



-
摘要:
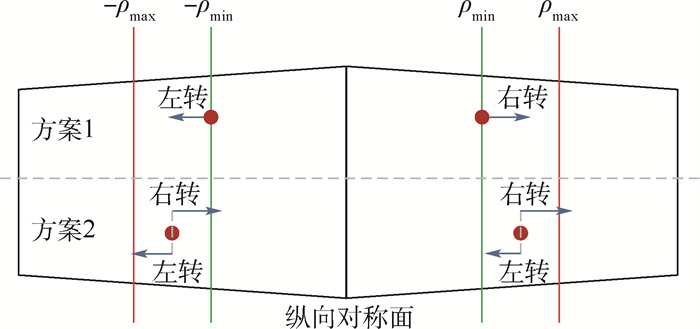
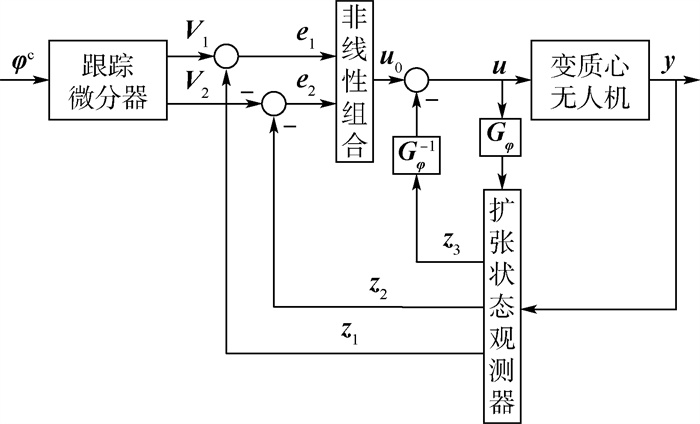
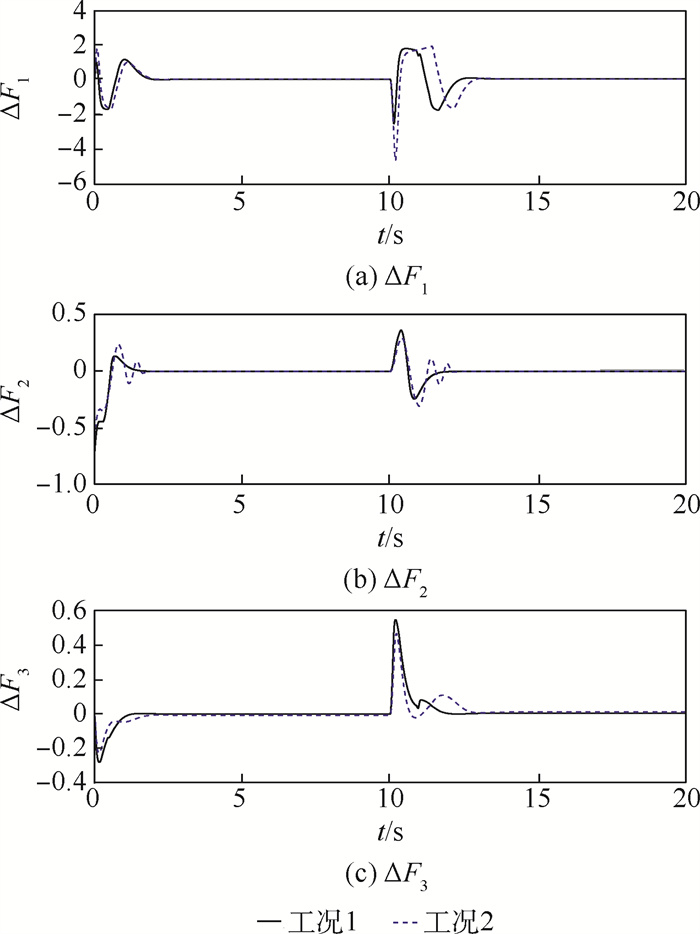
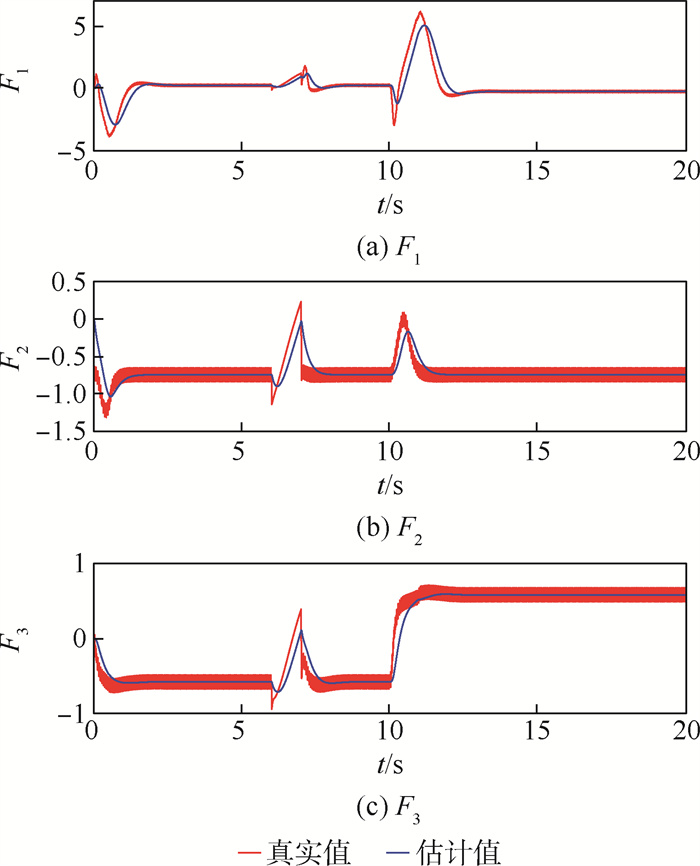
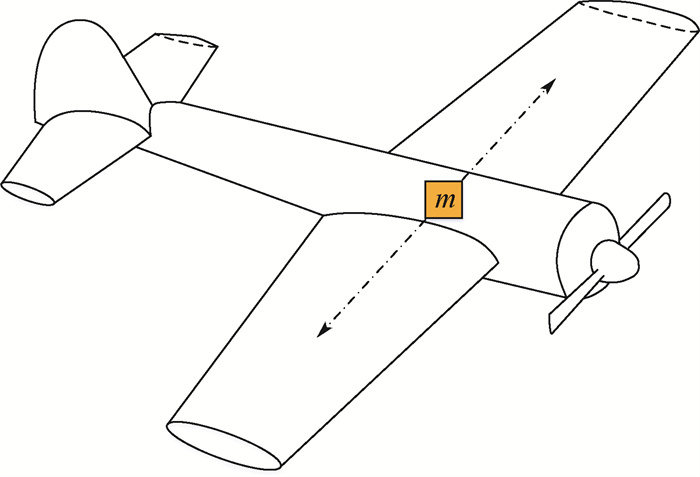
变质心无人机具有气动效率更高、隐身性能更好、机翼结构更加简单等优点。提出了时滞更小、结构更加简单的单滑块变质心无人机布局方案,分析了滑块参数对变质心无人机动力学特性的影响,在此基础上给出了滑块的理想安装位置,并研究了变质心无人机布局方案控制效率随速度的变化情况。针对变质心无人机强耦合、强非线性的特点,基于粒子群算法(PSO)设计了自抗扰控制器(ADRC),其中扩张状态观测器估计出包含耦合和参数摄动的总和扰动项,并基于此进行动态补偿。仿真结果验证了所设计控制器的有效性和鲁棒性。
-
关键词:
- 变质心控制 /
- 固定翼无人机 /
- 自抗扰控制(ADRC) /
- 粒子群算法(PSO) /
- 非线性动力学
Abstract:Mass-actuated UAVs have the advantages of higher aerodynamic efficiency, better stealth performance and simpler wing structure. This paper proposes a single-slider mass-actuated UAV layout scheme with smaller time delay and simpler structure, and analyzes the influence of the slider parameters on the dynamical characteristics of the UAV. On this basis, the ideal installation position of the slider is given, and the change of the control efficiency of the mass-actuated scheme with the speed is studied. Aimed at the characteristics of strong coupling and nonlinearity of the mass-actuated UAV, an active disturbance rejection controller (ADRC) is designed based on the particle swarm optimization algorithm (PSO). The expanded state observer estimates the total disturbance term including coupling and parameter perturbation, and performs dynamical compensation at the same time. The simulation results confirm that the designed controller has good robustness and effectiveness.
