



Feasibility analysis of WDPR support cone model application in hypersonic wind tunnel
-
摘要:
绳牵引并联机构(WDPR)能够有效调整飞行器模型的位姿,为扩展风洞试验能力提供了一种新型支撑手段,具有很大的应用潜力。本文将对其在高超声速风洞中应用所涉及的稳定性与气动干扰问题进行研究。以10°尖锥标椎模型为例,设计了8绳牵引的并联支撑系统,可以通过调整绳长控制模型的位置和姿态。模拟了气动载荷作用下支撑系统的稳定性,优化牵引绳直径。基于构建的三维模型,借助CFD软件进行气动计算,包括马赫数为7.8时,不同迎角下绳牵引并联支撑锥体模型的气动力系数,通过与无绳支撑结果以及文献试验数据进行比较,表明在小迎角情况下,绳系支撑引起的气动干扰相对误差较小,但会随迎角的增大而增加。此外,分别对弯刀支撑和绳牵引并联支撑进行了模态分析,对比了2种支撑的固有频率。结果显示绳系支撑固有频率较高,系统刚度较大。本文的理论研究成果可为绳牵引并联支撑技术在高超声速风洞中的应用提供一定的技术支持。
Abstract:Wire-driven parallel robot (WDPR) provides a new support method for wind tunnel tests due to its effective simulation of the aircraft model's pose, and has a great application potential. This paper gives details of an investigation of stability and aerodynamic interference referring to the application of WDPR in hypersonic wind tunnel. The parallel support system with 8 wires was constructed, and the 10° cone model was selected as the test model whose position and pose can be adjusted through the wire length. The support system's stability under the action of aerodynamic force is simulated, and the wire diameter is optimized. Based on the constructed three-dimensional model, under the condition of Mach numuber is 7.8, the aerodynamic coefficient of the model suspended with WDPR at different angles of attack is calculated in CFD. The comparison of the simulation result with the result of the same model without wires and the experimental data in reference indicates that, at small angle of attack, the relative error of the aerodynamic interference caused by the wires is small, and the interference increases with the increase of angle of attack. In addition, modal characteristics of the WDPR and the crescent shape support system are analyzed and the natural frequencies of the two support systems are compared. The comparison result shows that the natural frequency and the stiffness of the WDPR are higher than those of the crescent shape support system. The academic research work of this paper provides reference to the application of wire-driven parallel support technology in hypersonic wind tunnel.
-
Key words:
- wire-driven parallel support /
- 10° cone model /
- hypersonic /
- stability /
- aerodynamic interference
-

图 1 模型在风洞中安装示意图
1—驻室前壁;2—试验段入口;3—驻室左壁;4—驻室上壁;5—滑轮;6—相机;7—内室上壁;8—驻室后壁;9—锥体模型;10—驻室右壁;11—观察窗;12—内室右壁;13—内室下壁;14—驻室下壁;15—滚轴丝杠和电机。
Figure 1. Schematic of model installation in wind tunnel

