随占空比的变化
Figure 19. Curves of search efficiency rate changing with duty cycle for different swarm sizes

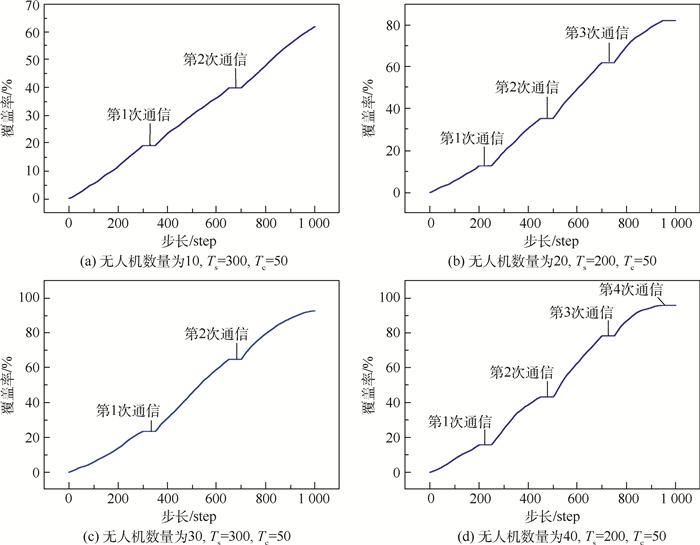
图 20 不同无人机数目最佳搜索占空比下的实时覆盖率变化曲线
Figure 20. Real-time changing curves of coverage rate in the best search duty cycle for different swarm sizes

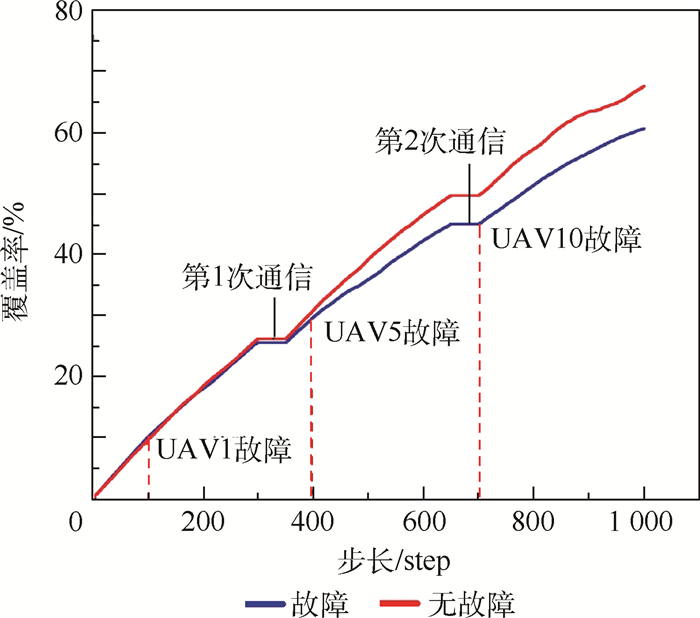
图 21 无故障和有故障时覆盖率实时变化曲线
Figure 21. Real-time changing curves of coverage rate with and without fault
表 1 无人机集群协同搜索原则
Table 1. Principle of UAV swarm cooperative search
条件 原则 搜索效率 覆盖率高
重叠率低
搜索时间短搜索范围 不飞出搜索边界
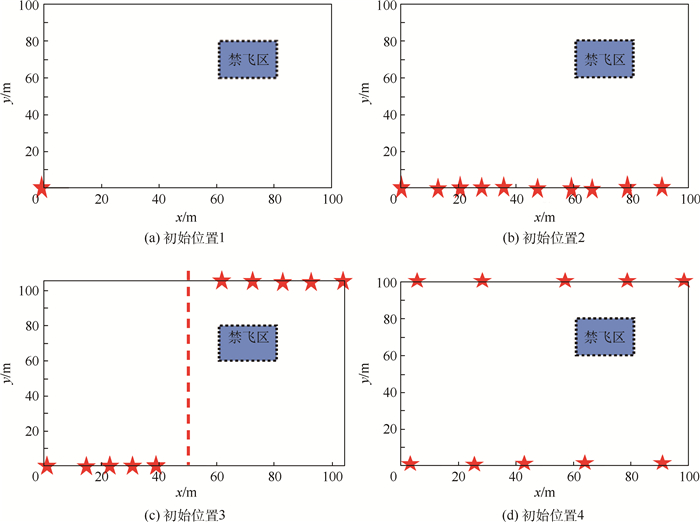
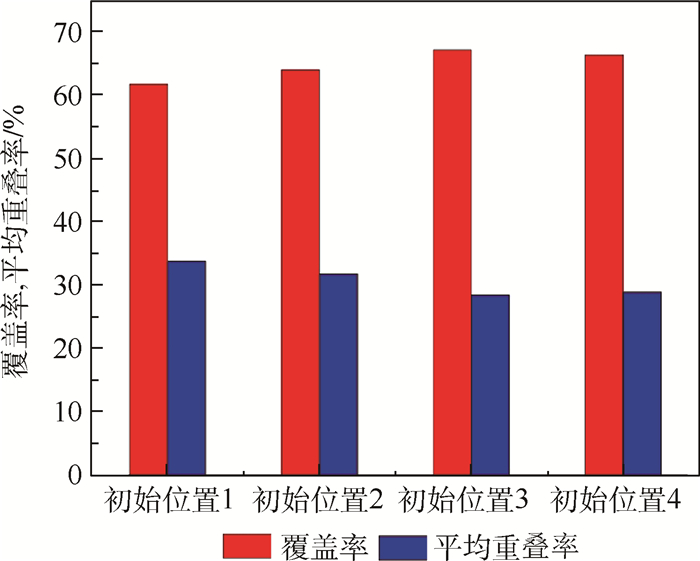
不进入非搜索区域初始位置 搜索效率对集群编队的
初始位置不敏感抗毁性 搜索效率受单机故障影响小  下载: 导出CSV
下载: 导出CSV
表 2 星型网络通信模式下搜索结果
Table 2. Search results under star network
决策方式 集群规模 Ts/steps Tc/steps 覆盖率/% 随机决策 20 200 50 18.732 1 局部信息决策 20 200 50 70.145 8 全局信息决策 20 200 50 82.843 8
下载: 导出CSV
表 3 自组织网络通信模式下搜索结果
Table 3. Search results under self-organizing network
决策方式 集群规模 覆盖率/% 随机决策 20 20.157 6 局部信息决策 20 65.458 3 全局信息决策 20 76.562 5
下载: 导出CSV
-
[1] 梁晓龙, 何吕龙, 张佳强, 等. 航空集群构型控制及其演化方法[J]. 中国科学: 技术科学, 2019, 49(3): 277-287. https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201903004.htmLIANG X L, HE L L, ZHANG J Q, et al. Configuration control and evolutionary mechanism of aircraft swarm[J]. Scientia Sinica Technologica, 2019, 49(3): 277-287(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201903004.htm [2] 梁晓龙, 孙强, 尹忠海, 等. 大规模无人系统集群智能控制方法综述[J]. 计算机应用研究, 2015, 32(1): 17-22. doi: 10.3969/j.issn.1001-3695.2015.01.004LIANG X L, SUN Q, YIN Z H, et al. Review on large-scale unmanned system swarm intelligence control method[J]. Application Research of Computers, 2015, 32(1): 17-22(in Chinese). doi: 10.3969/j.issn.1001-3695.2015.01.004 [3] HU J, XIE L, XU J, et al. Multi-agent cooperative target search[J]. Sensors, 2014, 14(6): 9408-9428. doi: 10.3390/s140609408 [4] HU J, XIE L, XU J, et al.Vision-based multi-agent cooperative target search[C]//International Conference on Control Automation Robotics & Vision.Piscataway: IEEE Press, 2014: 895-900. [5] 刘重, 高晓光, 符小卫. 带信息素回访机制的多无人机分布式协同目标搜索[J]. 系统工程与电子技术, 2017, 39(9): 1998-2011. