



-
摘要:
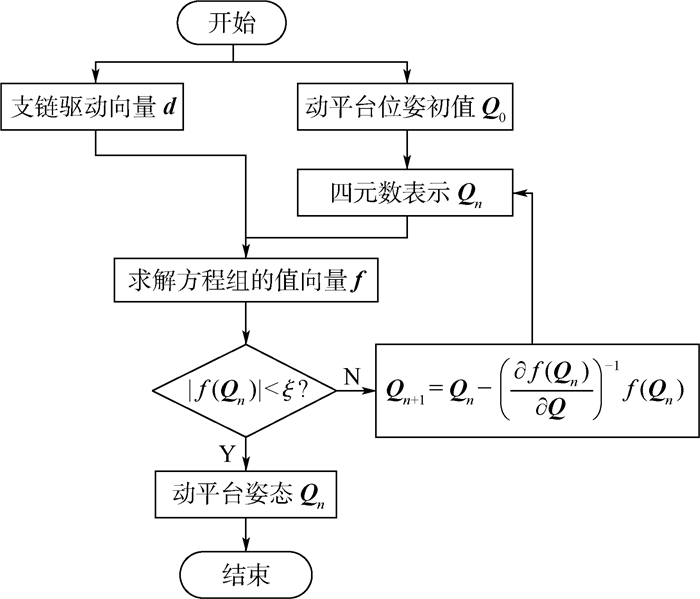
设计了一种基于6-PUS并联机构的多维力加载装置,可对目标施加多维时变载荷。首先,根据向量叠加原理和牛顿迭代法,分别推导了加载装置的运动学逆解与正解。其次,基于旋量理论,推导加载装置的速度和静力雅可比矩阵,建立动平台与各支链的运动学和静力学映射。再次,根据虚功原理,建立加载装置的动力学模型,并且通过对比Adams和MATLAB模型的仿真结果,验证动力学模型的正确性。最后,设计并完成多维力加载试验,验证加载装置的多维力加载能力,为后续的数控机床加载试验提供新的加载手段和理论基础。
Abstract:A multi-dimensional loading device based on a 6-PUS parallel mechanism was designed to apply time-varying multi-dimensional loads to target. Firstly, according to the principle of vector superposition and Newton-Raphson method, the inverse and forward kinematics of loading device were analyzed. Secondly, based on the screw theory, the velocity and static force Jacobian matrix, which represent the kinematic and static mapping between the moving platform and actuations, were derived. Thirdly, according to the principle of virtual work, the dynamic model of loading device was established and validated by comparing the actuation forces derived from Adams and MATLAB simulation models. Finally, the multi-dimensional loading tests were designed and completed to verify the multi-dimensional loading ability of the device. The loading device provides a new loading method and theoretical basis for the loading tests of numerical control machine tools.
-

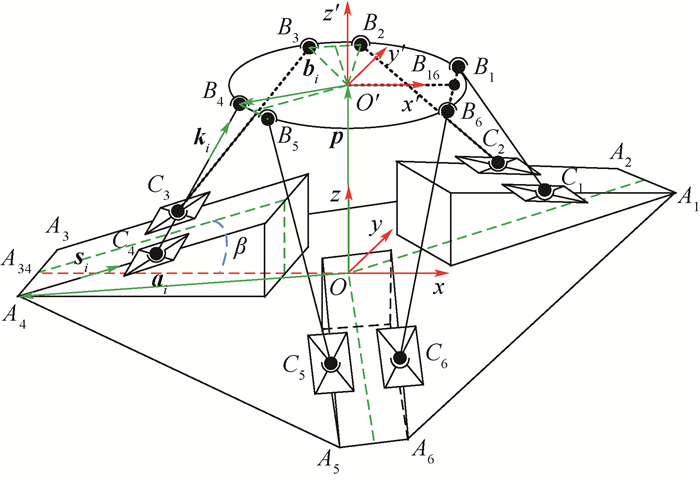
图 1 多维力加载装置结构及坐标系定义示意图
Figure 1. Schematic of structure and coordinate system definition of tested multi-dimensional loading device

图 3 支链坐标系及速度旋量分布示意图
Figure 3. Schematic of branched-chain coordinate system and velocity screw distribution

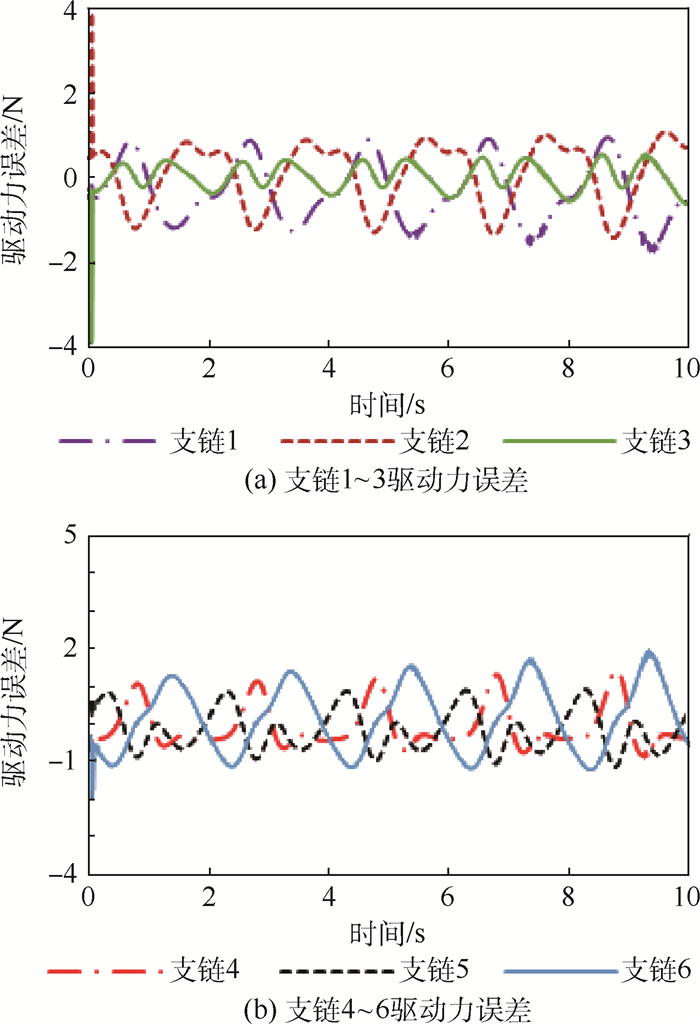
图 4 Adams与MATLAB模型所得各支链驱动力的误差
Figure 4. Deviation of branched-chain actuation forces derived from Adams and MATLAB model
-
[1] 杨兆军, 陈传海, 陈菲, 等.数控机床可靠性技术的研究进展[J].机械工程学报, 2013, 49(20):130-139. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jxxb201320019&dbname=CJFD&dbcode=CJFQYANF Z J, CHEN C H, CHEN F, et al.NC machine tool reliability technology database applications[J].Journal of Mechanical Engineering, 2013, 49(20):130-139(in Chinese). http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jxxb201320019&dbname=CJFD&dbcode=CJFQ [2] 郭江真, 王丹, 樊锐, 等.3PRS/UPS冗余驱动并联机器人刚度特性分布[J].