-
表 1 纵向运动特征根
Table 1. Eigenvalues of longitudinal motion
z1b/m 特征根 长周期运动 短周期运动 -0.2 0.689 3, -0.499 1 -2.783 0±5.747 4j 0 -0.285 0±0.165 4j -2.492 3±6.850 7j 0.2 -0.594 6±0.348 6j -2.093 8±6.745 6j  下载: 导出CSV
下载: 导出CSV
表 2 横向运动特征根
Table 2. Eigenvalues of lateral motion
z1b/m 特征根 滚转模态 荷兰滚模态 螺旋模态 -0.2 -12.270 7 -5.850 1±10.179 4j 0.401 0 0 -13.545 1 -5.825 1±10.133 8j -0.129 4 0.2 -11.336 6 -5.897 3±10.038 7j -0.714 3
下载: 导出CSV
表 3 无人机参数
Table 3. Parameters of UAV
参数 数值 mS/kg 20 Sref/m2 0.55 b/m 2.895 6 c/m 0.189 9 Jx, Jy, Jz/(kg·m2) 1.135, 0.824, 1.759 Sprop/m2 0.202 7 kmotor 80 Cprop 1.0
下载: 导出CSV
-
[1] ERTURK S A, DASKIRAN O, DOGAN A. Trim analysis of a moving-mass actuated airplane[C]//AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2012. [2] EL-GOHARY A I, TAWFIK T S. Optimal control of the rotational motion of a rigid body using moving masses[J]. Applied Mathematics and Computation, 2004, 153(2): 453-465. doi: 10.1016/S0096-3003(03)00645-3 [3] HE L, CHEN X, KUMAR K D, et al. A novel three-axis attitude stabilization method using in-plane internal mass-shifting[J]. Aerospace Science and Technology, 2019, 92: 489-500. doi: 10.1016/j.ast.2019.06.019 [4] HUANG H, ZHOU J. Solar sailing CubeSat attitude control method with satellite as moving mass[J]. Acta Astronautica, 2019, 159: 331-341. doi: 10.1016/j.actaastro.2019.03.077 [5] JUNG W, MAZZOLENI A P, CHUNG J. Dynamic analysis of a tethered satellite system with a moving mass[J]. Nonlinear Dynamics, 2014, 75(1-2): 267-281. doi: 10.1007/s11071-013-1064-8 [6] WOOLSEY C A, LEONARD N E. Stabilizing underwater vehicle motion using internal rotors[J]. Automatica, 2002, 38(12): 2053-2062. doi: 10.1016/S0005-1098(02)00136-X [7] LI B, SU T C. Heading autopilot of autonomous underwater vehicles with internal moving mass[J]. Journal of Computational and Nonlinear Dynamics, 2017, 12(2): 021003. doi: 10.1115/1.4034727 [8] LI Q, XIE S, LUO J, et al. Pitch reduction system design and control for an underwater vehicle[C]//IEEE International Conference on Mechatronics and Automation. Piscataway: IEEE Press, 2014: 14547083. [9] WOOLSEY C A, LEONARD N E. Moving mass control for underwater vehicles[C]//Proceedings of the 2002 American Control Conference. Piscataway: IEEE Press, 2002: 7426172. [10] LI J, GAO C, FENG T, et al. Novel moving mass flight vehicle and its equivalent experiment[J]. Journal of Dynamic Systems Measurement and Control, 2018, 140(11): 111010. doi: 10.1115/1.4040326 [11] LI J, GAO C, JING W, et al. Dynamic analysis and control of novel moving mass flight vehicle[J]. Acta Astronautica, 2017, 131: 36-44. doi: 10.1016/j.actaastro.2016.11.023 [12] PETSOPOULOS T, REGAN F, BARLOW J. A moving-mass roll control system for a fixed-trim re-entry vehicle[C]//32nd Aerospace Sciences Meeting and Exhibit. Reston: AIAA, 1994. [13] ROBINETT R D, STURGIS B R, KERR S A. Moving mass trim control for aerospace vehicles[J]. Journal of Guidance, Control, and Dynamics, 1996, 19(5): 1064-1070. doi: 10.2514/3.21746 [14] ROGERS J, COSTELLO M. Control authority of a projectile equipped with a controllable internal translating mass[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(5): 1323-1333. doi: 10.2514/1.33961 [15] CALHOUN P, QUEEN E. Entry vehicle control system design for the mars smart lander[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit. Reston: AIAA, 2002. [16] 陈丽, 周革, 段登平. 