



-
摘要:
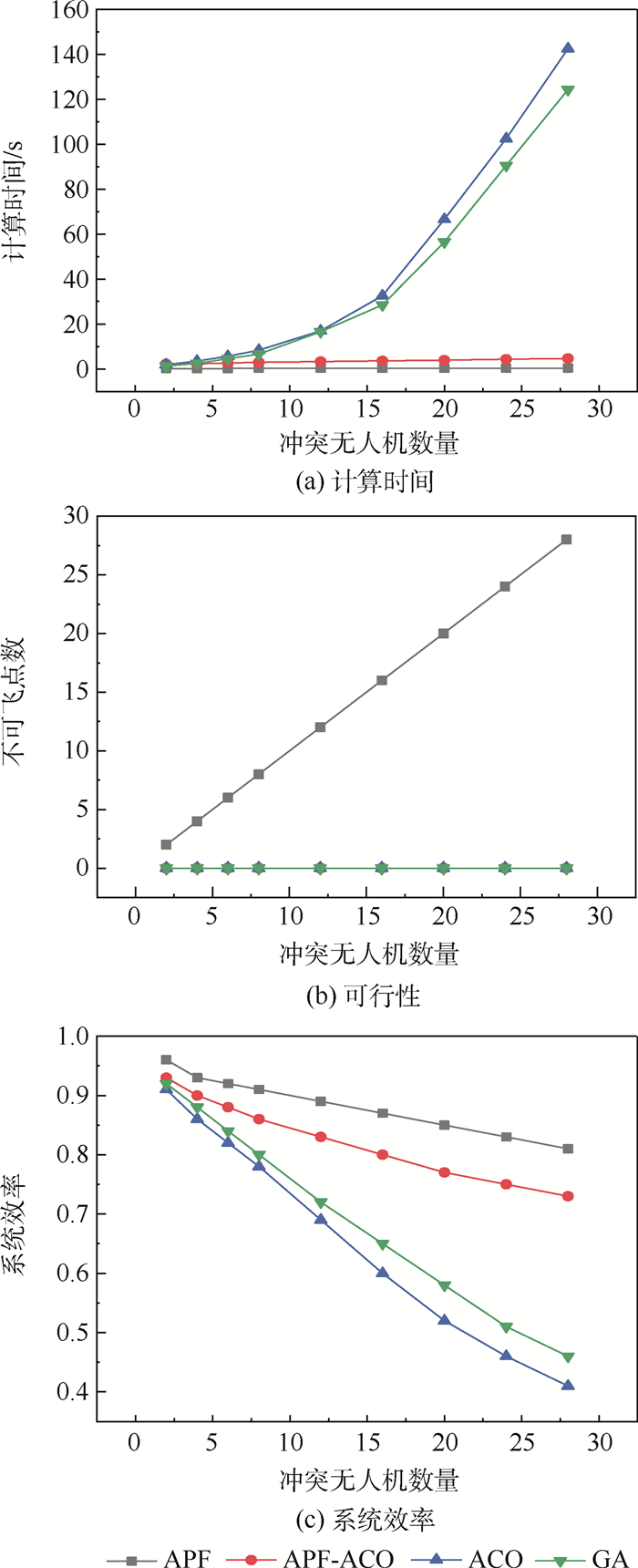
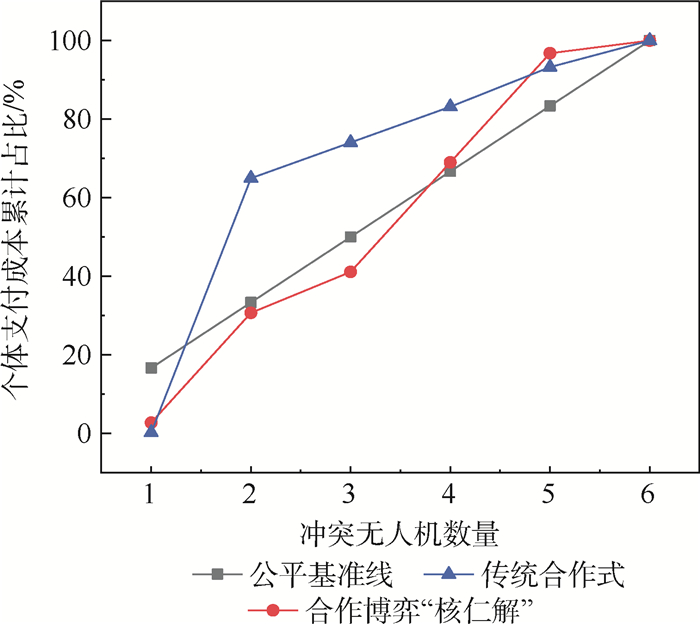
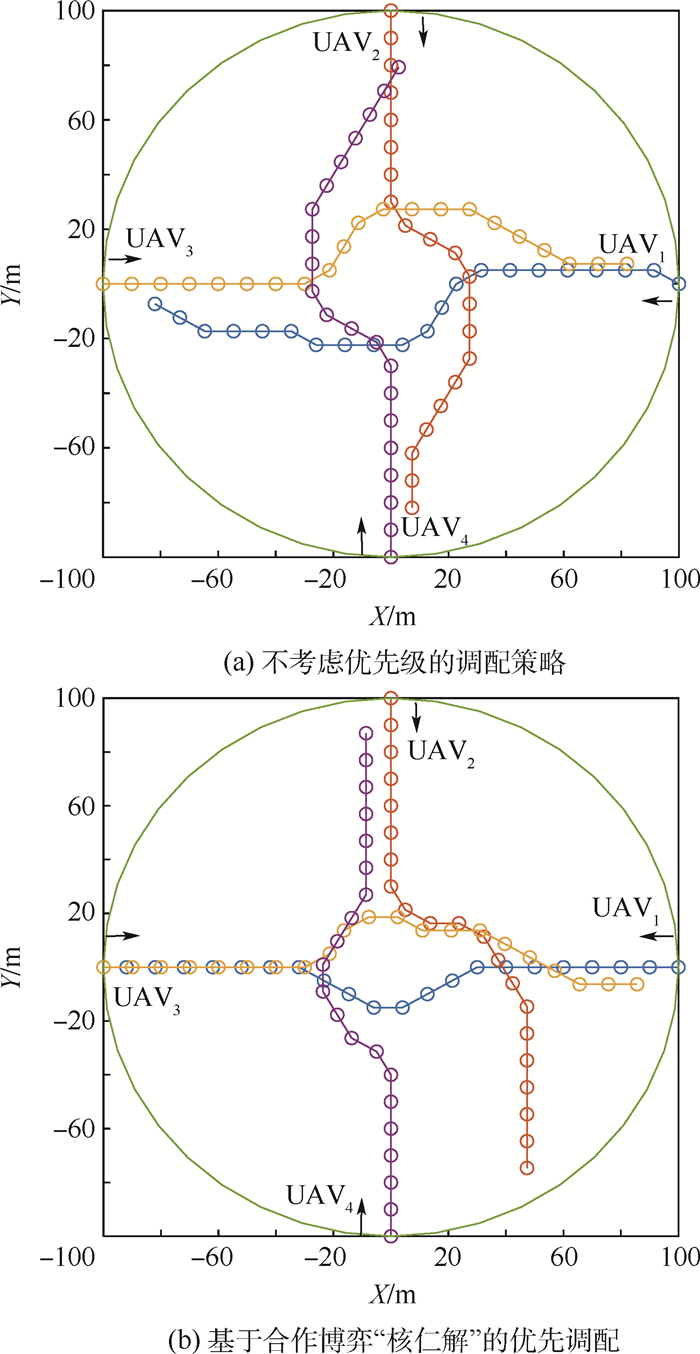
为解决低空无人机冲突解脱过程中个体支付成本不公平问题,提出了基于合作博弈“核仁解”概念的多机冲突解脱算法。针对低空多机冲突场景的特点,基于“核仁解”概念,建立无人机冲突解脱支付矩阵。结合人工势场法与蚁群算法的优点,提出基于人工势场法-蚁群算法(APF-ACO)的冲突解脱混合求解策略。仿真结果表明:综合计算时间、可行性与系统效率3个评价指标,APF-ACO混合求解策略效能最优;基于合作博弈“核仁解”的求解策略在一定程度上可提升个体公平性;同时能够在牺牲少量整体利益的前提下,拥有优先级无人机的快速规划达到目标。
-
关键词:
- 无人机 /
- 冲突解脱 /
- 合作博弈 /
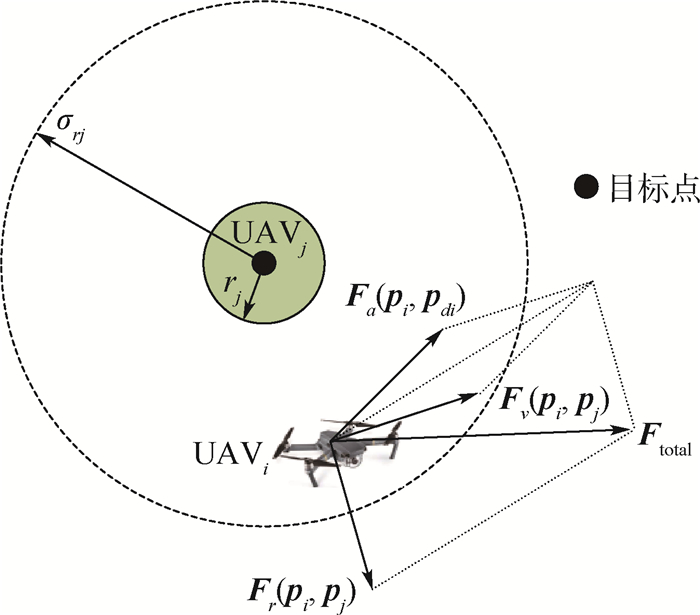
- 人工势场法(APF) /
- 蚁群算法(ACO)
Abstract:In order to solve the problem of inequity of individual cost in conflict resolution of low-altitude UAV, a multi-aircraft conflict resolution algorithm based on the concept of "nucleolus solution" in cooperative game is proposed. According to the characteristics of low-altitude multi-aircraft conflict scenarios, based on the "nucleolus solution" concept, the UAV conflict resolution payment matrix is established. Combined with the advantages of artificial potential field method and ant colony optimization, a hybrid conflict resolution strategy based on artificial potential field-ant colony optimization (APF-ACO) is proposed. The simulation results show that the APF-ACO hybrid solution strategy has the best performance by integrating the three evaluation indexes of calculation time, feasibility and system efficiency. The solution strategy based on cooperative game "nucleolus solution" can improve individual fairness to a certain extent. At the same time, the priority UAV can be quickly planned to achieve the goal at the expense of a small amount of overall benefits.
-

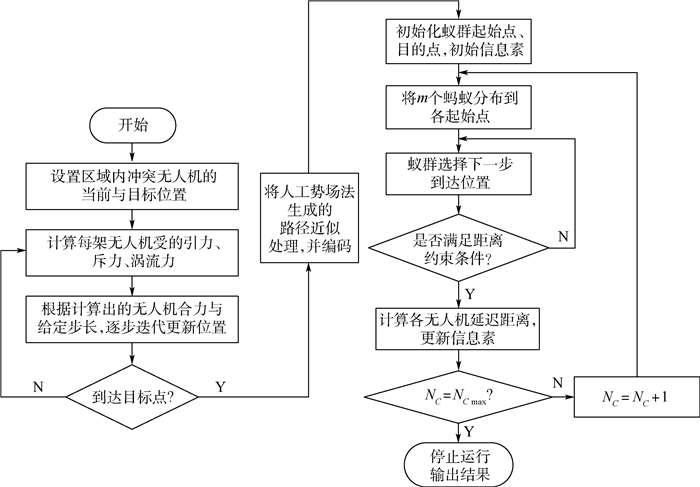
图 4 基于APF-ACO算法的多机冲突解脱流程
Figure 4. Multi-aircraft conflict resolution process based on APF-ACO algorithm

