



-
摘要:
针对有向通信拓扑网络下具有通信时滞与外部干扰的无人集群系统(AUSS)时变编队
H ∞控制问题进行了研究。首先,基于AUSS期望编队构型信息、无人机(UAV)实时状态信息以及通信UAV之间带通信时滞的状态误差信息提出了AUSS的编队控制方法,通过变量替换将AUSS的编队控制问题转换成低维闭环系统的渐近稳定问题,并以线性矩阵不等式(LMI)形式给出了系统稳定的充分条件与最大允许通信时滞的计算公式。其次,通过构造Lyapunov-Krasovskii(L-K)泛函,证明了存在通信时滞与外部干扰条件下AUSS能够实现时变编队。最后,通过数值仿真验证所设计方法的准确性与有效性。-
关键词:
- 无人集群系统(AUSS) /
- 时变编队 /
- 通信时滞 /
- 外部干扰 /
- H∞控制
Abstract:This paper studies the time-varying formation
H ∞ control problem for Air Unmanned Swarm System (AUSS) under directed communication topology, corrupted by communication delay and external disturbances. First, based on the expected formation configuration information of swarm system, the real-time state information of Unmanned Aerial Vehicle (UAV) and the state error information with communication delay between UAVs which are able to communicate, the formation control approach of unmanned swarm system is proposed. Through variable substitution, the swarm system formation control problem is converted into the asymptotic stability problem of lower-dimensional closed-loop system, and the sufficient conditions for the stability of the system and the calculation formula of the maximum allowable communication delay are given in the form of Linear Matrix Inequalities (LMIs). Then, it is proved that the unmanned swarm system can accomplish time-varying formation by constructing Lyapunov-Krasovskii (L-K) functional. Finally, through numerical simulation, the accuracy and effectiveness of the proposed method are verified. -

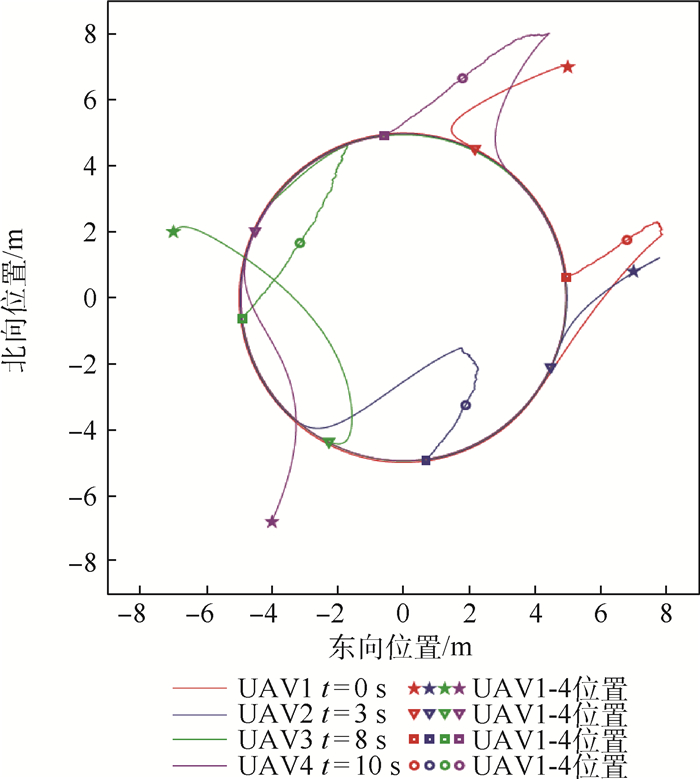
图 2 存在通信时滞与随机噪声干扰条件下的运动轨迹
Figure 2. Trajectories with communication delay and random noise disturbances


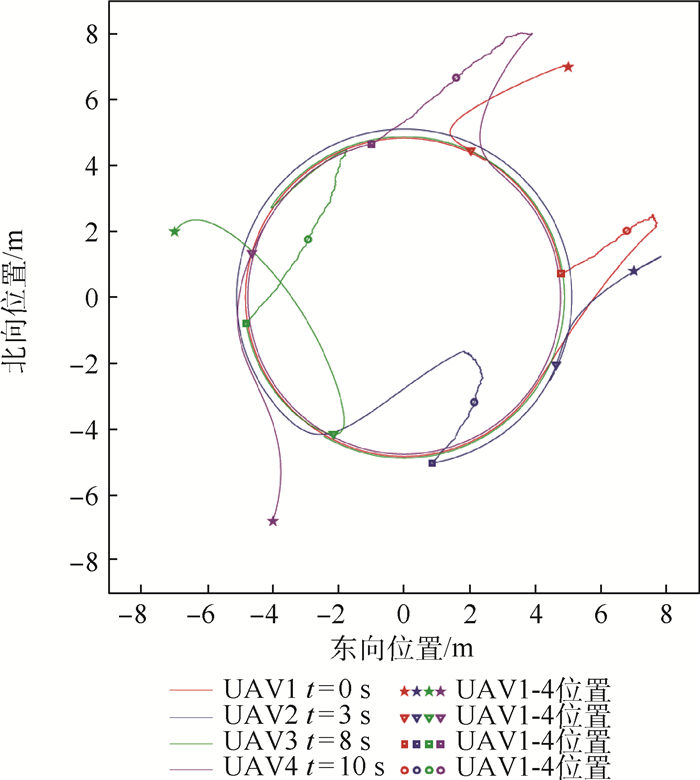
图 4 存在通信时滞与正向外部干扰条件下的运动轨迹
Figure 4. Trajectories with communication delay and positive external disturbances


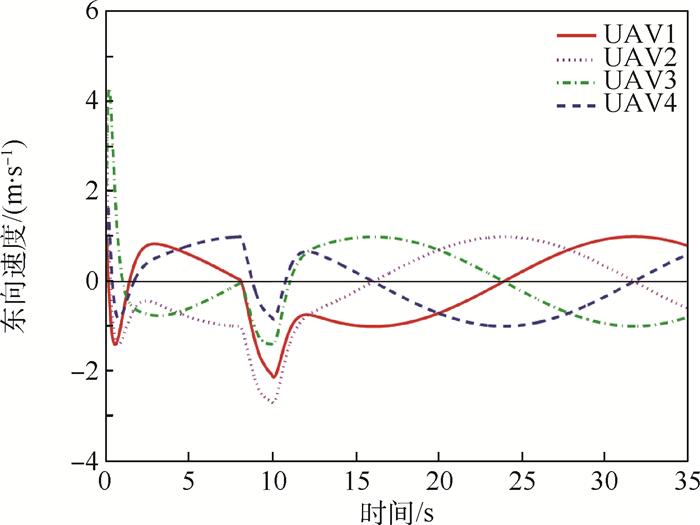
图 6 存在通信时滞与正向外部干扰条件下的东向速度变化曲线
Figure 6. Eastern velocity change curves with communication delay and positive external disturbances
-
[1] 侯岳奇, 梁晓龙, 何吕龙, 等. 未知环境下无人机集群协同区域搜索算法[J]. 北京航空航天大学学报, 2019, 45(2): 347-356. doi: 10.13700/j.bh.1001-5965.2018.0230HOU Y Q, LIANG X L, HE L L, et al. Cooperative area search algorithm for UAV swarm in unknown environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2): 347-356(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0230 [2] 段海滨, 申燕凯, 赵彦杰, 等. 2019年无人机热点回眸[J]. 科技导报, 2020, 38(1): 170-186. https://www.cnki.com.cn/Article/CJFDTOTAL-KJDB202001018.htmDUAN H B, SHEN Y K, ZHAO Y J, et al. Review of technological hotspots of unmanned aerial vehicle in 2019[J]. Science & Technology Review, 2020, 38(1): 170-186(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KJDB202001018.htm [3] 马思迁, 董朝阳, 马鸣宇, 等. 