



-
摘要:
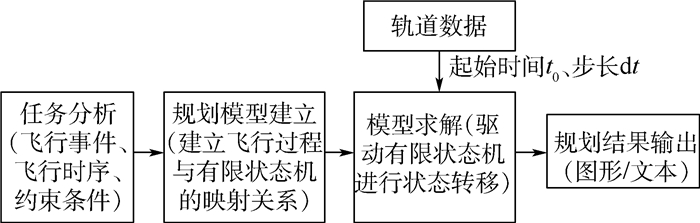
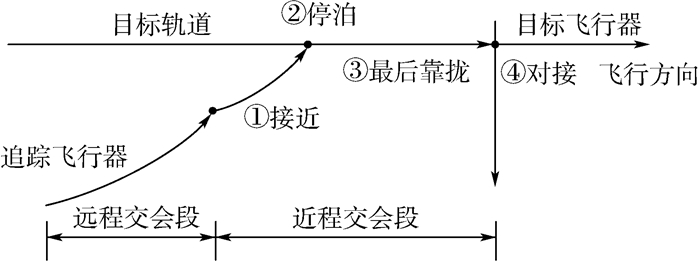
为实现多约束条件下载人航天器交会对接(RVD)飞行任务的快速、准确规划,提出了一种基于有限状态机(FSM)的飞行任务规划方法。通过飞行过程与有限状态机的映射关系建立图形化任务规划模型,以飞行事件为状态,以测控、光照等约束条件为输入信号,驱动有限状态机的状态转移,进行模型求解,实现交会对接飞行任务的自动规划。以中国神舟十号飞行任务中航天员手控交会对接试验为例,进行了规划验证。经对比,规划计算结果与任务实施结果一致,表明所提方法可以实现交会对接飞行任务的快速、准确规划。
-
关键词:
- 交会对接(RVD) /
- 任务规划 /
- 有限状态机(FSM) /
- 载人航天器 /
- 图形化建模
Abstract:The flight mission planning and scheduling method based on finite state machine (FSM) was proposed for planning and scheduling the rendezvous and docking (RVD) flight mission of manned spacecraft rapidly and exactly under multi-constraints. The graphical mission planning and scheduling model was established by mapping the RVD process with FSM. The flight events were taken as states and the constraints, such as sunlight condition, telemetry tracking and command coverage, were taken as input signals of the FSM. The model was solved automatically by driving the state machine transit from the initial state to the last one according to the flight sequence. Take the manned RVD experiment in China's Shenzhou-10 mission as an example, the proposed method was verified. The mission planning and scheduling result was consistent with the on-orbit execution. It shows that the FSM based modeling method can realize the RVD flight mission planning and scheduling rapidly and exactly.
-

图 3 基于有限状态机的交会对接飞行任务规划过程
Figure 3. RVD flight mission planning and scheduling process based on FSM