平流层飞艇变质心姿态运动仿真[J]. 系统仿真学报, 2012, 24(12): 2434-2438. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201212006.htmCHEN L, ZHOU G, DUAN D P. Simulation of moving-mass control of stratospheric airship[J]. Journal of System Simulation, 2012, 24(12): 2434-2438(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ201212006.htm [17] HAUS T, ORSAG M, BOGDAN S, et al. Design considerations for a large quadrotor with moving mass control[C]//2016 International Conference on Unmanned Aircraft Systems. Piscataway: IEEE Press, 2016: 16123851. [18] HAUS T, PRKUT N, BOROVINA K, et al. A novel concept of attitude control for large multirotor-UAVs based on moving mass control[C]//2016 24th Mediterranean Conference on Control and Automation. Piscataway: IEEE Press, 2016: 16212617. [19] DOGAN A, ERTURK S A. Trimming mass-actuated airplane in turns with zero side slip angle[C]//AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2014. [20] ERTURK S A, DOGAN A. Trim analysis of a moving-mass actuated airplane in steady turn[C]//51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Reston: AIAA, 2013. [21] ERTURK S A, DOGAN A. Trim analyses of mass-actuated airplane in cruise and steady-state turn[J]. Journal of Aircraft, 2017, 54(4): 1587-1594. doi: 10.2514/1.C034200 [22] ERTURK S A, DOGAN A. Trim analyses of mass-actuated airplane in steady-state climb and descent[C]//AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2017. [23] ERTURK S A, DOGAN A. Propeller torque effect on cruise trim of standard and mass-actuated airplane[C]//AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2015. [24] ERTURK S A, DOGAN A. Propeller torque effect on steady-state turn trim of standard and mass-actuated airplane[C]//AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2016. [25] VENGATE S R, ERTURK S A, DOGAN A. Development and flight test of moving-mass actuated unmanned aerial vehicle[C]// AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2016. [26] ERTURK S A, DOGAN A. Dynamic simulation and control of mass-actuated airplane[J]. Journal of Guidance, Control, and Dynamics, 2017, 40(8): 1939-1953. doi: 10.2514/1.G002658 [27] BEARD R W, MCLAIN T W. Small unmanned aircraft: Theory and practice[M]. Princeton: Princeton University Press, 2012. [28] 韩京清. 从PID技术到"自抗扰控制"技术[J]. 控制工程, 2002, 9(3): 13-18. doi: 10.3969/j.issn.1671-7848.2002.03.003HAN J Q. From PID technique to active disturbances rejection control technique[J]. Control Engineering of China, 2002, 9(3): 13-18(in Chinese). doi: 10.3969/j.issn.1671-7848.2002.03.003 [29] VAN DEN BERGH F, ENGELBRECHT A P. A study of particle swarm optimization particle trajectories[J]. Information Sciences, 2006, 176(8): 937-971. doi: 10.1016/j.ins.2005.02.003 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 392
- HTML全文浏览量: 170
- PDF下载量: 97
- 被引次数: 0