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201709013.htmLIU C, GAO X G, FU X W.Multi-UAVs distributed cooperative target search algorithm with controllable revisit mechanism based on digital pheromone[J]. Systems Engineering and Electronics, 2017, 39(9): 1998-2011(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201709013.htm [6] 彭辉, 沈林成, 朱华勇. 基于分布式模型预测控制的多UAV协同区域搜索[J]. 航空学报, 2010, 31(3): 593-601. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201003029.htmPENG H, SHEN L C, ZHU H Y.Multiple UAV cooperative area search based on distributed model predictive control[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(3): 593-601(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201003029.htm [7] 侯岳奇, 梁晓龙, 何吕龙, 等. 未知环境下无人机集群协同区域搜索算法[J]. 北京航空航天大学学报, 2019, 45(2): 347-356. doi: 10.13700/j.bh.1001-5965.2018.0230HOU Y Q, LIANG X L, HE L L, et al. Cooperative area search algorithm for UAV swarm in unknown environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2): 347-356(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0230 [8] 吴青坡, 周绍磊, 刘伟, 等. 基于集散式模型预测控制的多无人机协同分区搜索[J]. 控制理论与应用, 2015, 32(10): 1414-1421. doi: 10.7641/CTA.2015.50482WU Q P, ZHOU S L, LIU W, et al. Multi-unmanned aerial vehicles cooperative search based on central-distributed model predictive control[J]. Control Theory & Applications, 2015, 32(10): 1414-1421(in Chinese). doi: 10.7641/CTA.2015.50482 [9] 吴文超, 黄长强, 宋磊, 等. 不确定环境下的多无人机协同搜索航路规划[J]. 兵工学报, 2011, 32(11): 1337-1342. https://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201111007.htmWU W C, HUANG C Q, SONG L, et al. Cooperative search and path planning of multi-unmanned air vehicles in uncertain environment[J]. Acta Armamentarii, 2011, 32(11): 1337-1342(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201111007.htm [10] 符小卫, 李建, 高晓光. 带通信约束的多无人机协同搜索中的目标分配[J]. 航空学报, 2014, 35(5): 1347-1356. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201405020.htmFU X W, LI J, GAO X G.Target allocation in multi-UAV cooperative search with communication constraints[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(5): 1347-1356(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201405020.htm [11] BERTUCCELLI L F, HOW J P.Robust UAV search for environments with imprecise probability maps[C]//Proceedings of the European Control Conference CDC-ECC on Decision & Control.Piscataway: IEEE Press, 2005: 5680-5685. [12] 沈东, 魏瑞轩, 茹常剑. 基于数字信息素的无人机集群搜索控制方法[J]. 系统工程与电子技术, 2013, 35(3): 591-596. doi: 10.3969/j.issn.1001-506X.2013.03.24SHEN D, WEI R X, RU C J.Digital-pheromone-based control method for UAV swarm search[J]. Systems Engineering and Electronics, 2013, 35(3): 591-596(in Chinese). doi: 10.3969/j.issn.1001-506X.2013.03.24 [13] 朱创创, 梁晓龙, 张佳强, 等. 无人机集群编队控制演示验证系统[J]. 北京航空航天大学学报, 2018, 44(8): 1739-1747. doi: 10.13700/j.bh.1001-5965.2017.0600ZHU C C, LIANG X L, ZHANG J Q.Demonstration and verification system for UAV swarm formation control[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(8): 1739-1747(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0600 [14] WAN S G, MA X T, LI K.Application research of star wireless sensor network[J]. Communications Technology, 2009, 42(3): 173-176. [15] 刘昕. 军用无人机自组网技术研究[D]. 南京: 南京理工大学, 2014: 15-20.LIU X.Study of MANET for military UAVs[D].Nanjing: Nanjing University of Science and Technology, 2014: 15-20(in Chinese). [16] PARUNAK H V, PURCELL M, O'CONNELL R.Digital pheromones for autonomous coordination of swarming UAV's[C]//Proceedings of the 1st UAV Conference.Reston: AIAA, 2002: 20-23. [17] SAUTER J A, MATTHEWS R S, PARUNAK H V D, et al.Performance of digital pheromones for swarming vehicle control[C]//4th International Joint Conference on Autonomous Agents and Multiagent Systems.Utrecht: DBLP, 2005: 25-29. [18] PARUNAK H V D, BRUECKNER S A, SAUTER J A.Digital pheromones for coordination of unmanned vehicles[C]//First International Joint Conference on Autonomous Agents & Multiagent Systems.Utrecht: DBLP, 2004: 246-263. [19] BREEN M F, LESHNER A I.Maternal pheromone: A demonstration of its existence in the mouse (Mus musculus)[J]. Physiology and Behavior, 1977, 18(3): 527-529. doi: 10.1016/0031-9384(77)90269-4 -

 下载:
下载:













 点击查看大图
点击查看大图
计量
- 文章访问数: 797
- HTML全文浏览量: 102
- PDF下载量: 241
- 被引次数: 0
