



-
摘要:
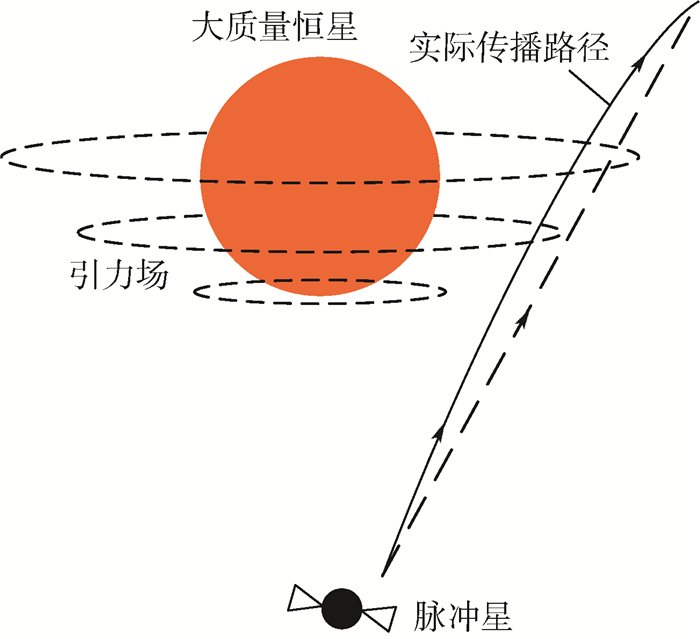
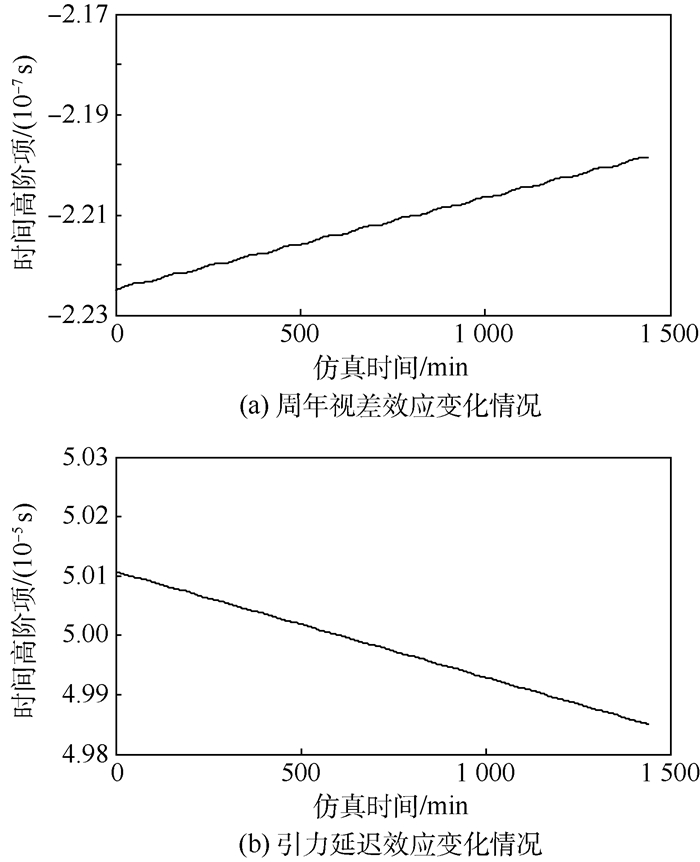
针对X射线脉冲星导航中,传统的扩展卡尔曼滤波(EKF)算法因为线性化需要从而忽略观测模型高阶项导致较大截断误差的问题,提出一种适用于脉冲星导航的改进线性观测方程。首先,详细分析了观测方程简化过程中会造成截断误差的周年视差效应及引力延迟效应的物理意义,介绍了2个高阶项的数学模型,并对2项进行了详细的数值分析。其次,利用泰勒展开等方式,将2个高阶项进行线性化处理,建立一种改进的线性观测方程。最后,利用地球卫星轨道数据,将2个线性观测方程分别应用到脉冲星导航的EKF解算中验证改进线性观测方程的有效性。结果表明,在考虑高阶项影响的条件下,改进的线性观测方程均能保证250 m和2 m/s以内的位置和速度估计误差而且对高阶项变化表现出一定的鲁棒性,但传统的简化线性观测方程却会导致发散。
Abstract:Considering that the traditional extended Kalman filter (EKF) algorithm has to neglect the higher order terms of the measurement model because of linearization, which causes the problem of large truncation errors in X-ray pulsar navigation, an improved linear measurement equation suitable for pulsar navigation is proposed. First, the paper analyzes the physical meaning of annual parallax effect and Shapiro effect which cause the truncation error in the process of simplifying the measurement equation. The two higher order terms' mathematical models are established and numerical analysis is conducted. Then, using the method of Taylor expansion, the two higher order terms are linearized to establish an improved linear measurement equation. Finally, using the earth satellite orbit data, the two measurement equations are respectively applied to the EKF algorithm of the pulsar navigation to verify the validity of the improved measurement equation. The results show that the improved linear measurement equation can guarantee the position and velocity estimation error within 250 m and 2 m/s under the consideration of the higher order terms, and that the improved linear measurement equation has some robustness to the higher order term changes. However, the traditional simplified measurement equation can cause divergence.