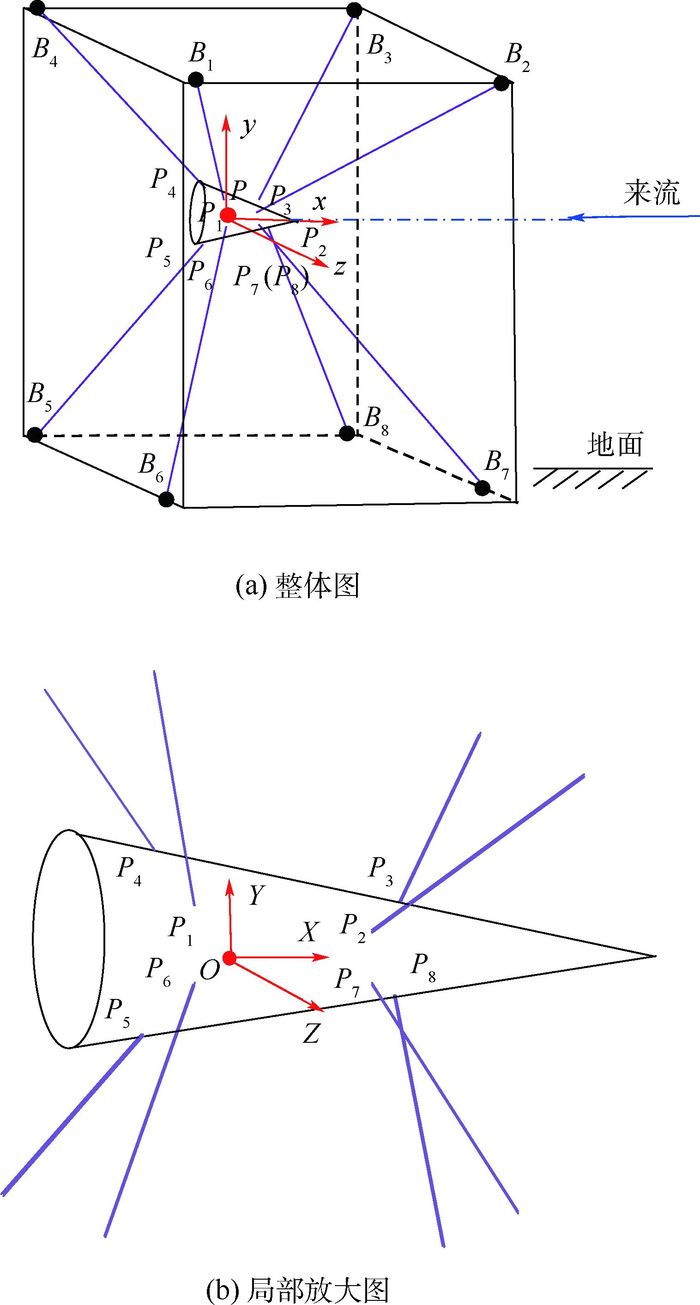
图 2 原理样机
P—模型质心;Pi—绳与模型的连接点,i=1~8;Bi—绳与固定滑轮的连接点;Pxyz—本体坐标系;OXYZ—惯性参考坐标系。
Figure 2. Principle prototype

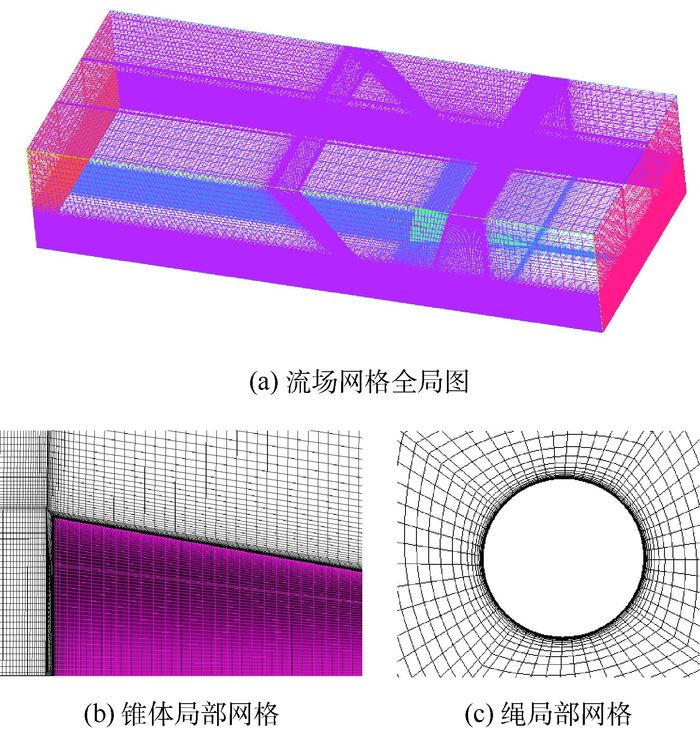
图 5 绳牵引并联支撑系统流场网格分布
Figure 5. Grid distribution of flow field with wire-driven parallel support system