图 8 冲突解脱求解策略性能对比
Figure 8. Performance comparison of conflict resolution solution strategies

图 9 两种冲突解脱策略下个体公平度对比
Figure 9. Comparison of individual fairness between two conflict resolution strategies
表 1 仿真参数设置
Table 1. Simulation parameter setting
参数 数值 参数 数值 d/m 20 α 100 kri 1 m 60 kvi 1 ρ 0.8 ki/(m·s-1) 10 Q 500 rj/m 3 NCmax 50 σrj/m 50 L 20  下载: 导出CSV
下载: 导出CSV
表 2 两种冲突解脱策略性能对比
Table 2. Performance comparison of two conflict resolution strategies
求解策略 个体支付成本υ/m UAV1 UAV2 UAV3 UAV4 UAV5 UAV6 合作博弈“核仁解” 6.119 2 62.542 3 23.304 0 62.374 0 62.092 8 7.259 3 传统合作式 117.294 3 32.746 2 21.049 4 21.049 4 23.304 0 15.624 0
下载: 导出CSV
表 3 两种无人机优先级调配策略下的个体支付成本
Table 3. Individual payment costs of two UAV priority allocation strategies
UAV 个体支付成本υ/m 不考虑优先级的调配策略 基于合作博弈“核仁解”的优先调配 UAV1 19.467 3 8.038 5 UAV2 19.516 7 53.687 1 UAV3 20.890 5 15.713 9 UAV4 20.890 5 15.652 5 总计 80.765 93.092
下载: 导出CSV
-
[1] SHAKHATREH H, SAWALMEH A, ALFUQAHA A, et al. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges[J]. IEEE Access, 2019, 7: 48572-48634. doi: 10.1109/ACCESS.2019.2909530 [2] TANG X M, JI X Q, LI T. Key technology in multi-UAV conflict detection and resolution strategy[J]. Transactions of Nanjing University of Aeronautics and Astronautics, 2020, 37(2): 175-186. [3] PEREZ-CARABAZA S, BESADA-PORTAS E, LOPEZ-OROZCO J A, et al. Ant colony optimization for multi-UAV minimum time search in uncertain domains[J]. Applied Soft Computing, 2018, 62(2): 789-806. [4] 管祥民, 吕人力. 