-
Key words:
- pulsar navigation /
- truncation error /
- annual parallax effect /
- Shapiro effect /
- linearization
-

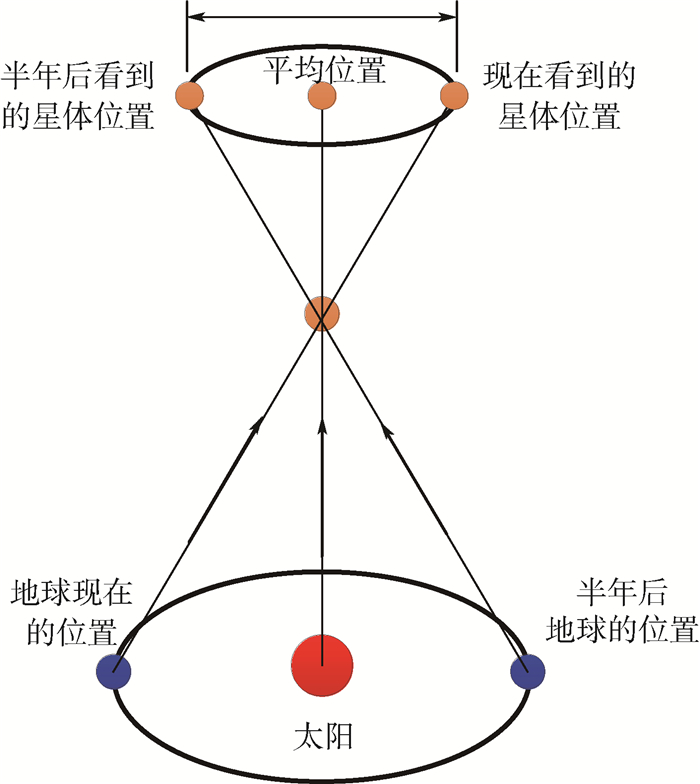
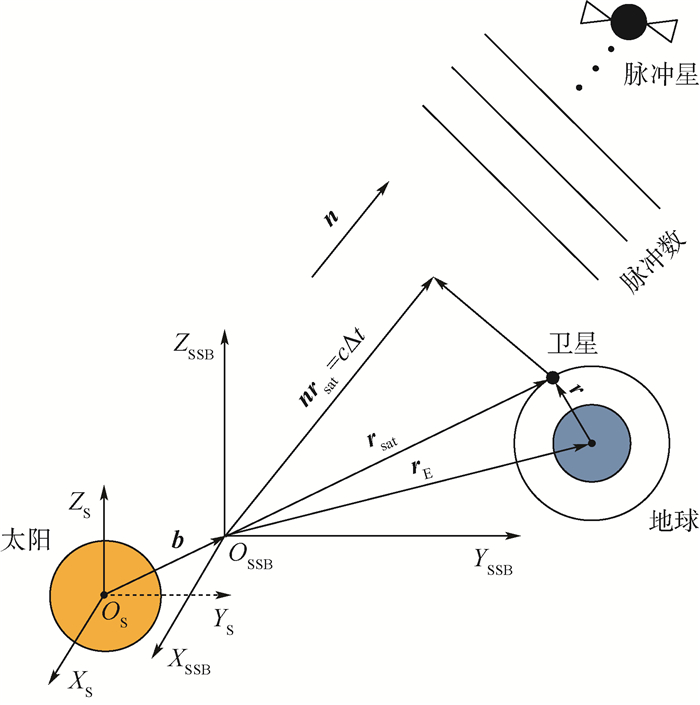
图 1 脉冲星导航基本原理
OS-XSYSZS—太阳质心坐标系; OSSB-XSSBYSSBZSSB—太阳系质心坐标系; b—太阳质心到SSB的矢量; rE—地球在太阳系质心坐标系中的位置。
Figure 1. Basic principle of pulsar navigation

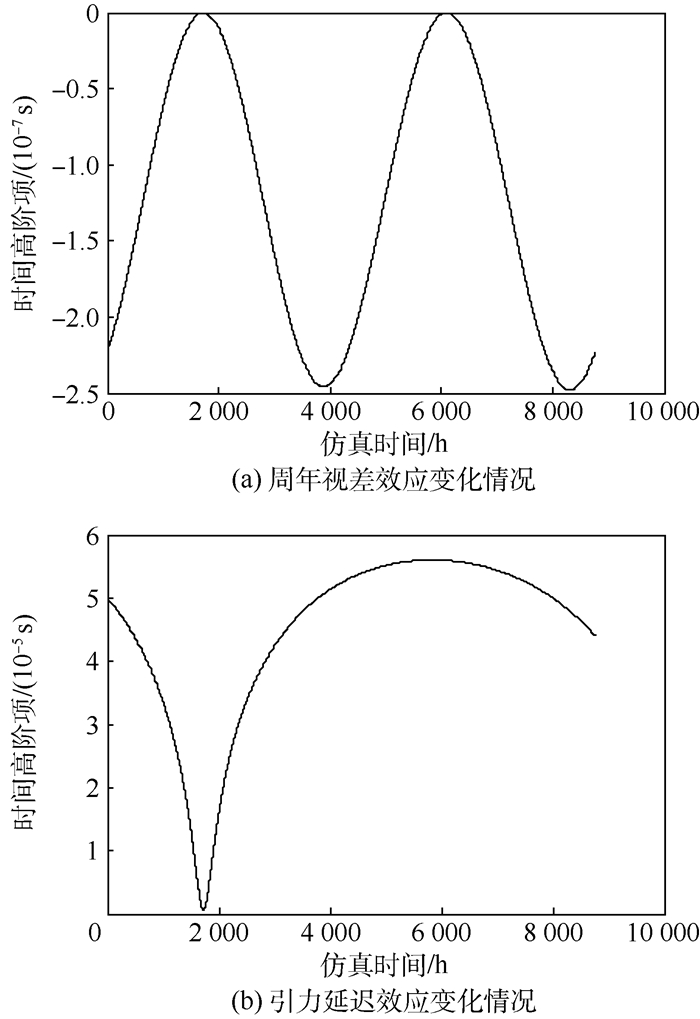
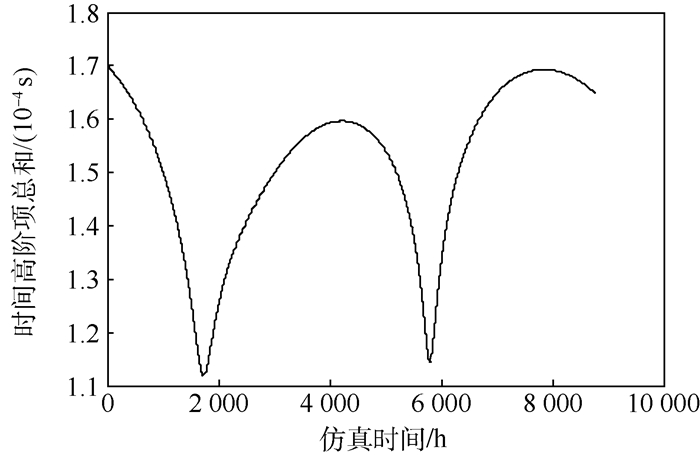
图 6 全年3颗脉冲星高阶项总和变化
Figure 6. Whole year variation of summation of three pulsars' higher order terms

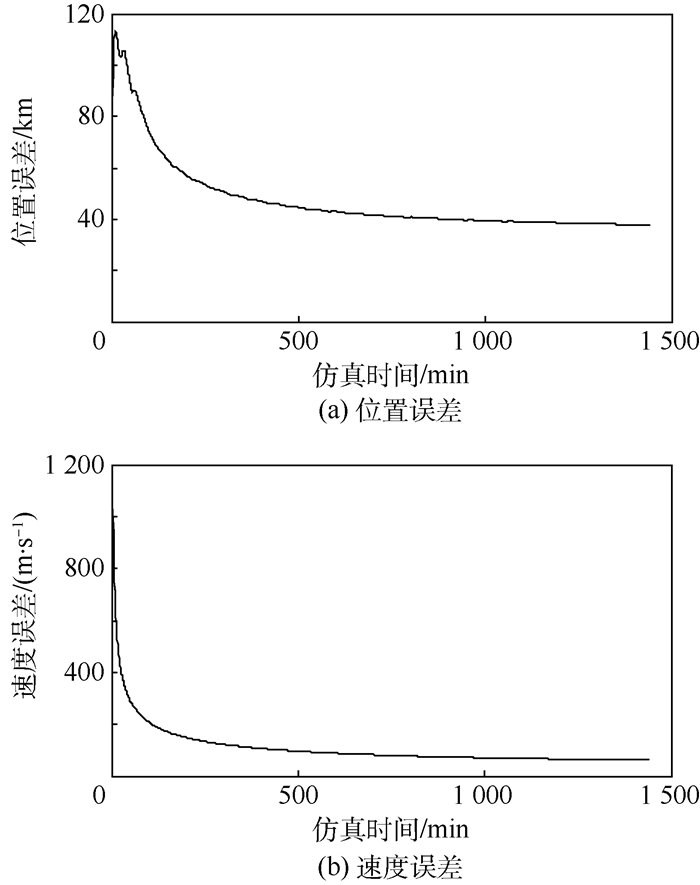
图 7 2015年10月17日简化线性观测方程估计结果
Figure 7. Estimation results of simplified linear measurement equation on October 17, 2015

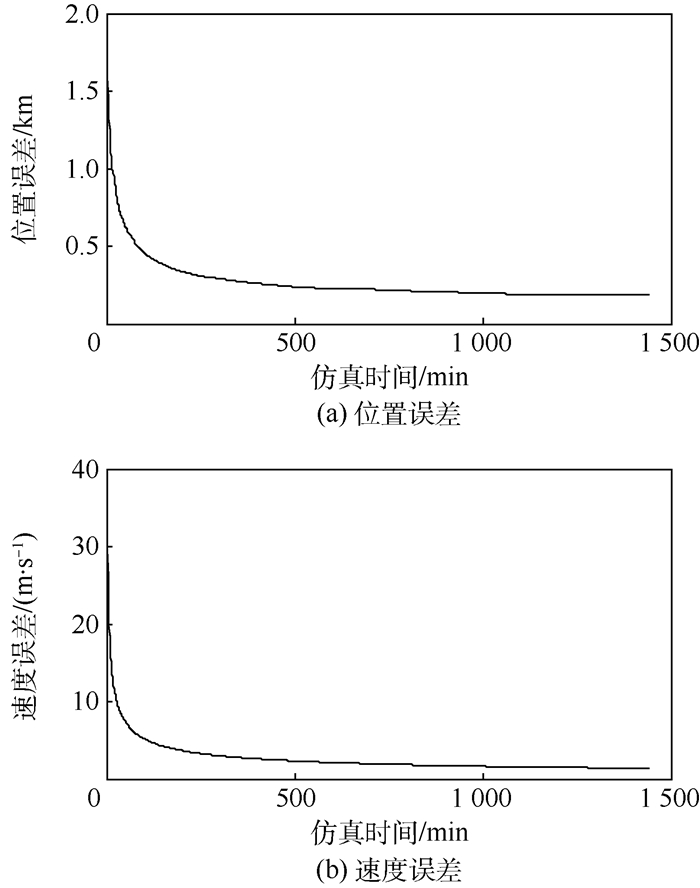
图 8 2015年10月17日改进线性观测方程估计结果
Figure 8. Estimation results of improved linear measurement equation on October 17, 2015

图 9 2015年12月29日简化线性观测方程估计结果
Figure 9. Estimation results of simplified linear measurement equation on December 29, 2015

图 10 2015年12月29日改进线性观测方程估计结果
Figure 10. Estimation results of improved linear measurement equation on December 29, 2015
表 1 轨道参数
Table 1. Parameters of orbit
参数 数值 半长轴/km 7350 离心率 0 轨道倾角/(°) 45 升交点赤经/(°) 0 近地点幅角/(°) 30 初始真近点/(°) 0 起始时刻 2015-10-17 T04:00:00 结束时刻 2016-10-16 T04:00:00  下载: 导出CSV
