



-
摘要:
针对无先验信息条件下无人机集群的协同搜索问题,提出一种以覆盖率为引导,以机间安全距离、通信距离、偏航角调整及搜索边界等为约束的无人机集群协同搜索算法。通过建立环境地图矩阵对任务区域进行描述,进一步定义环境地图更新算子实现搜索过程中环境地图的快速更新。设计了集群协同搜索任务的回报函数,采用粒子群算法进行求解,得到每架无人机在已知环境地图下的最优决策,即决策意图。每架无人机在获取其他成员决策意图的基础上重新进行决策,实现协同决策。针对不同规模集群提出了集中式和分布式2种协同决策方案。仿真结果表明,所提算法能够对存在未知威胁的不规则任务区域进行有效覆盖搜索,覆盖率远高于不进行协同决策的个体决策方法。
Abstract:Aimed at the cooperative search problem of UAV swarm without prior information, a cooperative search algorithm of UAV swarm is proposed, which is guided by coverage rate and constrained by safe distance, communication distance, yaw angle adjustment and search boundary. The task area is described by establishing the environmental map matrix, and the environmental map update operator is further defined to realize the rapid update of the environmental map in the search process. The return function of swarm cooperative search task is designed, and particle swarm optimization algorithm is used to solve the problem in order to obtain the optimal decision of each UAV under the known environment map, namely the decision intention. Each UAV makes decisions again based on acquiring the decision-making intentions of other members to achieve cooperative decision-making. Two cooperative decision-making schemes, centralized and distributed, are proposed for swarms with different scales. The simulation results show that the proposed algorithm can effectively search the irregular task area with unknown threat, and the coverage is much higher than that of the individual decision method without cooperative decision.
-

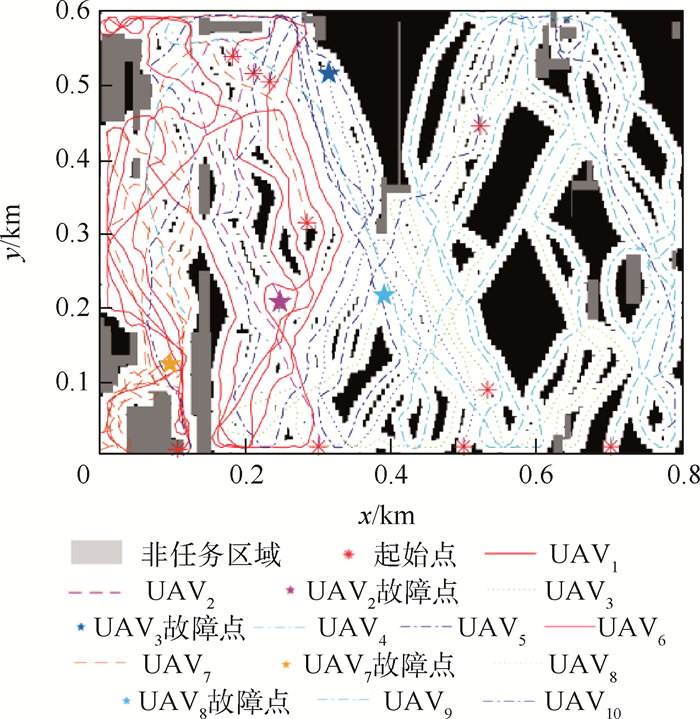
图 12 10架UAV集群协同搜索仿真结果
Figure 12. Collaborative search simulation results for swarm with 10 UAVs
表 1 环境地图融合算子运算规则
Table 1. Environmental map fusion operator operation rules
gi(k) gj(k) 0 -1 +1 0 0 0 0 -1 0 -1 +1 +1 0 +1 +1  下载: 导出CSV
下载: 导出CSV
表 2 算法参数
Table 2. Algorithm parameters
参数 ω1 ω2 ω3 ω4 ω5 ds/m dc/m 数值 0.3 0.2 0.2 0.1 0.2 20 500
下载: 导出CSV
-
[1] US Department of Defense. Unmanned aircraft systems roadmap 2005-2030[R]. Washington, D.C. : US Department of Defense, 2005: 1-3. [2] US Department of Defense. Unmanned aircraft systems roadmap 2007-2032[R]. Washington, D.C. : US Department of Defense, 2007: 6-12. [3] US Department of Defense. Defense science board study on unmanned aerial vehicles and uninhabited combat aerial vehicles[R]. Washington, D.C. : US Department of Defense, 2004: 1-4. [4] ALSHULER Y, PENTLAND A, BRUCKSTEIN A M. Swarms and network intelligence in search[M]. Berlin: Springer, 2018: 1-2. [5] 梁晓龙, 孙强, 尹忠海, 等. 大规模无人系统集群智能控制方法综述[J]. 计算机应用研究, 2015, 32(1): 11-16. doi: 10.3969/j.issn.1001-3695.2015.01.003LIANG X L, SUN Q, YIN Z H, et al. Review on large-scale unmanned system swarm intelligence control method[J]. Application Research of Computers, 2015, 32(1): 11-16(in Chinese). doi: 10.3969/j.issn.1001-3695.2015.01.003 [6] 梁晓龙, 张佳强, 祝捷, 等. 基于CPS的空中交通系统架构及能力涌现方法[J]. 