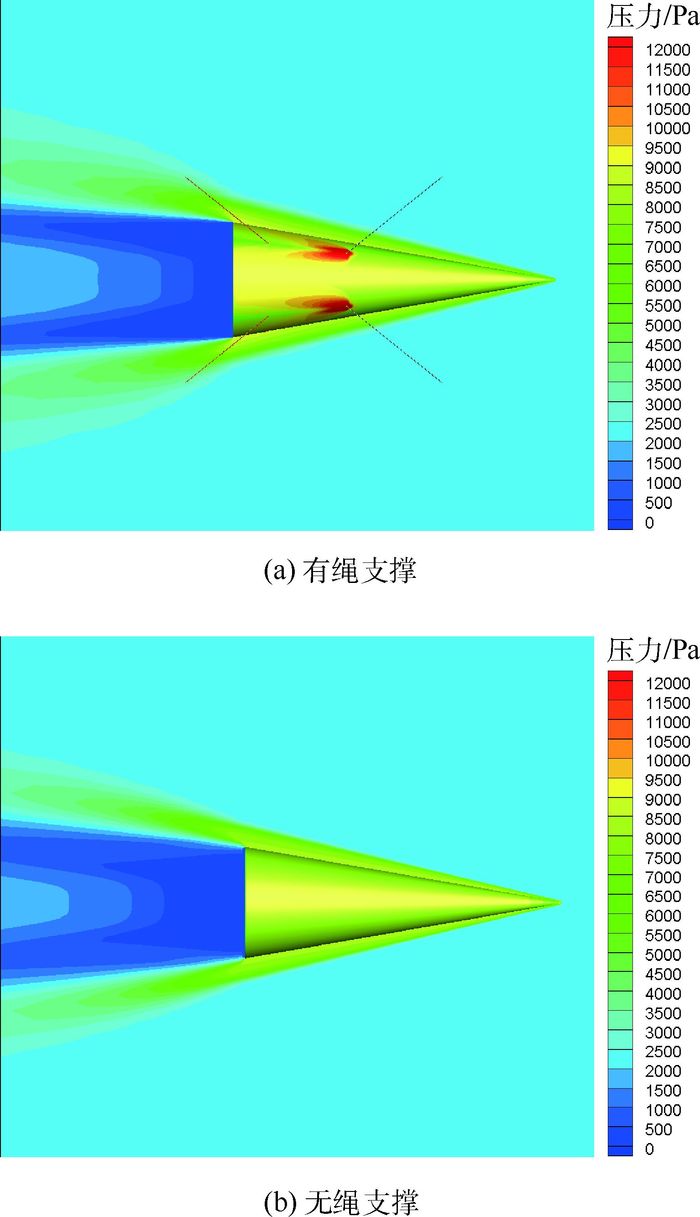
图 11 有绳支撑下迎角为2°和8°时压力分布
Figure 11. Pressure distribution with support at 2° and 8° angles of attack

