



-
摘要:
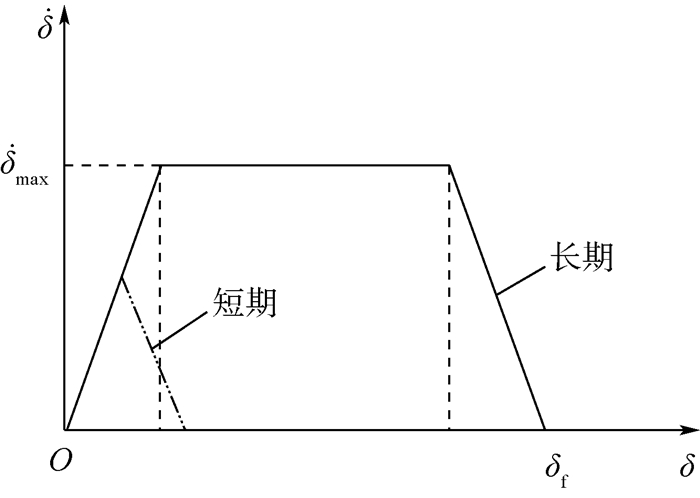
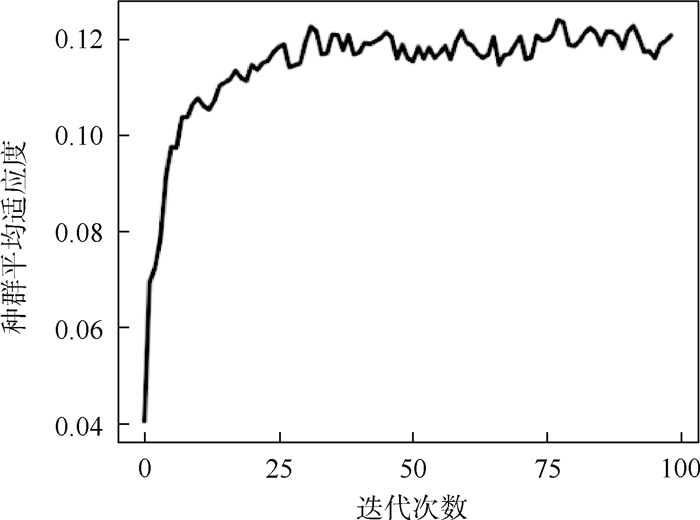
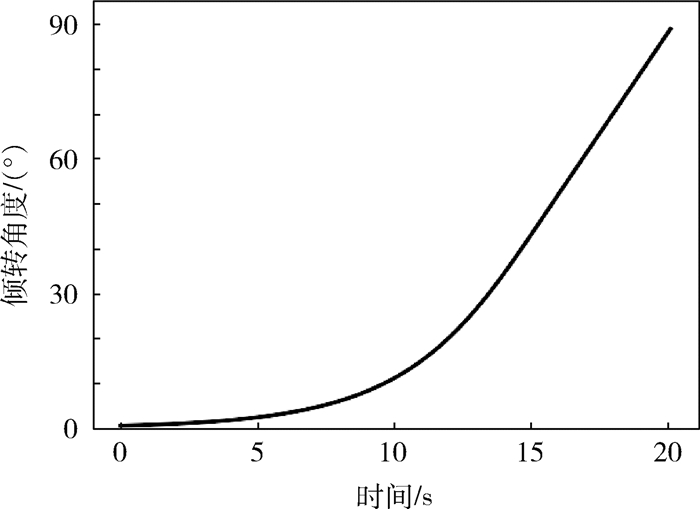
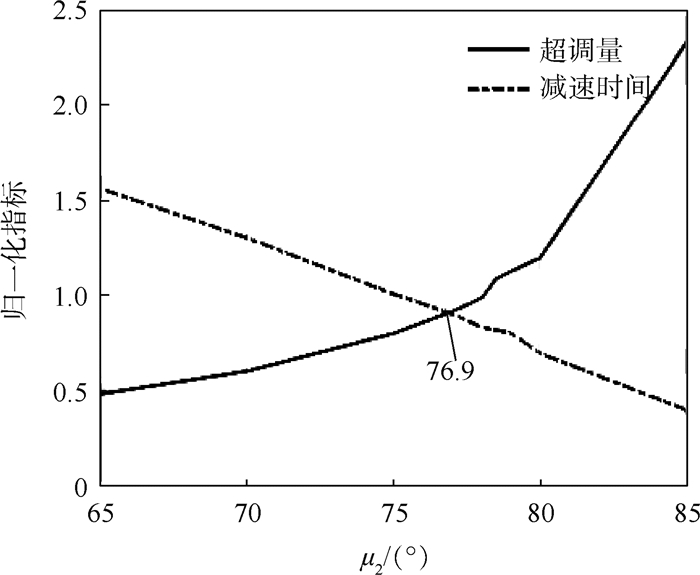
建立了典型三点式倾转旋翼无人机动力学模型,针对过渡过程,开展最优倾转角曲线研究以减小横侧控制耦合对纵向运动影响和过渡过程能耗。基于倾转角曲线对过渡过程的影响分析,提出了改进运动剖面算法对倾转角曲线进行参数化设计;并提出两阶段优化方案来对参数进行优化。第1阶段,综合考虑横侧控制耦合度最低和过渡过程能耗最小目标,以曲线参数为优化变量,构建了最优倾转角问题模型,采用遗传算法进行优化求解。第2阶段,引入舵机动力学模型,考虑过渡时间和系统超调进一步优化以减小结束阶段的超调。与2种现有典型倾转角曲线对比结果表明:给定过渡时间,设计的最优倾转角曲线有效地降低横向控制耦合程度和过渡过程的能耗,且减小结束时超调。
Abstract:A dynamic model of a typical tri-tiltrotor UAV was established. The optimal tilt angle curve in the transition process was studied to reduce the influence of lateral coupling on longitudinal motion, and energy consumption. Based on the analysis of the influence of the tilt angle curve on the transition process, a improved motion profile algorithm was proposed to parameterize the tilt angle curve. A two-phase optimization scheme was proposed to optimize parameters. In the first phase, the minimum coupling degree of lateral control and the minimum energy consumption of the transition process are considered. The optimal tilt angle problem model was constructed by using the curve parameters as the optimization variables.The optimal tilt angle problem was solved by genetic algorithm. In the second phase, a servo dynamics model was introduced for further optimization to reduce the overshoot in the end-stage considering transition time and system overshoot. The results of comparison with the three existing typical tilt angle curves show that, in given transition time, the proposed optimal tilt angle curve effectively reduces the lateral control coupling degree and the energy consumption during the transition process, and reduces the overshoot at the end of the transition.
-
表 1 飞行器参数
Table 1. Aircraft parameters
参数 数值 巡航速度/(m·s-1) 33 巡航迎角/(°) 5 尾部电机平衡倾角/(°) 10 升降舵平衡舵偏角/(°) 6 飞行器质量/kg 5 单发最大推力/N 26 升力系数 0.178 8 阻力系数 0.044 1 机翼面积/m2 0.4 俯仰发动机力臂(前、后)/m 0.4 发动机横侧力臂 0.18 气动俯仰力矩系数 0.00 086 75 平均气动弦长/m 0.16  下载: 导出CSV
下载: 导出CSV
表 2 初始约束条件
Table 2. Initial constraint condition
参数 μ1 μ2 
数值 [0°, 90°] [μ1, 90°] [0, 9](°)/s
下载: 导出CSV
表 3 遗传算法优化后参数
Table 3. Genetic algorithm optimized parameters
参数 μ1/(°) μ2/(°) 数值 45.15 90 9
下载: 导出CSV
