



Intelligent virtual opponent decision making and guidance method in short-range air combat training
-
摘要:
针对近距空战训练中智能虚拟对手攻防博弈的自主决策与占位导引问题,提出了基于动态贝叶斯网络(DBN)和约束梯度法的智能虚拟对手决策和导引一体化方法。结合空间占位态势、火控攻击区和机动动作识别结果等信息,建立近距空战决策动态贝叶斯网络模型,实现根据战场动态环境变化的占位导引指标决策。针对在线识别的各类目标机动动作,建立轨迹预测模型,实现目标轨迹的实时预测。根据占位导引指标和目标预测轨迹,考虑飞行性能约束,采用约束梯度法计算智能虚拟对手的优化占位导引量。实现了近距空战智能虚拟对手空间占位决策与导引量计算的无缝结合。近距空战仿真实验结果表明:所提方法能够实现智能虚拟对手的合理化自主决策和占位导引,克服了传统方法实现机动动作方式固化的问题,具备较好的实时性和优化性。
Abstract:To train pilots' short-range air combat skills, the traditional way based on flight simulation technology is to have multiple pilots operate multiple fighter simulators at the same time. If an intelligent virtual opponent is used to assist pilots in confrontation training, not only could the normal training process without other pilots be guaranteed, but the training cost could also be reduced to a great extent. In this paper, an integrated method based on dynamic Bayesian network (DBN) and constrained gradient algorithm is proposed to realize autonomous decision making and space occupancy guidance for intelligent virtual opponents in the attack and defense game during short-range air combat training. A dynamic Bayesian network model for short-range air combat decision making is established in combination with the space occupying situation, the fire control attack area and the identification results of maneuvering actions. This model realizes an intelligent selection of occupancy guidance index in accordance with the dynamic battlefield environment. A target trajectory prediction model is built for each type of maneuvers identified online to obtain the real-time prediction of the target trajectory. With the occupancy guidance index, target trajectory predication, and the flight performance constraints in consideration, a constraint gradient method is used to calculate the optimal occupancy guidance quantity of the intelligent virtual opponent. Thus, a seamless combination of space occupancy decision and guidance quantity calculation for intelligent virtual opponent is achieved. The simulation results of short-range air combat show that the proposed method can realize rational autonomous decision making and space occupancy guidance for intelligent virtual opponent, overcome the problem of solidifying the maneuver mode in traditional methods, and thus have better real time and optimization performance.
-

图 1 近距空战自主占位决策DBN模型
Figure 1. Short-range air combat autonomous occupancy decision DBN model

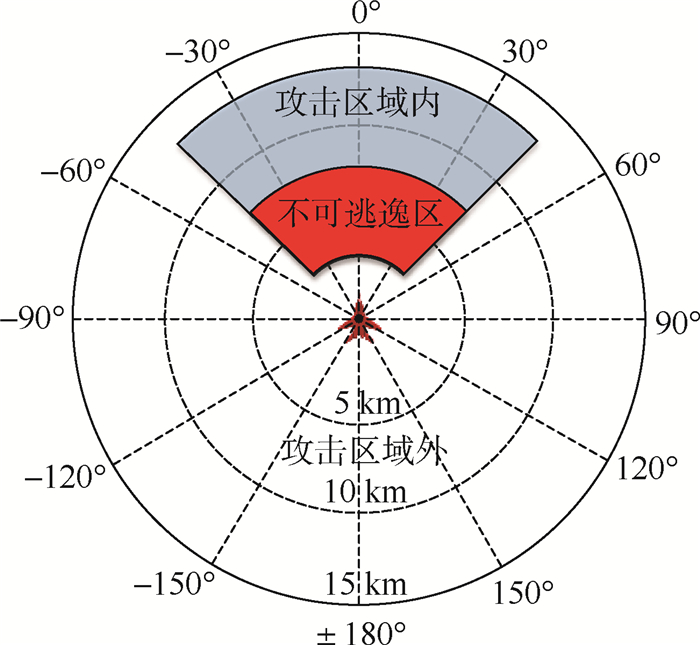
图 2 近距空战火控攻击区域包络
Figure 2. Fire control attack area envelope in short-range air combat