下载: 导出CSV
脉冲星 周期/s 赤经/(°) 赤纬/(°) 距离/kpc 精度/m B1821-24 0.003045 276.133 -24.869 4.9 325 注:1 kpc=3.08×1019m。
下载: 导出CSV
脉冲星 周期/s 赤经/(°) 赤纬/(°) 距离/kpc 精度/m B0531+21 0.033 084 83.633 22.014 2.0 109 B1821-24 0.003 045 276.133 -24.869 4.9 325 B1937+21 0.001 557 294.910 21.583 3.6 344
下载: 导出CSV
表 4 2种观测方程的估计误差
Table 4. Estimate errors of two measurement equations
日期 简化观测方程 改进观测方程 位置误差/km 速度误差/(m·s-1) 位置误差/km 速度误差/(m·s-1) 2015-10-17
(最大值点)51.631 1 120.003 9 0.244 5 1.871 5 2015-12-29
(最小值点)40.132 7 74.361 0 0.241 9 1.909 7
下载: 导出CSV
-
[1] PINES D J.ARPA/DARPA space programs[M].Arlington:XNAV Industry Day, 2004:1-5. [2] 帅平, 张新源, 黄良伟, 等.脉冲星导航试验卫星科学观测数据分析[J].空间控制技术与应用, 2017, 43(2):1-6. doi: 10.3969/j.issn.1674-1579.2017.02.001SHUAI P, ZHANG X Y, HUANG L W, et al.X-ray pulsar navigation test satellite science data analysis[J].Aerospace Control and Application, 2017, 43(2):1-6(in Chinese). doi: 10.3969/j.issn.1674-1579.2017.02.001 [3] 帅平, 陈绍龙, 吴一凡, 等.X射线脉冲星导航原理[J].宇航学报, 2007, 28(6):1538-1543. doi: 10.3321/j.issn:1000-1328.2007.06.020SHUAI P, CHEN S L, WU Y F, et al.Navigation principles using X-ray pulsars[J].Journal of Astronautics, 2007, 28(6):1538-1543(in Chinese). doi: 10.3321/j.issn:1000-1328.2007.06.020 [4] 毛悦, 宋小勇.脉冲星时间模型精化及延迟修正分析[J].