



-
摘要:
坐标旋转变换常用方法有四元数和欧拉角。欧拉角需3次转位,3个参数,有12种转位次序;四元数需一次转位,4个参数。欧拉角因转位次序固定,极易出现万向节锁现象。四元数虽可避免万象节锁现象,但比欧拉角多一个维度,在数据存储上要多33%的数据量,且易因浮点数舍入误差累积而导致不合法现象。为避免上述方法的缺陷,提出一种新的坐标旋转变换方式,引入偏矢轴和偏矢角等全新概念,并严格推导了基于三元角的坐标旋转变换矩阵。在描述上,该方法仅需2次转位,比欧拉角转位次数少,且避免了万象节锁现象;比四元数参数少,且更形象直观,易理解,在对复合运动的描述上更为方便。所提方法对惯性导航、旋转调制等相关领域中姿态变换的设计与分析提供了更加方便的数学手段。
Abstract:Quaternion and Euler angle are used to describe coordinate transformation. Euler angle is characterized by three-time rotation and three parameters, and there are 12 kinds of rotation order. The characteristics of the quaternion are described by one rotation and four parameters. Using Euler angle is easy to cause gimbal lock phenomenon. Although it can avoid gimbal lock phenomenon, quaternion is more than Euler angles with one dimension and 33% amount of data. It may be illegal due to the accumulation of rounding error of floating point. To avoid the defects of the above methods, a new coordinate transformation method was proposed and two new concepts of deflection-vector axis and deflection-vector angle were introduced. The coordinate rotation transformation matrix based on the ternary angle was strictly deduced. Compared with the Euler rotation transformation, this method needs less rotation and avoids gimbal lock phenomenon; compared with the quaternion, it needs less parameters and is easy to understand. This method is more convenient for the description of the compound rotation. The proposed method provides more convenient mathematical means for the design and analysis of attitude transformation in related fields, such as inertial navigation and rotation modulation.
-
Key words:
- quaternion /
- Euler angle /
- ternary angle /
- coordinate transformation /
- deflection-vector axis /
- deflection-vector angle
-

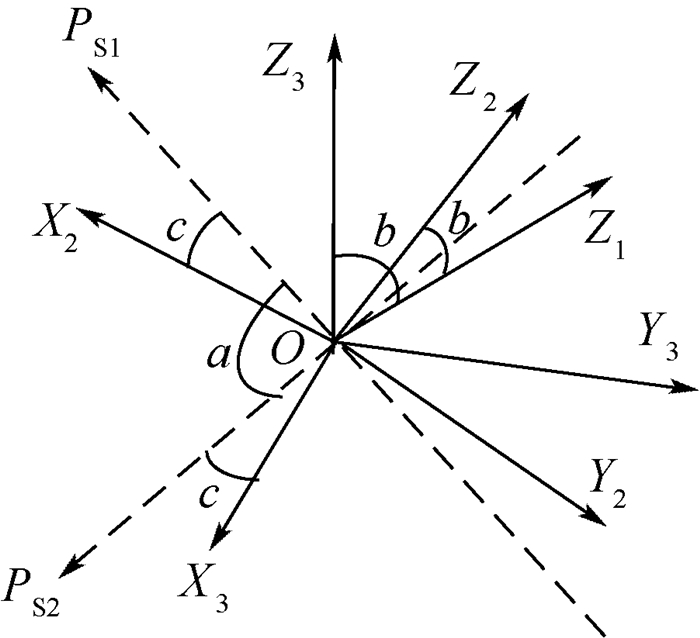
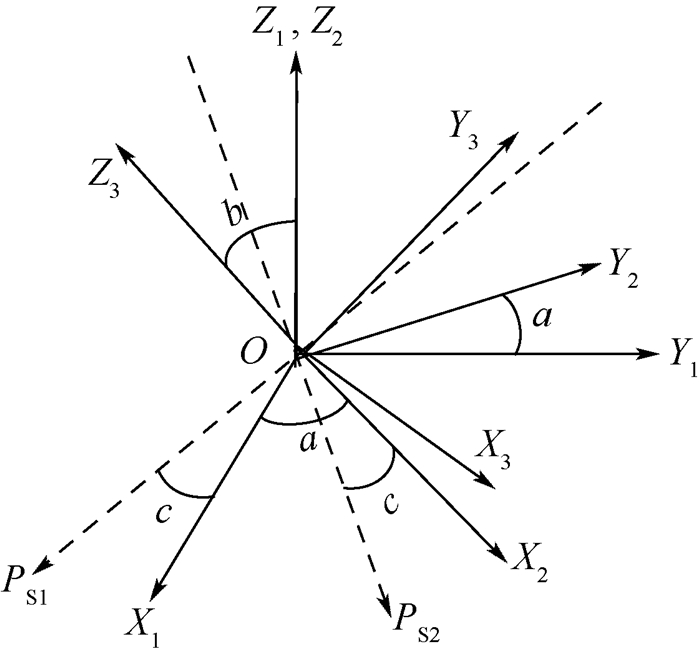
图 1 三元角坐标变换方式示意图
Figure 1. Schematic diagram of ternary angle coordinate transformation