表 4 3种倾转曲线对比结果
Table 4. Result of three tilt curves caparsion
参数 匀速倾转 未优化“S”形曲线 本文结果 耦合大小 8.94 14.36 7.10 阻力做功 4 076.7 5 218.0 2 798.9 最大超调量 4.888 6 0.039 1 0.128 3
下载: 导出CSV
-
[1] 凡永华, 杨军, 赖水清, 等.倾转旋翼机过渡段最优飞行控制系统设计[J].飞行力学, 2007, 25(1) 47-50. http://www.cnki.com.cn/Article/CJFDTotal-FHLX200701012.htmFAN Y H, YANG J, LAI S Q, et al.Design of an optinal flight control system for tiltrotor conversion[J].Flight Dynamics, 2007, 25(1):47-50(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-FHLX200701012.htm [2] 夏青元, 徐锦法, 金开保.倾转旋翼飞行器的建模和操纵分配策略[J].航空动力学报, 2013, 28(9):2016-2028. http://www.cnki.com.cn/Article/CJFDTOTAL-HKDI201309018.htmXIA Q Y, XU J F, JIN K B.Tilt-rotor aircraft modeling and its manipulation assignment strategy[J].Journal of Aerospace Power, 2013, 28(9):2016-2028(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKDI201309018.htm [3] 夏青元, 徐锦法, 张梁.倾转旋翼飞行器无模型自适应姿态控制[J].系统工程与电子技术, 2013, 35(1):146-151. http://www.cnki.com.cn/Article/CJFDTotal-XTYD201301025.htmXIA Q Y, XU J F, ZHANG L.Model-free adaptive attitude controller for a tilt-rotor aircraft[J].Systems Engineering and Electronics, 2013, 35(1):146-151(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-XTYD201301025.htm [4] 陈嘉先, 梁波.倾转旋翼无人机模态转换控制[J].战术导弹技术, 2015(2):70-76. http://www.cnki.com.cn/Article/CJFDTotal-ZSDD201502013.htmCHEN J X, LIANG B.Control of tilt rotor unmanned aerial vehicle during mode transition[J].Tactical Missile Technology, 2015(2):70-76(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-ZSDD201502013.htm [5] 严旭飞, 陈仁良.倾转旋翼机动态倾转过渡过程的操纵策略优化[J].航空学报, 2017, 38(7):54-64. http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201707005.htmYAN X F, CHEN R L.Control strategy optimization of dynamic conversion procedure of tilt-rotor aircraft[J].Acta Aeronautica et Astronautica Sinica, 2017, 38(7):54-64(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201707005.htm [6] TA D A, FANTONI I, LOZANO R.Modeling and control of a convertible mini-UAV[J].IFAC Proceedings Volumes, 2011, 44(1):1492-1497. https://www.sciencedirect.com/science/article/pii/S1474667016438206 [7] TA D A, FANTONI I, LOZANO R.Modeling and control of a tilt tri-rotor airplane[C]//American Control Conference.Piscataway, NJ: IEEE Press, 2012: 131-136. [8] 鲁麟宏, 付荣, 王勇, 等.