武汉大学学报(信息科学版), 2009, 34(5):581-584. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=SciencePaper201303040000298007MAO Y, SONG X Y.Accurating and delay correction analysis of pulsar timing model[J].Geomatics and Information Science of Wuhan University, 2009, 34(5):581-584(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=SciencePaper201303040000298007 [5] 刘劲.基于X射线脉冲星的航天器自主导航方法研究[D].武汉: 华中科技大学, 2008: 55-56.LIU J.X-ray pulsar-based spacecraft autonomous navigation[D].Wuhan: Huazhong University of Science and Technology, 2008: 55-56(in Chinese). [6] 乔黎.X射线脉冲星高轨道卫星自主导航及其应用技术研究[D].南京: 南京航空航天大学, 2010: 23-27.QIAO L.X-ray pulsar-based autonomous navigation and its application to high earth orbits satellites[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2010: 23-27(in Chinese). [7] 王敏.基于X射线脉冲星的航天器自主导航滤波算法研究[D].哈尔滨: 哈尔滨工业大学, 2015: 14-18.WANG M.The research of spacecraft autonomous navigation algorithm based on the X-ray pulsars[D].Harbin: Harbin Institute of Technology, 2015: 14-18(in Chinese). [8] CHEN P T, SPEYER J L, BAYARD D S, et al.Autonomous navigation using X-ray pulsars and multirate processing[J].Journal of Guidance, Control, and Dynamics, 2017, 40(9):2237-2249. doi: 10.2514/1.G002705 [9] NING X L, GUI M Z, ZHANG J, et al.Impact of the pulsar's direction on CNS/XNAV integrated navigation[J].Transactions on Aerospace and Electronic Systems, 2017, 53(6):3043-3055. doi: 10.1109/TAES.2017.2725518 [10] 宁晓琳, 马辛, 张学亮, 等.