图 6 手控交会对接试验飞行任务规划结果
Figure 6. Flight mission planning and scheduling results of manned RVD experiment
表 1 交会对接与有限状态机的映射关系
Table 1. Mapping relationship between RVD and FSM
模型参数 交会对接飞行过程 S={s0,s1,…,sn} 由交会对接飞行事件组成的状态集合, 其中,s0为飞行事件1,s1为飞行事件2,…,sn为飞行事件n+1 s0∈S 初始状态s0(飞行事件1) Σ={σ0,σ1,…,σn} 由轨道日照角、阳光抑制角、测控覆盖条件等组成的输入信号集合 Λ={λ0,λ1,…,λn} 输出信号集合 T 状态转移函数集合 G 输出函数集合  下载: 导出CSV
下载: 导出CSV
表 2 手控交会对接试验飞行任务分析
Table 2. Flight mission analysis of manned RVD experiment
飞行
事件飞行时序 约束条件 起始
时间持续
时间轨道日照角 阳光抑制角 测控
覆盖停靠 t0 分离 t1 T1 β≤min{β1,β2} tc≥T1 撤离 t2 T2 β≤min {β1,β2} θ≥max{θ1,θ2,…,θn} tc≥T2 停泊 t3 T3 β≤min {β1,β2} 接近 t4 T4 β≤min {β1,β2} θ≥max{θ1,θ2,…,θn} tc≥T4 对接 t5 T5 β≤min {β1,β2} tc≥T5 停靠 t6
下载: 导出CSV
表 3 手控交会对接试验飞行任务规划结果对比
Table 3. Comparison of flight mission planning and scheduling results of manned RVD experiment
飞行事件 起始时间 本文规划结果 神舟十号在轨执行结果 撤离 08:24 08:26 接近 10:05 10:07
下载: 导出CSV
-
[1] MA X B, HUANG Z, YANG Q.Achievements and expectation of China's rendezvous and docking task[C]//Proceedings of the 64th International Astronautical Congress, 2013: 1-7. [2] XING J J, LI J, ZHU H.Optimizing in advance: Shenzhou 8 space mission scheduling tryout architecture[C]//The 5th International Conference on Computer Science & Education.Piscataway, NJ: IEEE Press, 2010: 152-155. [3] WOLE W J, SORENSEN S E.Three scheduling algorithms of the earth observing systems domain[J].Management Science, 2000, 46(1):148-168. doi: 10.1287/mnsc.46.1.148.15134 [4] GLOBUS A, CRAWFORD J, LOHN J, et al.A comparison of techniques for scheduling earth observing satellites[C]//The 16th Conference on Innovative Applications of Artificial Intelligence.Palo Alto: AAAI, 2004: 836-843. [5] 冉承新, 王慧林, 熊纲要.基于改进遗传算法的移动目标成像侦测任务规划问题研究[J].宇航学报, 2010, 31(2):458-465. http://d.old.wanfangdata.com.cn/Periodical/yhxb201002024RAN C X, WANG H L, XIONG G Y.Research on mission-planning of ocean moving targets imaging reconnaissance based on improved genetic algorithm[J].Journal of Astronautics, 2010, 31(2):458-465(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yhxb201002024 [6] 简平, 邹鹏, 熊伟.基于DPSO-SA的低轨预警系统初始任务规划方法[J].北京航空航天大学学报, 2013, 39(10):1381-1386. https://bhxb.buaa.edu.cn/CN/abstract/abstract12757.shtmlJIAN P, ZOU P, XIONG W.Original task planning method of early warning system of LEO based on DPSO-SA[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(10):1381-1386(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract12757.shtml [7] 张丽艳, 戚发轫, 李颐黎.交会对接远距离导引精度分析[J].北京航空航天大学学报, 2006, 32(6):667-670. doi: 10.3969/j.issn.1001-5965.2006.06.010ZHANG L Y, QI F R, LI Y L.Precision analysis of long distance navigation of rendezvous[J].Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(6):667-670(in Chinese). doi: 10.3969/j.issn.1001-5965.2006.06.010 [8] 朱仁璋, 林彦.航天器交会最终逼近段相对姿态估计与控制[J].北京航空航天大学学报, 2007, 33(5):544-548. doi: 10.3969/j.issn.1001-5965.2007.05.010ZHU R Z, LIN Y.Relative attitude estimation and control schemes for the final approach phase of spacecraft rendezvous[J].Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(5):544-548(in Chinese). doi: 10.3969/j.issn.1001-5965.2007.05.010 [9] WIGHERT F.Automated rendezvous and docking of spacecraft[M].Cambridge:Cambridge University Press, 2003:267-282. [10] 李革非, 陈莉丹, 唐歌实, 等.多约束交会对接发射窗口的分析和规划[J].宇航学报, 2011, 32(11):2463-2470. doi: 10.3873/j.issn.1000-1328.2011.11.024LI G F, CHEN L D, TANG G S, et al.Analysis and programming of rendezvous launch window with multi-constraints[J].Journal of Astronautics, 2011, 32(11):2463-2470(in Chinese). doi: 10.3873/j.issn.1000-1328.2011.11.024 [11] 周建平.载人航天交会对接技术[J].载人航天, 2011, 17(2):1-8. doi: 10.3969/j.issn.1674-5825.2011.02.002ZHOU J P.Rendezvous and docking technology of manned space flight[J].Manned Spaceflight, 2011, 17(2):1-8(in Chinese). doi: 10.3969/j.issn.1674-5825.2011.02.002 [12] 王蓓, 赵廷弟, 焦健.基于有限状态机的安全性仿真技术[J].北京航空航天大学学报, 2011, 37(4):428-432. https://bhxb.buaa.edu.cn/CN/abstract/abstract11937.shtmlWANG B, ZHAO T D, JIAO J.Safety simulation technology based on finite state machine[J].Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(4):428-432(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract11937.shtml [13] 王蓓, 赵廷弟.应用Stateflow技术的安全性建模与仿真[J].北京航空航天大学学报, 2011, 37(11):1415-1420. https://bhxb.buaa.edu.cn/CN/abstract/abstract12129.shtmlWANG B, ZHAO T D.Safety simulation applying Stateflow technology[J].Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(11):1415-1420(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract12129.shtml [14] ANDERSON J A.Automata theory with modern applications[M].Cambridge:Cambridge University Press, 2006:105-108. [15] 风云.神舟十号任务取得圆满成功[J].卫星应用, 2013(4):17. http://d.old.wanfangdata.com.cn/Periodical/wxyy201304006FENG Y.Shenzhou-10 mission achieve successful accomplishment[J].Satellite Application, 2013(4):17(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/wxyy201304006 -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 597
- HTML全文浏览量: 71
- PDF下载量: 345
- 被引次数: 0