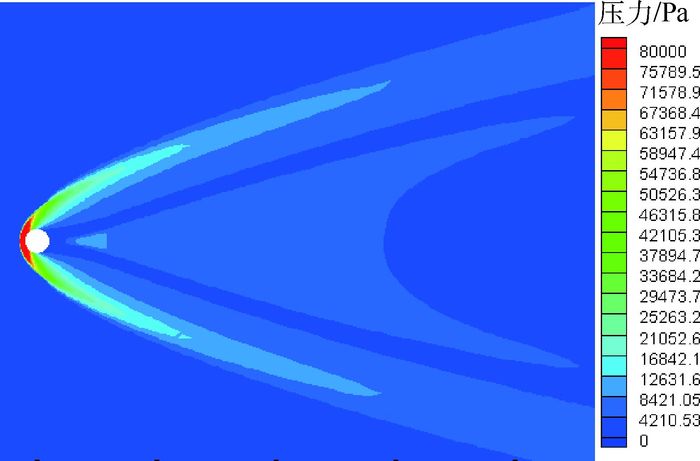
图 13 迎角为0°绳系周围压力分布
Figure 13. Pressure distribution around ropes at 0° angle of attack
表 1 绳连接点Pi和Bi的坐标
Table 1. Coordinates of wire attachment points Pi and Bi
Pi点坐标/mm Bi点坐标/mm P1=(-438.2,241.7,241.7) B1=(-1 509,1 145,1 145) P2=(400.7,194.8,112.2) B2=(1 940,955,955) P3=(400.7,194.8,-112.2) B3=(1 940,955,-955) P4=(-438.2,241.7,-241.7) B4=(-1 509,1 145,-1 145) P5=(-438.2,-2 41.7,-241.7) B5=(-1 509,-1 145,-1 145) P6=(-438.2,-241.7,241.7) B6=(-1 509,-1 145,1 145) P7=(400.7,-194.8,112.2) B7=(1 940,-955,955) P8=(400.7,-194.8,-112.2) B8=(1 940,-955,-955)  下载: 导出CSV
下载: 导出CSV
表 2 不同直径钢丝绳受力
Table 2. Force on steel wire ropes with different diameters
绳直径/mm 绳拉力最大值/kN 绳能承受的拉力极限值/kN 4 2.79 8 5 2.80 12 6 2.80 18
下载: 导出CSV
表 3 法向力系数计算结果与试验结果对比
Table 3. Comparison of normal force coefficient between calculation results and test results
迎角/(°) 法向力系数 无绳支撑 有绳支撑 试验[16] 0 0 0 0 2 0.075 7 0.073 6 0.067 5 4 0.151 6 0.146 3 0.140 6 6 0.227 5 0.220 3 0.212 9 8 0.305 4 0.295 4 0.283 8
下载: 导出CSV
表 4 绳牵引并联支撑系统模态分析
Table 4. Wire-driven parallel support system modal analysis
阶数 频率/Hz 振型 一阶 7.26 偏航 二阶 15.43 俯仰 三阶 22.14 滚转 四阶 34.93 X轴向 五阶 39.90 Z轴向 六阶 40.07 Y轴向
下载: 导出CSV
表 5 硬式支撑模态分析
Table 5. Hard support modal analysis
阶数 频率/Hz 振型 一阶 1.25 俯仰 二阶 1.49 偏航 三阶 1.78 偏航 四阶 5.59 俯仰/轴向(x) 五阶 26.34 滚转 六阶 92.92 竖向(y)
下载: 导出CSV
-
[1] CYRAN B.Sting interference effects on the static, dynamic and base pressure measurements of the standard dynamics model aircraft at Mach number 0.3 through 1.3:AEDC-TR-81-3[R].Tennessee:AEDC, 1981. [2] 章荣平, 王勋年, 李真旭, 等.低速风洞尾撑支杆干扰研究[J].实验流体力学, 2006, 20(3):33-38. http://d.wanfangdata.com.cn/Periodical/ltlxsyycl200603007ZHANG R P, WANG X N, LI Z X, et al.Investigation of sting support interference in low speed wind tunnel[J].Journal of Experiments in Fluid Mechanics, 2006, 20(3):33-38(in Chinese). http://d.wanfangdata.com.cn/Periodical/ltlxsyycl200603007 [3] SHAN G H.Wind tunnel investigation of aerodynamic and tail buffet characteristics of leading-edge extension modifications to the F/A-18:AIAA-1991-2889[R].Reston:AIAA, 1991. [4] 刘雄伟, 郑亚青, 林麒.应用于飞行器风洞试验的绳牵引并联机构技术综述[J].航空学报, 2004, 25(4):393-400. http://d.wanfangdata.com.cn/Periodical/hkxb200404016LIU X W, ZHENG Y Q, LIN Q.Overview of wire-driven parallel kinematic manipulators for aircraft wind tunnels[J].Acta Aeronautica et Sinica, 2004, 25(4):393-400(in Chinese). http://d.wanfangdata.com.cn/Periodical/hkxb200404016 [5] 卞於中, 李祥瑞, 李立, 等.低速闭口风洞模型张线支撑及内天平测量系统的研制[J].流体力学实验与测量, 1999, 13(3):85-90. http://d.wanfangdata.com.cn/Periodical/ltlxsyycl199903015BIAN Y Z, LI X R, LI L, et al.Development of model cable mount and strain gauge balance measuring system in low speed closed wind tunnel[J].Experiments and Measurements in Fluid Mechanics, 1999, 13(3):85-90(in Chinese). http://d.wanfangdata.com.cn/Periodical/ltlxsyycl199903015 [6] LAFOURCADE P, LLIBRE M, REBOULET C.Design of a parallel wire-driven manipulator for wind tunnels[C]//Proceedings of the Workshop on Fundamental Issues and Future Directions for Parallel Mechanisms and Manipulators.Berlin:Springer, 2002:187-194. [7] LAFOURCADE P.Study of parallel cable manipulators and design of an active suspension for wind tunnel[D].Malakoff Cedex:ENSAE, 2004. [8] XIAO Y W, LIN Q, ZHENG Y Q, et al.Model aerodynamic tests with a wire-driven parallel suspension system in low-speed wind tunnel[J].Chinese Journal of Aeronautics, 2010, 23(4):393-400. doi: 10.1016/S1000-9361(09)60233-8 [9] 郑亚青, 林麒, 刘雄伟, 等.