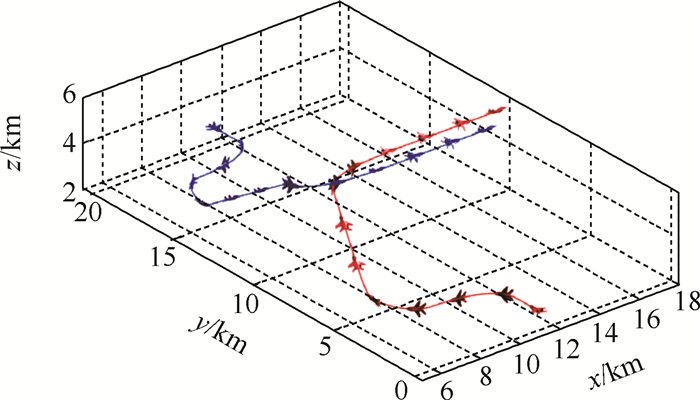
图 6 侧方态势下近距格斗对抗轨迹
Figure 6. Short-range combat confrontation trajectory under lateral status

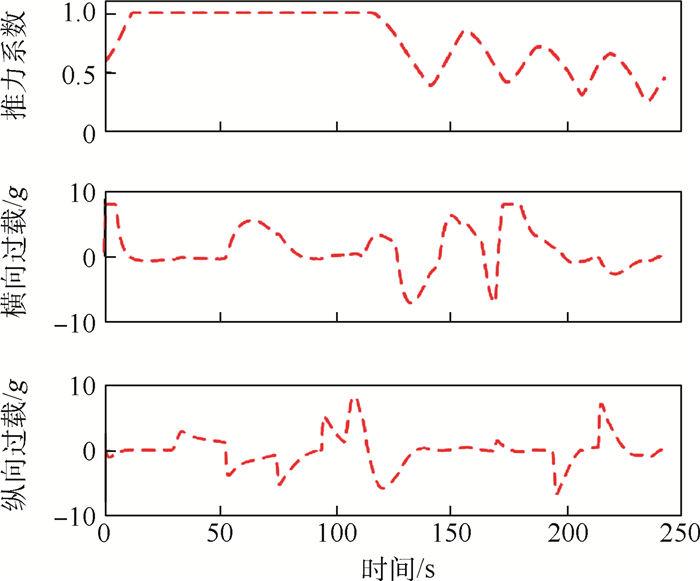
图 12 智能虚拟对手控制向量变化趋势
Figure 12. Variation trend of intelligent virtual adversary control quantity

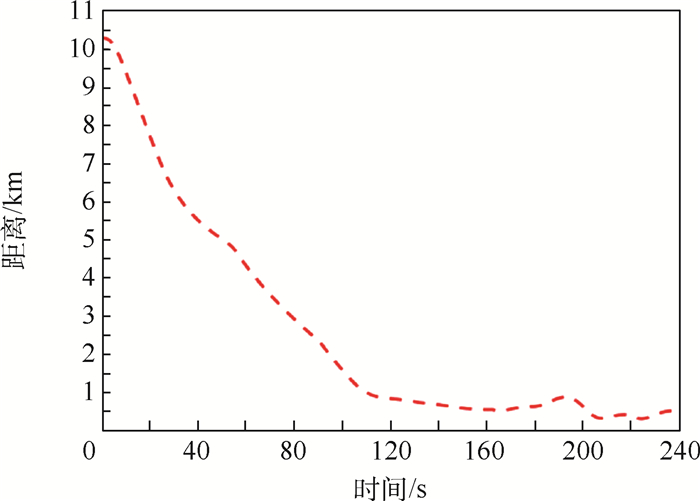
图 13 智能虚拟对手导引量变化趋势
Figure 13. Variation trend of intelligent virtual adversary guidance quantity

图 18 基于影响图对策方法的双方对抗轨迹
Figure 18. Trajectories of two opposing parties based on influence diagram game method