基于自适应通信拓扑四旋翼无人机编队重构控制[J]. 北京航空航天大学学报, 2018, 44(4): 841-850. doi: 10.13700/j.bh.1001-5965.2017.0281MA S Q, DONG C Y, MA M Y, et al. Formation reconfiguration control of quadrotor UAVs based on adaptive communication topology[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(4): 841-850(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0281 [4] 刘炜伦, 张衡阳, 郑博, 等. 蜂群无人机自组网多优先级自适应退避算法[J]. 北京航空航天大学学报, 2019, 45(2): 325-331. doi: 10.13700/j.bh.1001-5965.2018.0305LIU W L, ZHANG H Y, ZHENG B, et al. An adaptive backoff algorithm for FANETs based on multiple priority[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2): 325-331(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0305 [5] XU Y, LI D Y, LUO D L, et al. Two-layer distributed hybrid affine formation control of network Euler-Lagrange systems[J]. Journal of Franklin Institute, 2019, 356: 2172-2197. doi: 10.1016/j.jfranklin.2018.11.029 [6] 徐扬, 罗德林, 周路鹏, 等. 基于增益矩阵的二阶集群系统鲁棒分布式立体编队控制[J]. 中国科学: 技术科学, 2020, 50(4): 461-474. https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK202004008.htmXU Y, LUO D L, ZHOU L P, et al. A gain matrix approach for robust distributed 3D formation control with second order swarm systems[J]. Scientia Sinica Technologica, 2020, 50(4): 461-474(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JEXK202004008.htm [7] 陈杰, 辛斌. 有人/无人系统自主协同的关键科学问题[J]. 中国科学: 信息科学, 2018, 48(9): 1270-1274. https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201809012.htmCHEN J, XIN B. Key scientific problems in the autonomous cooperation of manned-unmanned systems[J]. Science Sinica Information, 2018, 48(9): 1270-1274(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201809012.htm [8] 段海滨, 张岱峰, 范彦铭, 等. 从狼群智能到无人机集群协同决策[J]. 中国科学: 信息科学, 2019, 49(1): 112-118. https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201901008.htmDUAN H B, ZHANG D F, FAN Y M, et al. From wolf pack intelligence to UAV swarm cooperative decision-making[J]. Science Sinica Information, 2019, 49(1): 112-118(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201901008.htm [9] 申凯燕, 段海滨, 邓亦敏, 等. 仿鸽群被动式惯性应急避障的无人机集群飞行验证[J]. 中国科学: 信息科学, 2019, 49(10): 1343-1352. https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201910008.htmSHEN K Y, DUAN H B, DENG Y M, et al. Verification of a UAV swarm fight simulating the passive inertial emergency obstacle avoidance behavior of a pigeon flock[J]. Science Sinica Information, 2019, 49(10): 1343-1352(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-PZKX201910008.htm [10] 段海滨, 霍梦真, 范彦铭, 等. 