基于ASUKF的火星探测器脉冲星自主导航方法[J].北京航空航天大学学报, 2012, 38(1):22-27. http://bhxb.buaa.edu.cn/CN/abstract/abstract12169.shtmlNING X L, MA X, ZHANG X L, et al.Autonomous pulsars navigation method based on ASUKF for Mars probe[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(1):22-27(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12169.shtml [11] 费保俊, 孙维瑾, 潘高田, 等.X射线脉冲星自主导航的光子到达时间转换[J].空间科学学报, 2010, 30(1):85-90. http://d.old.wanfangdata.com.cn/Periodical/kjkxxb201001014FEI B J, SUN W J, PAN G T, et al.Transformation of photon time of arrival in XNAV[J].Chinese Journal of Space Science, 2010, 30(1):85-90(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/kjkxxb201001014 [12] 孙海峰.X射线脉冲星导航信号特性分析及具有多物理特性的仿真系统研究[D].西安: 西安电子科技大学, 2015: 25-28SUN H F.Study on signal characteristics of X-ray pulsar based navigation and simulation experiment system with multi-physical features[D].Xi'an: Xidian University, 2015: 25-28(in Chinese). [13] 李小平, 方海燕, 孙海峰, 等.X射线脉冲星大尺度时间转换模型研究[J].