基于矫正广义走廊的电动倾转旋翼机模态转换[J].航空学报, 2018, 39(8):121900. http://www.cnki.com.cn/Article/CJFDTotal-HKXB20180402001.htmLU L H, FU R, WANG Y, et al.Mode conversion of electric tilt rotor aircraft based on corrected generalized corridor[J].Acta Aeronautica et Astronautica Sinica, 2018, 39(8):121900(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-HKXB20180402001.htm [9] YEO Y T, LIU H H.Transition control of a tilt-rotor VTOL UAV: AIAA-2008-1848[R].Reston, VA: AIAA, 2018. [10] 赖水清, 严峰, 徐珂.倾转旋翼机过渡飞行阶段控制律设计研究[J].直升机技术, 2009(3):52-55. http://www.cnki.com.cn/Article/CJFDTotal-ZSEN200903013.htmLAI S Q, YAN F, XU K.Design and research of control law for tiltrotor in transition flight phase[J].Helicopier Technique, 2019(3):52-55(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-ZSEN200903013.htm [11] 张飞, 路平, 江涛, 等.基于模糊控制的倾转三旋翼无人机过渡模式操纵策略研究[J].电光与控制, 2018, 25(4):32-36. http://www.cnki.com.cn/Article/CJFDTotal-DGKQ201804008.htmZHANG F, LU P, JIANG T, et al.Transitional mode manipulation strategy of tilt tri-rotor UAVs based on fuzzy control[J].Electronics Optics & Control, 2018, 25(4):32-36(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-DGKQ201804008.htm [12] 曹芸芸.倾转旋翼飞行器飞行动力学数学建模方法研究[D].南京: 南京航空航天大学, 2012: 16-28.CAO Y Y.Research on mathematical modeling method for tilt rotor aircraft flight dynamics[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2012: 16-28(in Chinese). [13] 曹芸芸, 陈仁良.倾转旋翼飞行器发动机短舱倾转角度-速度包线分析[J].航空动力学报, 2011, 26(10):2174-2180. http://www.cnki.com.cn/Article/CJFDTotal-HKDI201110002.htmCAO Y Y, CHEN R L.Investigation on nacelle conversion envelope analysis method of tiltrotor aircraft[J].Journal of Aerospace Power, 2011, 26(10):2174-2180(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-HKDI201110002.htm [14] FRANCESCO G D, D'AMATO E, MATTEI M.Incremental nonlinear dynamic inversion and control allocation for a tilt rotor UAV: AIAA-2014-0963[R].Reston: AIAA, 2014. [15] 闫秋红, 垂直起降倾转四旋翼机过渡阶段控制问题研究[D].哈尔滨: 哈尔滨工业大学, 2015: 21-24.YAN Q H.Control system design on the transition stage of quad tiltrotor aircraft[D].Harbin: Harbin Institute of Technology, 2015: 21-24(in Chinese). -

 下载:
下载:







 点击查看大图
点击查看大图

计量
- 文章访问数: 723
- HTML全文浏览量: 148
- PDF下载量: 650
- 被引次数: 0