北京航空航天大学学报, 2014, 40(4):500-506. http://bhxb.buaa.edu.cn/CN/abstract/abstract12900.shtmlGUO J Z, WANG D, FAN R, et al.Stiffness characteristics distribution of 3PRS/UPS parallel manipulator with actuation redundancy[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(4):500-506(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12900.shtml [3] GOUGH V E, WHITEHALL S G. Universal tyre test machine[C]//Proceedings of the FISITA Ninth International Technical Congress. London: Institution of Mechanical Engineers, 1962: 117-137. [4] 徐彬. 基于并联机构的多维力加载试验系统研究[D]. 哈尔滨: 哈尔滨工业大学, 2013: 10-40. http://cdmd.cnki.com.cn/Article/CDMD-10213-1014003564.htmXU B. Research on multi-DOF loading system based on parallel mechanism[D]. Harbin: Harbin Institute of Technology, 2013: 10-40(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10213-1014003564.htm [5] 刘少欣, 王丹, 陈五一.6-UPS并联多维力加载装置的动力学建模及简化[J].机床与液压, 2014, 42(19):5-8. doi: 10.3969/j.issn.1001-3881.2014.19.002LIU S X, WANG D, CHEN W Y.Dynamics modeling and simplification of a 6-UPS parallel multi-dimensional loading device[J].Machine Tool and Hydraulics, 2014, 42(19):5-8(in Chinese). doi: 10.3969/j.issn.1001-3881.2014.19.002 [6] 王博, 黄其涛.正交并联多自由度加载试验系统研究[J].机电工程, 2016, 33(11):1334-1338. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jdgc201611008&dbname=CJFD&dbcode=CJFQWANG B, HUANG Q T.Loading test system of orthogonal parallel multi degree of freedom[J].Mechanical and Electrical Engineering, 2016, 33(11):1334-1338(in Chinese). http://kns.cnki.net/KCMS/detail/detail.aspx?filename=jdgc201611008&dbname=CJFD&dbcode=CJFQ [7] STOKES I A, GARDMEMORSE M, CHURCHILL D, et al.Measurement of a spinal motion segment stiffness matrix[J].Journal of Biomechanics, 2002, 35(4):517-521. doi: 10.1016/S0021-9290(01)00221-4 [8] NIERENBERGER M, PONCELET M, PATTOFATTO S, et al.Multiaxial testing of materials using a stewart platform:Case study of the Nooru-Mohamed test[J].Experimental Techniques, 2012, 38(2):74-83. doi: 10.1111/j.1747-1567.2012.00807.x/pdf [9] FLOHICJL, PARPOIL V, BOUISSOU S, et al.A 3D displacement control by digital image correlation for the multiaxial testing of materials with a Stewart platform[J].Experimental Mechanics, 2014, 54(5):817-828. doi: 10.1007/s11340-013-9837-z [10] GUO J Z, WANG