



-
摘要:
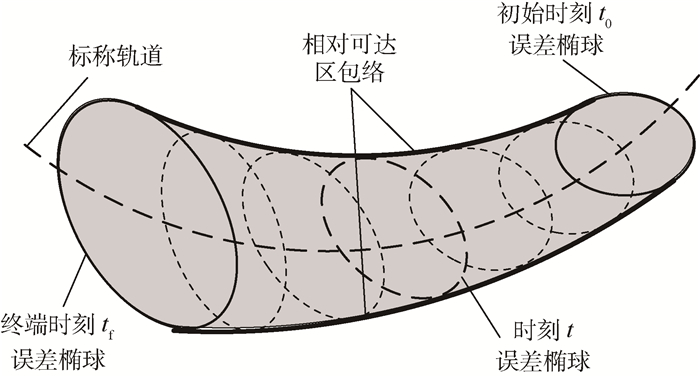
利用相对可达区(RRD)的概念对航天器在脉冲闭环控制方式下相对运动的轨迹偏差进行了分析。相对可达区是对航天器可能出现位置集合的一种几何描述。当航天器的状态误差服从高斯分布时,相对可达区可表示为随时间变化的误差椭球的集合。考虑航天器飞行过程中存在的不确定性因素,基于闭环控制系统下线性化的相对运动动力学模型,采用协方差分析描述函数法(CADET)对定义航天器误差椭球的协方差矩阵进行了分析,给出了根据协方差矩阵求解相对可达区包络的计算方法。通过将开环和闭环控制系统下的相对可达区包络与1000次的Monte Carlo仿真结果进行比较,证明了偏差分析方法的适用性与有效性。
-
关键词:
- 轨迹偏差 /
- 闭环控制 /
- 相对可达区 (RRD) /
- 误差椭球 /
- 协方差分析描述函数法 (CADET)
Abstract:The trajectory deviation analysis of relative motion in closed-loop control system was conducted with the concept of relative reachable domain (RRD), which is a geometric description for the collection of all the possible relative positions. Given that the state error of spacecraft is subjected to arbitrary Gauss distribution, the RRD could be obtained by assembling the time variable error ellipsoids of position. A closed-loop control system for close-range relative motion based on the linearized dynamical model with measurement and control errors was considered in the problem. The covariance matrix of spacecraft state, which defined the error ellipsoid, was analyzed by covariance analysis describing function technique (CADET). An algorithm for solving the envelope of RRD with the state covariance matrix was proposed subsequently. Comparison between the RRDs, solved in both open-loop and closed-loop systems, and the simulation result of 1 000 Monte Carlo runs demonstrates the feasibility and validity of the proposed method.
-

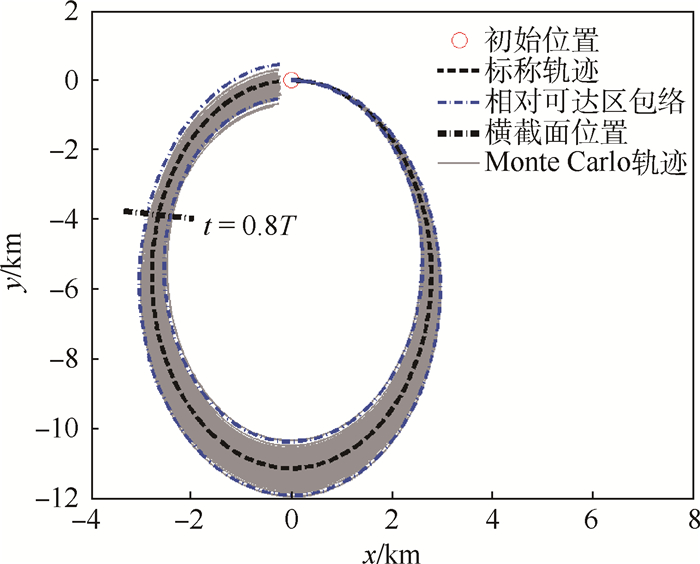
图 5 开环系统相对可达区包络与Monte Carlo轨迹的x-y平面比较
Figure 5. Comparison of RRD envelope and Monte Carlo trajectories in x-y plane for open-loop system