空军工程大学学报(自然科学版), 2016, 17(1): 1-7. doi: 10.3969/j.issn.1009-3516.2016.01.001LIANG X L, ZHANG J Q, ZHU J, et al. Air traffic control system architecture and ability emergence method based on cyber-physcial system[J]. Journal of Air Force Engineering University(Natural Science Edition), 2016, 17(1): 1-7(in Chinese). doi: 10.3969/j.issn.1009-3516.2016.01.001 [7] 吴文超, 黄长强, 宋磊, 等. 不确定环境下的多无人机协同搜索航路规划[J]. 兵工学报, 2011, 32(11): 1337-1342. https://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201111007.htmWU W C, HUANG C Q, SONG L, et al. Cooperative search and path planning of multi-unmanned air vehicles in uncertain environment[J]. Acta Armamentarii, 2011, 32(11): 1337-1342 (in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201111007.htm [8] ZHAO Z Y, LU G S. Receding horizon control for cooperative search of multi-UAVs based on differential evolution[J]. International Journal of Intelligent Computing and Cybernetics, 2012, 5(1): 145-158. doi: 10.1108/17563781211208260 [9] 李星烨. 多无人机协同区域搜索关键技术研究[D]. 成都: 电子科技大学, 2020: 1-6.LI X Y. Research on technologies of multi-UAV cooperative area search[D]. Chengdu: University of Electronic Science and Technology, 2020: 1-6(in Chinese). [10] PEHLIVANOGLU Y V. A new vibrational genetic algorithm enhanced with a Voronoi diagram for path planning of autonomous UAV[J]. Aerospace Science and Technology, 2012, 16(1): 47-55. doi: 10.1016/j.ast.2011.02.006 [11] GURUPRASAD K R, GHOSE D. Automated multi-agent search using centroidal Voronoi configuration[J]. IEEE Transactions on Automation Science and Engineering, 2011, 8(2): 420-423. doi: 10.1109/TASE.2010.2072920 [12] 谢朋志, 魏晨. 单侧区域分割的多无人机扫描线搜索方法研究[J]. 航空兵器, 2020, 27(3): 67-72. https://www.cnki.com.cn/Article/CJFDTOTAL-HKBQ202003010.htmXIE P Z, WEI C. Research on scanning line search method for multi-UAV based on unilateral region segmentation[J]. Aero Weaponry, 2020, 27(3): 67-72(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKBQ202003010.htm [13] 于驷男, 周锐, 夏洁, 等. 多无人机协同搜索区域分割与覆盖[J]. 北京航空航天大学学报, 2015, 41(1): 167-173. doi: 10.13700/j.bh.1001-5965.2014.0056YU S N, ZHOU R, XIA J, et al. Decomposition and coverage of multi-UAV cooperative search area[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(1): 167-173(in Chinese). doi: 10.13700/j.bh.1001-5965.2014.0056 [14] 刘重, 高晓光, 符小卫. 带信息素回访机制的多无人机分布式协同目标搜索[J]. 系统工程与电子技术, 2017, 39(9): 1999-2010. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201709013.htmLIU C, GAO X G, FU X W. Multi-UAVs distributed cooperative target search algorithm with controllable revisit mechanism based on digital pheromone[J]. Systems Engineering and Electronics, 2017, 39(9): 1999-2010(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201709013.htm [15] 沈东, 魏瑞轩, 祁晓明, 等. 基于MTPM和DPM的多无人机协同广域目标搜索滚动时域决策[J]. 