图 19 蓝方智能虚拟对手与红方有人机的相对态势信息
Figure 19. Relative situation information between blue intelligent virtual adversary and red manned aircraft
表 1 近距空战自主占位决策模型节点及状态集定义
Table 1. Description of node and state set of short-range air combat autonomous occupancy decision model
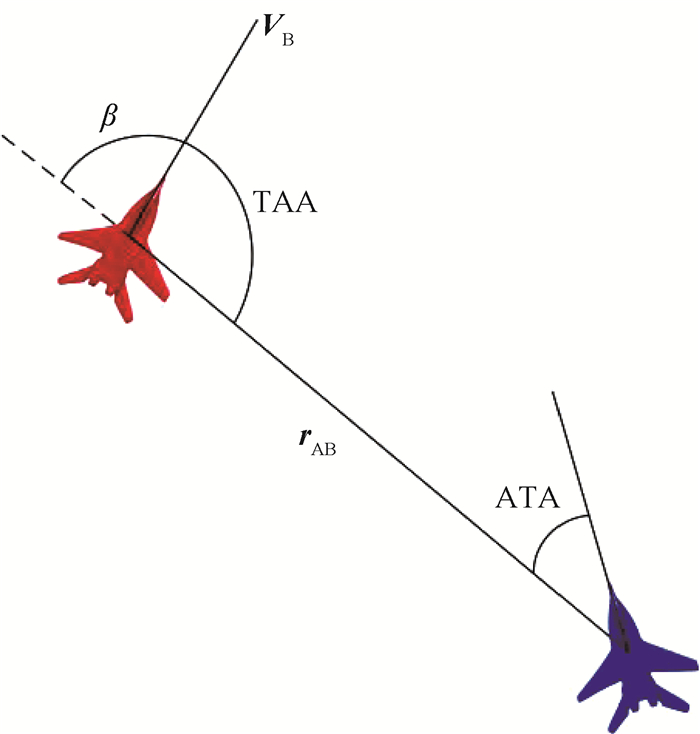
节点 状态集 ATA(目标方位角) 左前方(30°~90°)、右前方(-90°~-30°)、前方(-30°~30°)、后方(150°~180°、-180°~-150°)、左后方(90°~150°)、右后方(-150°~-90°) TAA(目标进入角) 左前方(30°~90°)、右前方(-90°~-30°)、前方(-30°~30°)、后方(150°~180°、-180°~-150°)、左后方(90°~150°)、右后方(-150°~-90°) RH(相对高度) 高于目标、基准面、低于目标 RD(目标距离) 近距(< 10 km)、中距(10~20 km)、远距(>20 km) MF(我方火控信息) 目标在攻击区域内、目标在不可逃逸区、目标在攻击区域外,角度条件不满足、目标在攻击区域外,距离条件不满足、目标在攻击区域外,角度和距离条件均不满足 TF(目标火控信息) 我机在攻击区域内、我机在不可逃逸区、我机在攻击区域外,角度条件不满足、我机在攻击区域外,距离条件不满足、我机在攻击区域外,角度和距离条件均不满足 MR(目标机动识别) 直线飞行、跃升、俯冲、筋斗、半筋斗翻转、蛇形机动、左盘旋、右盘旋、左战斗转弯、右战斗转弯 SA(目标空间占位) {(α, t, h, d)|α∈{ATA}, t∈{TAA}, h∈{RH}, d∈{RD}}。其中,α为目标方位角,t为目标进入角,h为相对高度,d为目标距离 TII(目标意图推理) 左后方攻击、右后方攻击、左侧方绕飞攻击、右侧方绕飞攻击、左前方逃逸、右前方逃逸、左后方分离、右后方分离 TA(威胁评估) 进攻、规避 FC(攻击和规避条件评估) 攻击角度与攻击距离均满足、攻击角度满足但攻击距离需调整、攻击距离满足但攻击角度需调整、攻击角度与攻击距离均需调整、规避角度与规避距离均满足、规避角度满足但规避距离需调整、规避距离满足但规避角度需调整、规避角度与规避距离均需调整  下载: 导出CSV
下载: 导出CSV
表 2 决策节点DR的定义
Table 2. Decision node specification of DR
节点 状态集 备注 DR
(决策结果)ATK1(距离优先攻击指标) 
智能虚拟对手具有攻击优势且攻击角度条件满足,选择距离优先攻击指标,调整两机距离达到尾后攻击条件 ATK2(角度优先攻击指标) 
智能虚拟对手具有攻击优势且攻击距离条件满足,选择角度优先攻击指标,调整目标方位角α和进入角达到尾后攻击条件 ATK3(绕飞攻击指标) 