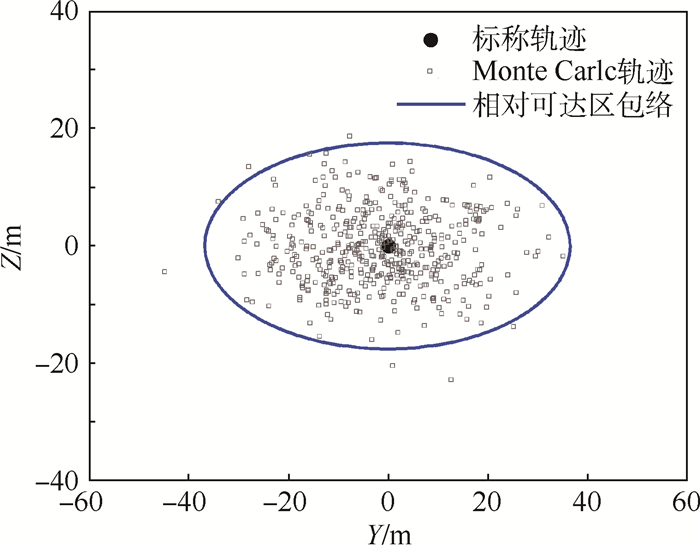
图 6 开环系统相对可达区包络与Monte Carlo轨迹的横截面比较
Figure 6. Comparison of RRD envelope and Monte Carlo trajectories in cross-section plane for open-loop system

图 8 闭环系统相对可达区包络与Monte Carlo轨迹的x-y平面比较
Figure 8. Comparison of RRD envelope and Monte Carlo trajectories in x-y plane for closed-loop system
-
[1] WEN C X, ZHAO Y S, SHI P.Precise determination of the reachable domain for a spacecraft with a single impulse[J].Journal of Guidance, Control, and Dynamics, 2014, 37(6):1767-1779. doi: 10.2514/1.G000583 [2] WEN C X, ZHAO Y S, SHI P, et al.Orbital accessibility problem for spacecraft with a single impulse[J].Journal of Guidance, Control, and Dynamics, 2014, 37(4):1260-1271. doi: 10.2514/1.62629 [3] WEN C X, ZHANG H, GURFIL P.Orbit injection considera-tions for cluster flight of nanosatellites[J].Journal of Spacecraft and Rockets, 2015, 52(1):196-208. doi: 10.2514/1.A32964 [4] WEN C X, GURFIL P.Relative reachable domain for spacecraft with initial state uncertainties[J].Journal of Guidance, Control, and Dynamics, 2015, 39(3):462-473. [5] 石昊, 赵育善, 师鹏, 等.初值不确定轨道可达区域计算[J].宇航学报, 2016, 37(4):411-419. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201604006.htmSHI H, ZHAO Y S, SHI P, et al.Determination of orbit reachable domain due to initial uncertainties[J].Journal of Astronautics, 2016, 37(4):411-419(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201604006.htm [6] GELLER D K.Linear covariance techniques for orbital rendezvous analysis and autonomous onboard mission planning[J].Journal of Guidance, Control, and Dynamics, 2006, 29(6):1404-1414. doi: 10.2514/1.19447 [7] GELLER D K, ROSE M B, WOFFINDEN D C.Event triggers in linear covariance analysis with applications to orbital rendezvous[J].Journal of Guidance, Control, and Dynamics, 2009, 32(1):102-111. doi: 10.2514/1.36834 [8] 李九人, 李海阳, 唐国金.仅测角导航的自主交会闭环控制偏差分析[J].宇航学报, 2012, 33(6):705-712. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201206005.htmLI J R, LI H Y, TANG G J.Analysis of closed-loop control covariance for autonomous orbital rendezvous using angles-only relative navigation[J].Journal of Astronautics, 2012, 33(6):705-712(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201206005.htm [9] 周洋, 闫野, 黄煦, 等.航天器轨道机动的闭环控制精度分析[J].宇航学报, 2014, 35(9):1015-1021. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201409006.htmZHOU Y, YAN Y, HUANG X, et al.Accuracy analysis of closed-loop control for spacecraft orbit maneuver[J].Journal of Astronautics, 2014, 35(9):1015-1021(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201409006.htm [10] GELB A, WARREN R S.Direct statistical analysis of nonlinear systems:CADET[J].AIAA Journal, 1973, 11(11):689-694. https://www.researchgate.net/publication/238537705_Direct_statistical_analysis_of_missile_guidance_systems_via_CADET_trade_name [11] MAHALANOBIS P C.On the generalized distance in statistics[C]//Proceddings of the National Institute of Sciences.Calcutta:[s.n.], 1936, 2:49-55. [12] BRYSON A E, HO Y C.Applied optimal control:Optimization, estimation, and control[M].Washington D.C.:Hemisphere Publishing Corporation, 1975:309-311. [13] EISENHART L P.A treatise on the differential geometry of curves and surfaces[J].Nature, 2004, 83(83):152-153. [14] CLOHESSY W H, WILTSHIRE R S.Terminal guidance system for satellite rendezvous[J].Journal of the Aerospace Sciences, 1960, 27(9):653-658. doi: 10.2514/8.8704 [15] MAYBECK P S.Stochastic models, estimation, and control[M].New York:Academic Press, 1974:206-226. [16] BAPAT R B.Linear algebra and linear models[M].3rd ed.London:Springer, 2012:23-25. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 848
- HTML全文浏览量: 43
- PDF下载量: 441
- 被引次数: 0