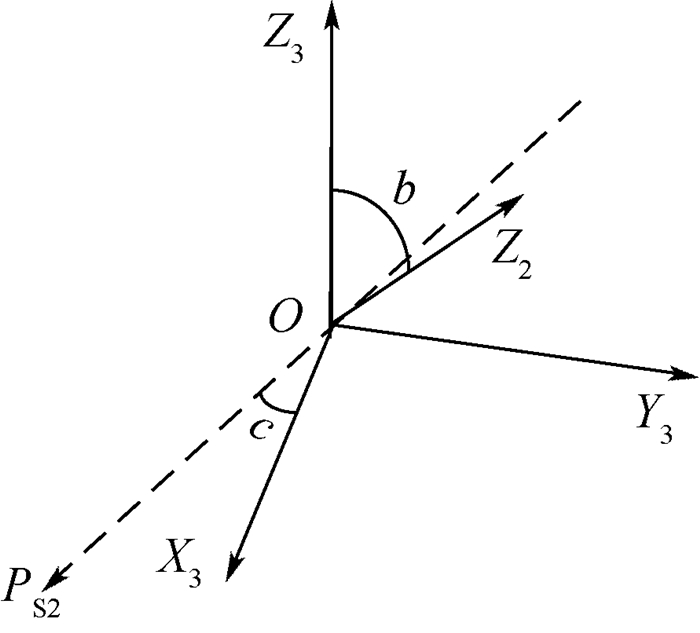
图 2 末系到初系先偏转过程简图
Figure 2. Process diagram of deflection first from last coordinate system to initial coordinate system

图 3 末系到初系先旋后偏过程图
Figure 3. Process diagram of rotation first deflection second from last coordinate system to initial coordinate system

图 4 末系到初系先旋转过程图
Figure 4. Process diagram of rotation first from last coordinate system to initial coordinate system

图 5 末系到初系后偏转过程图
Figure 5. Process diagram of post deflection from last coordinate system to initial coordinate system

图 6 坐标系的三维变换效果图
Figure 6. Three-dimensional effect graphs of coordinate transformation

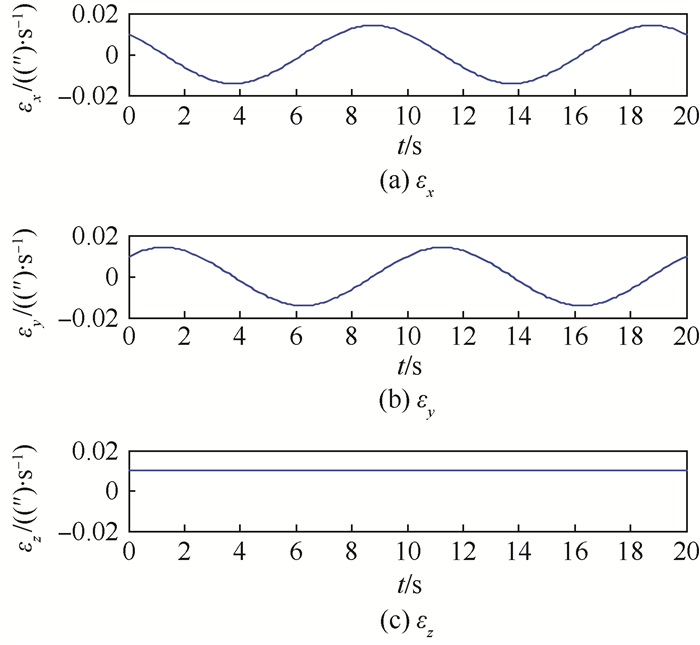
图 7 常值漂移单轴旋转调制效果分析
Figure 7. Analysis on effect of single-axis rotation modulation with constant drift