双方均势且攻击角度、距离条件均不满足,采用绕飞攻击指标,同时调整角度和距离达到尾后攻击条件 AVD1(角度优先规避指标) 
目标具有攻击优势且满足攻击角度条件,破坏角度条件,调整目标进入角以躲避目标攻击 AVD2(距离优先规避指标) 
目标具有攻击优势且满足攻击距离条件,破坏距离条件,增大距离以躲避目标攻击 AVD3(距离和角度同时规避指标) 
目标具有攻击优势但攻击角度、距离条件均不满足,同时破坏角度、距离条件,调整距离及目标进入角来躲避目标攻击
下载: 导出CSV
表 3 红蓝双方战机初始状态信息
Table 3. Initial situation information of red and blue fighters
战机 x坐标/
kmy坐标/
km高度/
km空速/
(m·s-1)航向/
(°)红方 10 0 6 250 0 蓝方 10 -10.2 7 200 0
下载: 导出CSV
-
[1] 耿振余, 刘思彤, 李德龙. 嵌入式空战训练中虚拟智能对手的生成研究[J]. 现代防御技术, 2014, 42(3): 172-177. doi: 10.3969/j.issn.1009-086x.2014.03.030GENG Z Y, LIU S T, LI D L. Generating virtual intelligent adversary in embedded training of air combat counterwork[J]. Modern Defence Technology, 2014, 42(3): 172-177(in Chinese). doi: 10.3969/j.issn.1009-086x.2014.03.030 [2] 陈斌, 王江, 王阳. 战斗机嵌入式训练系统中的智能虚拟陪练[J]. 航空学报, 2020, 41(6): 366-380. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202006028.htmCHEN B, WANG J, WANG Y. Intelligent virtual training partn-er in embedded training system of fighter[J]. Acta Aeronauticaet Astronautica Sinica, 2020, 41(6): 366-380(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB202006028.htm [3] RODIN E Y, LIROV Y, MITTNIK S, et al. Artificial intelligence in air combat games[J]. Computers and Mathematics with Applications, 1987, 3(1): 261-274. [4] 徐光达, 吕超, 王光辉, 等. 基于双矩阵对策的UCAV空战自主机动决策研究[J]. 舰船电子工程, 2017, 37(11): 24-28. doi: 10.3969/j.issn.1672-9730.2017.11.007XU G D, LV C, WANG G H, et al. Research on UCAV autono-mous air combat maneuvering decision-making based on bi-matrix game[J]. Ship Electronic Engineering, 2017, 37(11): 24-28(in Chinese). doi: 10.3969/j.issn.1672-9730.2017.11.007 [5] SCHREIER M, WILLERT V, ADAMY J. An integrated approa-ch to maneuver-based trajectory prediction and criticality ass-essment in arbitrary road environments[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10): 2751-2766. doi: 10.1109/TITS.2016.2522507 [6] ZHONG L, TONG M A, ZHONG W. Sequential maneuvering decisions based on multi-stage influence diagram in air combat[J]. Journal of Systems Engineering and Electronics, 2007, 18(3): 551-555. doi: 10.1016/S1004-4132(07)60128-5 [7] VIRTANEN K, KARELAHTI J, RAIVIO T. Modeling air comb-at by a moving horizon influence diagram game[J]. Journal of Guidance, Control, and Dynamics, 2006, 29(5): 1080-1091. doi: 10.2514/1.17168 [8] 钟麟, 佟明安, 钟卫. 影响图对策在多机协同空战中的应用[J]. 北京航空航天大学学报, 2007, 33(4): 450-453. doi: 10.3969/j.issn.1001-5965.2007.04.017ZHONG L, TONG M A, ZHONG W. Application of multistage influence diagram game theory for multiple cooperative air combat[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(4): 450-453(in Chinese). doi: 10.3969/j.issn.1001-5965.2007.04.017 [9] VIRTANEN K, RAIVIO T, RAIMO P H. Modeling pilot's seq-uential maneuvering decisions by a multistage influence diagram[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(4): 665-677. doi: 10.2514/1.11167 [10] 常勇, 姜长生, 陈志伟. 基于模糊神经网络的多机多目标空战决策[J]. 电光与控制, 2011, 18(4): 13-17. doi: 10.3969/j.issn.1671-637X.2011.04.004CHANG Y, JIANG C S, CHEN Z W. Decision-making based on fuzzy neural network for air combat of multi-aircraft against multi-target[J]. Electronics Optics & Control, 2011, 18(4): 13-17(in Chinese). doi: 10.3969/j.issn.1671-637X.2011.04.004 [11] 钟麟, 佟明安, 张圣云. 粗糙集-神经网络集成在编队空战中的应用[J]. 系统工程与电子技术, 2006, 28(6): 881-884. doi: 10.3321/j.issn:1001-506X.2006.06.027ZHONG L, TONG M A, ZHANG S Y. Cooperative team air combat decision based on integration of rough sets and neural networks[J]. Systems Engineering and Electronics, 2006, 28(6): 881-884(in Chinese). doi: 10.3321/j.issn:1001-506X.2006.06.027 [12] MCGREW J S, HOW J P, WILLIAMS B. Air-combat strategy using approximate dynamic programming[J]. Journal of Guida-nce, Control, and Dynamics, 2010, 33(5): 1641-1654. doi: 10.2514/1.46815 [13] MA Y F, MA X L, SONG X. A case study on air combat decisi-on using approximated dynamic programming[J]. Mathematical Problems in Engineering, 2014, 10(4): 115-122. [14] 李惠峰, 易文峰, 程晓明. 