载人航天, 2015, 21(6):628-634. doi: 10.3969/j.issn.1674-5825.2015.06.016LI X P, FANG H Y, SUN H F, et al.Research on large-scale time transform model of X-ray pulsar[J].Manned Spaceflight, 2015, 21(6):628-634(in Chinese). doi: 10.3969/j.issn.1674-5825.2015.06.016 [14] SHEIKH S I, HELLINGS R W, MATZNER R A.High-order pulsar timing for navigation[C]//Proceeding of the 63rd Annual Meeting of the Institute of Navigation.Cambridge: Institute of Navigation, 2007: 432-443. [15] 杨廷高.关于脉冲星脉冲到达时间转换方程[J].时间频率学报, 2009, 32(2):154-159. doi: 10.3969/j.issn.1674-0637.2009.02.012YANG T G.On transfer equation of pulsar pulse arrival time[J].Journal of Time and Frequency, 2009, 32(2):154-159(in Chinese). doi: 10.3969/j.issn.1674-0637.2009.02.012 [16] 李志豪.基于X射线脉冲星的航天器导航滤波算法仿真分析[D].长沙: 国防科学技术大学, 2008: 52.LI Z H.Simulation and analysis of the filters for spacecraft navigation based on X-ray pulsars[D].Changsha: National University of Defense Technology, 2008: 52(in Chinese). [17] 李晓宇, 姜宇, 金晶, 等.脉冲星导航系统的星历表误差RKF校正算法[J].宇航学报, 2017, 38(1):26-33. doi: 10.3873/j.issn.1000-1328.2017.01.004LI X Y, JIANG Y, JIN J, et al.RKF method for pulsar based navigation with emphasis error correction[J].Journal of Astronautics, 2017, 38(1):26-33(in Chinese). doi: 10.3873/j.issn.1000-1328.2017.01.004 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 657
- HTML全文浏览量: 114
- PDF下载量: 359
- 被引次数: 0