用于低速风洞飞行器气动导数试验的绳牵引并联支撑系统[J].航空学报, 2009, 30(8):1549-1554. http://d.wanfangdata.com.cn/Periodical/hkxb200908029ZHENG Y Q, LIN Q, LIU X W, et al.On wire-driven parallel suspension systems for static and dynamic derivatives of aircraft in low-speed wind tunnels[J].Acta Aeronautica et Sinica, 2009, 30(8):1549-1554(in Chinese). http://d.wanfangdata.com.cn/Periodical/hkxb200908029 [10] 于卫青, 刘高计, 李通, 等.弹箭模型高速风洞张线支撑干扰试验方案研究[J].弹箭与制导学报, 2014, 34(5):144-147. http://d.wanfangdata.com.cn/Periodical/djyzdxb201405036YU W Q, LIU G J, LI T, et al.Research on the missiles hanging brace interference test in high-speed wind tunnel[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2014, 34(5):144-147(in Chinese). http://d.wanfangdata.com.cn/Periodical/djyzdxb201405036 [11] MICHAEL H, TIMOTHY W, MATTHEW M, et al.A review of basic research and development programs conducted in the LENS facilities in hypervelocity flows[C]//50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition.Reston:AIAA, 2012:1-17. [12] WANG X, PENG M, HU Z, et al.Feasibility investigation of large-scale model suspended by cable-driven parallel robot in hypersonic wind tunnel test[J].Proceedings of the Institution of Mechanical Engineers, Part G:Journal of Aerospace Engineering, 2017, 231(13):2375-2383. doi: 10.1177/0954410016662067 [13] ERICSSON L E, REDING J R.Review of support interference in dynamic tests[J].AIAA Journal, 1983, 21(12):1652-1666. doi: 10.2514/3.60166 [14] 马家驩, 潘文欣, 翟曼玲, 等.10°尖锥标模高超声速动导数的实验测量[J].空气动力学学报, 1997, 15(4):452-457.MA J H, PAN W X, ZHAI M L, et al.10° cone model free flight experiment in hypersonic impulse type wind tunnel for dynamic stability measurement[J].Acta Aerodynamica Sinica, 1997, 15(4):452-457(in Chinese). [15] MING A, HIGUCHI T.Study on multiple degree of freedom positioning mechanisms using wires (Part 1):Concept, design and control[J].International Journal of the Japan Society for Precision Engineering, 1994, 28(2):131-138. [16] WANG X G, MA S Y, LIN Q.Hybrid pose/tension control based on stiffness optimization of cable-driven parallel mechanism in wind tunnel test[C]//IEEE International Conference on Control, Automation and Robotics.Piscataway, NJ:IEEE Press, 2016:75-79. [17] 杨耀栋, 王复, 郭大华.10°尖锥模型的气动力测量[J].实验流体力学, 1988(1):60-64.YANG Y D, WANG F, GUO D H.Aerodynamic force measurement of 10° cone model[J].Journal of Experiments in Fluid Mechanics, 1988(1):60-64(in Chinese). [18] 陈万华, 王超琪, 谢国栋, 等.FL-26风洞模型支撑系统动态仿真分析[J].中国机械工程, 2012, 23(2):161-166. http://d.wanfangdata.com.cn/Periodical/zgjxgc201202009CHEN W H, WANG C Q, XIE G D, et al.Dynamic simulation analysis of model support system in FL-26 wind tunnel[J].China Mechanical Engineering, 2012, 23(2):161-166(in Chinese). http://d.wanfangdata.com.cn/Periodical/zgjxgc201202009 -

 下载:
下载:









 点击查看大图
点击查看大图

计量
- 文章访问数: 570
- HTML全文浏览量: 17
- PDF下载量: 349
- 被引次数: 0