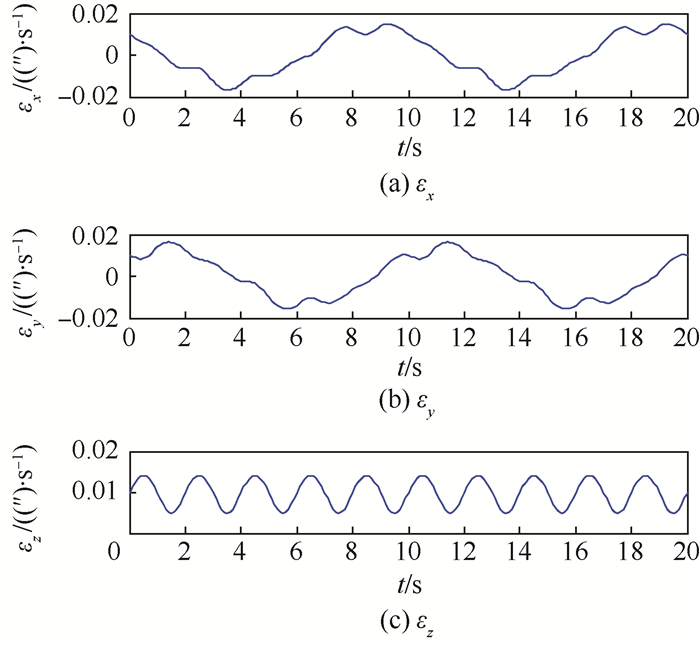
图 8 常值漂移复合旋转调制效果分析
Figure 8. Analysis on effect of compound rotation modulation with constant drift
表 1 航向角真值
Table 1. Truth value of course angle
T22 T21 ψ →0 + 90° →0 - -90° + + ψt + - ψt - + ψt+180° - - ψt-180°  下载: 导出CSV
下载: 导出CSV
-
[1] DIEBEL J.Representing attitude:Euler angles, unit quaternions, and rotation vectors[J].Matrix, 2006, 58(15-16):1-35. http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.110.5134 [2] 余杨, 张洪钺.圆锥运动及其影响的3种描述方法[J].北京航空航天大学学报, 2008, 34(8):956-960. http://bhxb.buaa.edu.cn/CN/abstract/abstract9392.shtmlYU Y, ZHANG H Y.Three description of coning motion and its influence[J].Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(8):956-960(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract9392.shtml [3] 尹剑, 陈红, 杨萌, 等.捷联姿态计算中方向余弦与四元数法分析比较[J].四川兵工学报, 2015, 36(9):106-110. http://www.doc88.com/p-7028973707257.htmlYIN J, CHEN H, YANG M, et al.Analysis and comparison of direction cosine matrix and quaternion methods for strapdown inertial navigation attitude algorithm[J].Journal of Sichuan Ordnance, 2015, 36(9):106-110(in Chinese). http://www.doc88.com/p-7028973707257.html [4] HUANG Z, LI Y W, GAO F.The expression of the orientation of a spatial moving unit by Euler angle[J].Journal of Yanshan University, 2002, 26(3):189-192. http://en.cnki.com.cn/Article_en/CJFDTOTAL-DBZX200203000.htm [5] 李跃军, 阎超.飞行器姿态角解算的全角度双欧法[J].北京航空航天大学学报, 2007, 33(5):505-508. http://bhxb.buaa.edu.cn/CN/abstract/abstract9525.shtmlLI Y J, YAN C.Improvement of dual-Euler method for full scale Eulerian angles solution of aircraft[J].Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(5):505-508(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract9525.shtml [6] 刘俊峰.三维转动的四元数表述[J].大学物理, 2004, 23(4):39-43. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=dxwl200404014&dbname=CJFD&dbcode=CJFQLIU J F.Three dimensional rotation represented by quaternion[J].College Physics, 2004, 23(4):39-43(in Chinese). http://kns.cnki.net/KCMS/detail/detail.aspx?filename=dxwl200404014&dbname=CJFD&dbcode=CJFQ [7] 邢燕. 四元数及其在图形图像处理中的应用研究[D]. 合肥: 合肥工业大学, 2009: 1-8. http://cdmd.cnki.com.cn/article/cdmd-10359-2010036953.htmXING Y.Research on quaternion and its applications in graphics and image processing[D].Hefei:Hefei University of Technology, 2009:1-8(in Chinese). http://cdmd.cnki.com.cn/article/cdmd-10359-2010036953.htm [8] 封文春, 林贵平.四元数在弹射座椅性能仿真中的应用[J].北京航空航天大学学报, 2006, 32(8):881-884. http://bhxb.buaa.edu.cn/CN/abstract/abstract9751.shtmlFENG W C, LIN G P.Application of quaternion in ejection seat performance simulation[J].Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(8):881-884(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract9751.shtml [9] ZHANG R H, JIA H G, CHEN T, et al.Attitude solution for strapdown inertial navigation system based on quaternion algorithm[J].Optics and Precision Engineering, 2008, 16(10):1963-1970. http://en.cnki.com.cn/Article_en/CJFDTOTAL-GXJM200810031.htm [10] 袁赣南, 张涛.