仿鹰群智能的无人机集群协同对抗飞行验证[J]. 控制理论与应用, 2018, 35(12): 1812-1820. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201812015.htmDUAN H B, HUO M Z, FAN Y M, et al. Flight verification of multiple UAVs collaborative air combat imitating the intelligent behavior in hawks[J]. Control Theory & Applications, 2018, 35(12): 1812-1820(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201812015.htm [11] 周绍磊, 祁亚辉, 张雷, 等. 切换拓扑下无人机集群时变编队控制[J]. 航空学报, 2017, 38(4): 3204521-3204529. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201704025.htmZHOU S L, QI Y H, ZHANG L, et al. Time-varying formation control of UAV swarm systems with switching topologies[J]. Acta Aeronautica et Astronautica Sinica, 2017, 38(4): 3204521-3204529(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201704025.htm [12] 朱创创, 梁晓龙, 张佳强, 等. 无人机集群编队控制演示验证系统[J]. 北京航空航天大学学报, 2018, 44(8): 1739-1747. doi: 10.13700/j.bh.1001-5965.2017.0600ZHU C C, LIANG X L, ZHANG J Q, et al. Demonstration and verification system for UAV swarm formation control[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(8): 1739-1747(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0600 [13] REN W. Consensus strategies for cooperative control of vehicle formations[J]. IET Control Theory & Applications, 2007, 1(2): 505-512. http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=4123991 [14] WANG Y, CHENG Z H, XIAO M. UAV's formation keeping control based on multi-agent system consensus[J]. IEEE Access, 2020, 8: 49000-49012. doi: 10.1109/ACCESS.2020.2979996 [15] CHEN Y Y, YU R, ZHANG Y, et al. Circular formation flight control for unmanned aerial vehicles with directed network and external disturbance[J]. IEEE/CAA Journal of Automatica Sinica, 2020, 7(2): 505-516. doi: 10.1109/JAS.2019.1911669 [16] 梁晓龙, 刘流, 何吕龙, 等. 基于固定时间一致性的无人机集群构型变换[J]. 系统工程与电子技术, 2018, 40(7): 1506-1512. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201807014.htmLIANG X L, LIU L, HE L L, et al. UAV swarm formation reconfiguration based on fixed-time consensus[J]. Systems Engineering and Electronics, 2018, 40(7): 1506-1512(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201807014.htm [17] DONG X W, YU B C, SHI Z Y, et al. Time-varying formation control for unmanned aerial vehicles theories and applications[J]. IEEE Transactions on Control Systems Technology, 2015, 23(1): 340-348. doi: 10.1109/TCST.2014.2314460 [18] 李宗刚, 赵振乾, 葛立明, 等. 基于二阶一致性算法的多仿生机器鱼分布式编队控制[J]. 控制与决策, 2019, 34(1): 31-42. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201901005.htmLI Z G, ZHAO Z Q, GE L M, et al. Distributed formation control of multiple biomimetic robotic fish based on second-order consensus algorithm[J]. Control and Decision, 2019, 34(1): 31-42(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201901005.htm [19] 何吕龙, 张佳强, 侯岳奇, 等. 有向通信拓扑和时延条件下的无人机集群时变编队控制[J]. 北京航空航天大学学报, 2020, 46(2): 314-323. doi: 10.13700/j.bh.1001-5965.2019.0206HE L L, ZHANG J Q, HOU Y Q, et al. Time-varying formation control for UAV swarm with directed interaction topology and communication delay[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2): 314-323(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0206 [20] 石晓航, 张庆杰, 吕俊伟, 等. 一类复杂通信条件下高阶线性群系统编队控制[J]. 北京航空航天大学学报, 2020, 46(4): 769-780. doi: 10.13700/j.bh.1001-5965.2019.0302SHI X H, ZHANG Q J, LV J W, et al. Formation control for high-order linear swarm systems with complex communication conditions[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 769-780(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0302 [21] WEI R, RANDEL W B. Consensus seeking in multi-agent systems under dynamically changing interaction topologies[J]. IEEE Transactions on Automatic Control, 2005, 50(5): 655-661. [22] STEPHEN B, LAURENT E G, ERIC F, et al. Linear matrix inequalities in system and control theory[M]. Philadelphia: Society for Industrial and Applied Mathematics, 1994. [23] 孙健, 陈杰, 刘国平. 时滞系统稳定性分析与应用[M]. 北京: 科学出版社, 2012.SUN J, CHEN J, LIU G P. Stability analysis and application of time delay system[J]. Beijing: Science Press, 2012(in Chinese). [24] DONG X, XI J, LU G, et al. Formation control for high-order linear time-invariant multi-agent systems with time delays[J]. IEEE Transactions on Control of Network Systems, 2014, 1(3): 232-240. http://ieeexplore.ieee.org/document/6851896 [25] DMITRY V B, MARK M K. LMI-based H∞-optimal control with transients[J]. International Journal of Control, 2010, 83(8): 1667-1673. http://www.ams.org/mathscinet-getitem?mr=2729745 [26] 周绍磊, 祁亚辉, 康宇航, 等. 有向图下考虑响应的多智能体H∞一致性控制[J]. 控制与决策, 2016, 31(11): 2053-2059. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201611020.htmZHOU S L, QI Y H, KANG Y H, et al. H∞ consensus control of multi-agent systems synthesised with transient performance in direted networks[J]. Control and Decision, 2016, 31(11): 2053-2059(in Chinese) https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201611020.htm [27] WEI L, LIU A L, ZHOU S L. Distributed H∞ control of multi-agent systems with directed networks[J]. Chinese Physics B, 2015, 24(9): 0902081-0902087. -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 1175
- HTML全文浏览量: 56
- PDF下载量: 144
- 被引次数: 0