基于混合人工势场与蚁群算法的多飞行器冲突解脱方法[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(1): 28-33. doi: 10.3963/j.issn.2095-3844.2020.01.006GUAN X M, LV R L. Conflict resolution method for multiple aircraft based on hybrid artificial potential field and ant colony algorithm[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2020, 44(1): 28-33(in Chinese). doi: 10.3963/j.issn.2095-3844.2020.01.006 [5] KIM N, YOON Y. Cooperative sUAV collision avoidance based on satisficing theory[J]. International Journal of Aeronautical and Space Sciences, 2019, 20(4): 978-986. doi: 10.1007/s42405-019-00183-4 [6] 付其喜, 梁晓龙, 张佳强, 等. 双层优化的多无人机合作式冲突探测与解脱[J]. 哈尔滨工业大学学报, 2020, 52(4): 74-83. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX202004011.htmFU Q X, LIANG X L, ZHANG J Q, et al. Cooperative conflict detection and resolution for multiple UAVs using two-layer optimization[J]. Journal of Harbin Institute of Technology, 2020, 52(4): 74-83(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX202004011.htm [7] CAI J L, ZHANG N. Mixed integer nonlinear programming for aircraft conflict avoidance by applying velocity and altitude changes[J]. Arabian Journal for Science and Engineering, 2019, 44(10): 8893-8903. doi: 10.1007/s13369-019-03911-w [8] HERNÁNDEZ-ROMERO E, VALENZUELA A, RIVAS D. Probabilistic multi-aircraft conflict detection and resolution considering wind forecast uncertainty[J]. Aerospace Science and Technology, 2020, 105: 1-17. [9] 钱晓鹏, 张洪海, 田宇, 等. 基于核仁解的低空无人机协作冲突解脱算法[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(4): 676-681. doi: 10.3963/j.issn.2095-3844.2020.04.017QIAN X P, ZHANG H H, TIAN Y, et al. Cooperative conflict resolution algorithm for low-altitude drone based on nucleolus[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2020, 44(4): 676-681(in Chinese). doi: 10.3963/j.issn.2095-3844.2020.04.017 [10] SCHMEIDLER D. The nucleolus of a characteristic