D, FAN R, et al.Development of a material testing machine with multi-dimensional loading capability[J].Journal of Advanced Mechanical Design Systems & Manufacturing, 2016, 10(2):JAMDSM0017. http://adsabs.harvard.edu/abs/2016JAMDS..10M..17G [11] GUO J Z, FAN R, WANG D, et al.Development of multidimensional loading material testing machine[J].Materials Science Forum, 2013, 770:164-169. doi: 10.4028/www.scientific.net/MSF.770 [12] 樊锐, 李茜, 王丹.6PUS并联机构的运动学整机标定[J].北京航空航天大学学报, 2016, 42(5):871-877. http://bhxb.buaa.edu.cn/CN/abstract/abstract13591.shtmlFAN R, LI X, WANG D.Integral kinematics calibration of 6PUS parallel mechanism[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(5):871-877(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13591.shtml [13] 王洪瑞, 马丽, 肖金壮.一种6-PSS并联机器人动力学模型的建立[J].中国高新技术企业, 2010(10):19-21. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=zggx201010014&dbname=CJFD&dbcode=CJFQWANG H R, MA L, XIAO J Z.A 6-PSS parallel robot dynamic model[J].China High-Tech Enterprises, 2010(10):19-21(in Chinese). http://kns.cnki.net/KCMS/detail/detail.aspx?filename=zggx201010014&dbname=CJFD&dbcode=CJFQ [14] 孙小勇, 郑彬, 鲍捷, 等.高速6-PSS并联机器人参数优化设计[J].农业机械学报, 2015, 46(5):372-378. doi: 10.6041/j.issn.1000-1298.2015.05.052SUN X Y, ZHENG B, BAO J, et al.Parameter optimization design of high speed 6-PSS parallel robot[J].Transactions of the Chinese Society of Agricultural Machinery, 2015, 46(5):372-378(in Chinese). doi: 10.6041/j.issn.1000-1298.2015.05.052 [15] WANG D, FAN R, CHEN W.Stiffness analysis of a Hexaglide parallel loading mechanism[J].Mechanism & Machine Theory, 2013, 70(6):454-473. http://www.sciencedirect.com/science/article/pii/S0094114X13001730 [16] 樊锐, 刘力军, 王丹, 等.6-PUS并联加载机构模糊PID力控制系统设计[J].航空制造技术, 2016, 513(18):34-39. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=hkgj201618007&dbname=CJFD&dbcode=CJFQFAN R, LIU L J, WANG D, et al.Design of fuzzy PID force control system based on 6-PUS parallel machine[J].Aeronautical Manufacturing Technology, 2016, 513(18):34-39(in Chinese). http://kns.cnki.net/KCMS/detail/detail.aspx?filename=hkgj201618007&dbname=CJFD&dbcode=CJFQ -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 721
- HTML全文浏览量: 109
- PDF下载量: 336
- 被引次数: 0