自动化学报, 2014, 40(7): 1391-1403. https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201407014.htmSHEN D, WEI R X, QI X M, et al. Receding horizon decision method based on MTPM and DPM for multi-UAVs cooperative large area target search[J]. Acta Automatica Sinica, 2014, 40(7): 1391-1403(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201407014.htm [16] DI B, ZHOU R, DUAN H B. Potential field based receding horizon motion planning for centrality-aware multiple UAV cooperative surveillance[J]. Aerospace Science and Technology, 2015, 46(10): 386-397. [17] KHAN A, YANMAZ E, RINNER B. Information exchange and decision making in micro aerial vehicle networks for cooperative search[J]. IEEE Transactions on Control of Network Systems, 2015, 2(4): 335-347. doi: 10.1109/TCNS.2015.2426771 [18] SUJIT P B, BEARD R. Multiple UAV exploration of an unknown region[J]. Annals of Mathematics and Artificial Intelligence, 2008, 52(2): 335-366. [19] 张莹莹, 周德云, 夏欢. 不确定环境下多无人机协同搜索算法研究[J]. 电光与控制, 2012, 19(2): 5-8. https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201202004.htmZHANG Y Y, ZHOU D Y, XIA H. Cooperative search algorithm for multi-UAV in uncertain environment[J]. Electronics Optics and Control, 2012, 19(2): 5-8(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201202004.htm [20] 吴傲, 杨任农, 梁晓龙, 等. 基于信息素决策的无人机集群协同搜索算法[J]. 北京航空航天大学学报, 2021, 47(4): 814-827. doi: 10.13700/j.bh.1001-5965.2020.0026WU A, YANG R N, LIANG X L, et al. Cooperative search algorithm based on pheromone decision for UAV swarm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(4): 814-827(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0026 [21] 侯岳奇, 梁晓龙, 何吕龙, 等. 未知环境下无人机集群协同区域搜索算法[J]. 北京航空航天大学学报, 2019, 45(2): 347-356. doi: 10.13700/j.bh.1001-5965.2018.0230HOU Y Q, LIANG X L, HE L L, et al. Cooperative area search algorithm for UAV swarm in unknown environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2): 347-356(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0230 [22] 李春. 无人机集群自主协同搜索方法研究[D]. 杭州: 浙江大学, 2019: 1-8.LI C. Research on autonomous cooperative search using UAV swarms[D]. Hangzhou: Zhejiang University, 2019: 1-8(in Chinese). [23] 彭辉, 沈林成, 朱华勇. 基于分布式模型预测的多UAV协同区域搜索[J]. 航空学报, 2010, 31(3): 593-601. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201003029.htmPENG H, SHEN L C, ZHU H Y. Multiple UAV cooperative area search based on distributed model predictive control[J]. Acta Aeronautica et Sinica, 2010, 31(3): 593-601(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201003029.htm [24] 符小卫, 魏广伟, 高晓光. 不确定环境下多无人机协同区域搜索算法[J]. 系统工程与电子技术, 2016, 38(4): 821-827.FU X W, WEI G W, GAO X G. Cooperative area search algorithm for multi-UAVs in uncertainty environment[J]. Systems Engineering and Electronics, 2016, 38(4): 821-827(in Chinese). [25] 付其喜, 梁晓龙, 张佳强, 等. 自主飞行无人机地理围栏算法设计与实现[J]. 西安交通大学学报, 2019, 53(5): 167-175. https://www.cnki.com.cn/Article/CJFDTOTAL-XAJT201905022.htmFU Q X, LIANG X L, ZHANG J Q, et al. Design and implementation of autonomous flight unmanned aircraft system geo-fence algorithm[J]. Journal of Xi'an Jiaotong University, 2019, 53(5): 167-175(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XAJT201905022.htm -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数: 360
- HTML全文浏览量: 89
- PDF下载量: 77
- 被引次数: 0