四元数UKF超紧密组合导航滤波方法[J].北京航空航天大学学报, 2010, 36(7):762-766. http://bhxb.buaa.edu.cn/CN/abstract/abstract8434.shtmlYUAN G N, ZHANG T.Quaternion unscented Kalman filtering for ultra-tight integration[J].Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(7):762-766(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract8434.shtml [11] XIA X, JING W, LI C, et al.Time-shared scheme design for attitude control system during space separation[J].Aerospace Science and Technology, 2011, 15(2):108-116. doi: 10.1016/j.ast.2010.06.005 [12] VASS G.Avoiding gimbal lock[J].Computer Graphics World, 2009, 32(6):10-11. http://connection.ebscohost.com/c/articles/42208299/avoiding-gimbal-lock [13] 赵庆涛, 邢建平, 王康, 等.基于体感识别的人形机器人姿态控制策略研究[J].互联网天地, 2016, 13(5):14-24. http://www.cqvip.com/QK/87184X/201605/668984832.htmlZHAO Q T, XING J P, WANG K, et al.Research on humanoid robot posture control strategy based on somatosensory recognition[J].China Internet, 2016, 13(5):14-24(in Chinese). http://www.cqvip.com/QK/87184X/201605/668984832.html [14] 刘建洲.四元数体上的矩阵及其优化理论[J].数学学报, 1992, 35(6):831-838. http://www.cqvip.com/QK/94850X/199206/877142.htmlLIU J Z.Matrix and its optimization theory on quaternion[J].Acta Mathematica Sinica, 1992, 35(6):831-838(in Chinese). http://www.cqvip.com/QK/94850X/199206/877142.html [15] SCHMIDT J, NIEMANN H.Using quaternions for parametrizing 3-d rotations in unconstrained nonlinear optimization[C]//Proceedings of the Vision Modeling and Visualization Conference, VMV.[S.l.]:Aka Gmbh, 2001:399-406. [16] 徐烨烽, 吕妍红, 仇海涛.基于MEMS器件的旋转调制式航姿参考系统设计[J].北京航空航天大学学报, 2010, 36(11):1343-1347. http://bhxb.buaa.edu.cn/CN/abstract/abstract11815.shtmlXU Y F, LV Y H, QIU H T.Design of rotation modulation on AHRS based on MEMS sensor[J].Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(11):1343-1347(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract11815.shtml [17] 赵晓伟, 李江, 党宁, 等.基于单轴连续旋转调制的方位对准技术[J].导弹与航天运载技术, 2016(1):26-30. http://kns.cnki.net/KCMS/detail/detail.aspx?filename=ddyh201601010&dbname=CJFD&dbcode=CJFQZHAO X W, LI J, DANG N, et al.Research on azimuth alignment technology based on the single axis continuous rotation modulation[J].Missiles and Space Vehicles, 2016(1):26-30(in Chinese). http://kns.cnki.net/KCMS/detail/detail.aspx?filename=ddyh201601010&dbname=CJFD&dbcode=CJFQ [18] 蔡山波. 双轴旋转捷联惯导系统旋转控制算法研究[D]. 北京: 北京理工大学, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10007-1016717719.htmCAI S B.Control algorithm of dual-axis rotation SINS framework[D].Beijing:Beijing Institute of Technology, 2016(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10007-1016717719.htm -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 926
- HTML全文浏览量: 108
- PDF下载量: 482
- 被引次数: 0