基于近似动态规划的目标追踪控制算法[J]. 北京航空航天大学学报, 2019, 45(3): 597-605. doi: 10.13700/j.bh.1001-5965.2018.0353LI H F, YI W F, CHENG X M. Target tracking control algorithm based on approximate dynamic programming[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(3): 597-605(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0353 [15] 黄长强, 赵克新, 韩邦杰, 等. 一种近似动态规划的无人机机动决策方法[J]. 电子与信息学报, 2018, 40(10): 2447-2452. https://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201810023.htmHUANG C Q, ZHAO K X, HAN B J, et al. Maneuvering decision-making method of UAV based on approximate dynamic programming[J]. Journal of Electronics & Information Technology, 2018, 40(10): 2447-2452(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201810023.htm [16] 高阳阳, 余敏建, 韩其松, 等. 基于改进共生生物搜索算法的空战机动决策[J]. 北京航空航天大学学报, 2019, 45(3): 429-436. doi: 10.13700/j.bh.1001-5965.2018.0395GAO Y Y, YU M J, HAN Q S, et al. Air combat maneuver decision-making based on improved symbiotic organisms serach algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(3): 429-436(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0395 [17] IMADO F, KURODA T. Family of local solutions in a missile-aircraft differential game[J]. Journal of Guidance, Control, and Dynamics, 2011, 34(2): 583-591. doi: 10.2514/1.48345 [18] PARK H, LEE B Y, TAHK M J, et al. Differential game based air combat maneuver generation using scoring function matrix[J]. International Journal of Aeronautical and Space Sciences, 2016, 17(2): 204-213. doi: 10.5139/IJASS.2016.17.2.204 [19] 傅莉, 王晓光. 无人战机近距空战微分对策建模研究[J]. 兵工学报, 2012, 33(10): 1210-1216. https://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201210008.htmFU L, WANG X G. Research on close air combat modeling of differential games for unmanned combat air vehicles[J]. Acta Armamentarii, 2012, 33(10): 1210-1216(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BIGO201210008.htm [20] HUANG C Q, DONG K S, HUANG H Q, et al. Autonomous air combat maneuver decision using Bayesian inference and moving horizon optimization[J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 86-97. doi: 10.21629/JSEE.2018.01.09 [21] 付昭旺, 李战武, 强晓明, 等. 基于滚动时域控制的战斗机空战机动决策[J]. 电光与控制, 2013, 20(3): 20-24. doi: 10.3969/j.issn.1671-637X.2013.03.005FU Z W, LI Z W, QIANG X M, et al. Tactical decision-making method based on receding horizon control for air combat[J]. Electronics Optics & Control, 2013, 20(3): 20-24(in Chinese). doi: 10.3969/j.issn.1671-637X.2013.03.005 [22] 曲婉嘉, 周兴旺, 刘颖. 基于动态贝叶斯网络的防空雷达毁伤效果评估研究[J]. 电子设计工程, 2016, 24(6): 121-124. doi: 10.3969/j.issn.1674-6236.2016.06.037QU W J, ZHOU X W, LIU Y. Research on damage ecaluation of air defense radar based on Bayesian network[J]. Electronic Design Engineering, 2016, 24(6): 121-124(in Chinese). doi: 10.3969/j.issn.1674-6236.2016.06.037 [23] 孟光磊, 张慧敏, 朴海音, 等. 自动化飞行训练评估中的战机机动动作识别[J]. 北京航空航天大学学报, 2020, 46(7): 1267-1274. doi: 10.13700/j.bh.1001-5965.2019.0445MENG G L, ZHANG H M, PIAO H Y, et al. Recognition of fighter maneuver in automatic flight training evaluation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(7): 1267-1274(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0445 [24] 张洪钺, 王青. 最优控制理论与应用[M]. 北京: 高等教育出版社, 2006: 127-135.ZHANG H Y, WANG Q. Optimal control theory and application[M]. Beijing: Higher Education Press, 2006: 127-135(in Chinese). -

 下载:
下载:












 点击查看大图
点击查看大图

计量
- 文章访问数: 584
- HTML全文浏览量: 173
- PDF下载量: 72
- 被引次数: 0