function game[J]. SIAM Journal of Applies Mathematics, 1969, 17: 1163-1170. doi: 10.1137/0117107 [11] ZHANG X, SUN H, XU G J, et al. On the core, nucleolus and bargaining sets of cooperative games with fuzzy payoffs[J]. Journal of Intelligent & Fuzzy Systems, 2019, 36(6): 6129-6142. [12] SZIKLAI B, FLEINER T, SOLYMOSI T. On the core and nucleolus of directed acyclic graph games[J]. Mathematical Programming, 2017, 163: 243-271. doi: 10.1007/s10107-016-1062-y [13] BERGSTRESSER K, YU P L. Domination structures and multicriteria problems in n-person games[J]. Theory and Decision, 1977, 8(1): 5-48. doi: 10.1007/BF00133085 [14] YI Z W, LI L H, QU X, et al. Using artificial potential field theory for a cooperative control model in a connected and automated vehicles environment[J]. Transportation Research Record, 2020, 2674(9): 1005-1018. doi: 10.1177/0361198120933271 [15] LI D F, PAN Z H, DENG H B. Two-dimensional obstacle avoidance control algorithm for snake-like robot in water based on immersed boundary-lattice Boltzmann method and improved artificial potential field method[J]. Transactions of the Institute of Measurement and Control, 2020, 42(10): 1840-1857. doi: 10.1177/0142331219897992 [16] STODOLA P, MICHENKA K, NOHEL J, et al. Hybrid algorithm based on ant colony optimization and simulated annealing applied to the dynamic traveling salesman problem[J]. Entropy, 2020, 22(8): 1-28. [17] ADEBAYO K J, ADERIBIGBE F M, DELE-ROTIMI A O. On the development of a hybridized ant colony optimization (HACO) algorithm[J]. American Journal of Computational Mathematics, 2019, 9(4): 358-372. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 573
- HTML全文浏览量: 270
- PDF下载量: 63
- 被引次数: 0
