



-
摘要:
基于三维激光扫描系统的移动机器人动态环境地图构建技术是机器人智能感知技术的重要组成部分,而三维激光扫描系统的设计及标定技术对于地图构建的精度有决定性的影响。针对应用于小型移动机器人的三维激光扫描系统低成本、小型化的需求,设计了一套由高精度旋转云台和小型二维激光测距传感器组成的三维激光扫描系统,并提出了一种新的系统参数标定方法以提高三维扫描测量的准确度。该方法使用镂空圆孔标定板作为标定对象以完成对三维扫描特征自动准确获取,并根据非线性最小二乘法对三维激光扫描系统的参数进行优化计算。实验结果表明,所设计的三维激光扫描系统能够准确地测量周围环境的三维信息,实现了以低成本获得高质量环境建模的三维扫描数据技术。
Abstract:Dynamic environment map construction technology based on 3D laser scanning system has been served as one of the important intelligent perception technologies for mobile robots. The design and calibration of 3D laser scanning system place a decisive influence on the accuracy of the constructed environment model.For implementation on low cost and miniaturization of 3D laser scanning system for small mobile robots, a 3D laser scanning system composed of high precision rotating cloud platform and small 2D laser ranging sensor is designed, and a new system parameter calibration method is proposed to improve the accuracy of 3D scanning measurement. A hollow circular hole calibration plate was used as the calibration object to capture the 3D scanning features automatically and accurately. The parameters of the 3D laser scanning system were then optimized with a nonlinear least square algorithm. The experimental results demonstrate that the designed 3D laser scanning system can accurately capture the 3D information of the surrounding environment, which realizes the 3D scanning data technique for high-quality environment modeling with a relatively low cost.
-

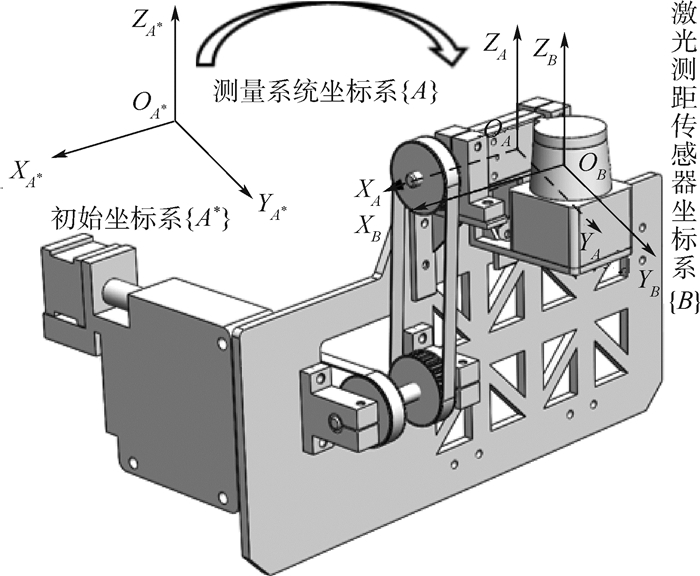
图 1 三维激光扫描系统机构设计原理图
Figure 1. Schematic diagram of 3D laser scanning system mechanism design
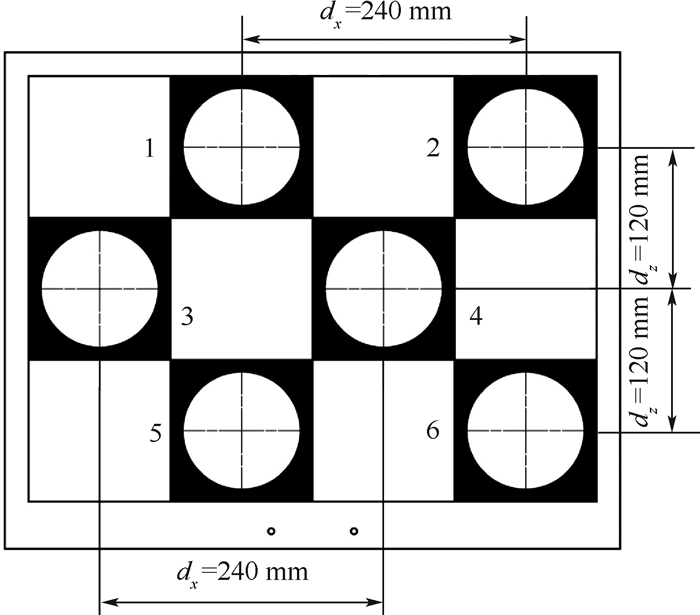
表 1 圆孔中心点坐标值
Table 1. Coordinate value of circular hole center point
标记点 2.0m处圆孔中心坐标值/mm 标记点 2.2m处圆孔中心坐标值/mm 1 (208.90,2015.86,0) 7 (203.33,2225.31,0) 2 (451.83,2025.42,0) 8 (450.04,2230.17,0) 3 (93.47,2011.62,0) 9 (90.09,2214.50,0) 4 (340.23,2022.84,0) 10 (337.90,2220.12,0) 5 (208.96,2016.36,0) 11 (203.61,2225.30,0) 6 (452.58,2029.35,0) 12 (450.22,2229.64,0)  下载: 导出CSV
下载: 导出CSV
表 2 未知量初始值和上下边界值
Table 2. Initial value and upper and lower boundary value of unknown variables
标定参数 初始值 下界值 上界值 X/mm 208.90 168.90 248.90 Y/mm 2065.86 2025.86 2105.86 Z/mm 0 -5 5 α/(°) 0 -2 2 β/(°) 0 -2 2 γ/(°) 0 -2 2 TX/mm 0 -5 5 TY/mm 50 45 55 TZ/mm 0 -5 5
下载: 导出CSV
表 3 标定结果
Table 3. Calibration results
标定参数 数值 X/mm 212.35 Y/mm 2 055.97 Z/mm -2.82 α/(°) 0.011 β(°) -0.091 γ/(°) 0 TX/mm 1.34 TY/mm 45.01 TZ/mm 4.96
下载: 导出CSV
-
[1] HUANG H, BRENNER C, SESTER M.A generative statistical approach to automatic 3D building roof reconstruction from laser scanning data[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2013, 79(5):29-43. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=JJ0230459326 [2] VANEGAS C A, ALIAGA D G, BENES B.Automatic extraction of Manhattan-World building masses from 3D laser range scans[J]. Transactions on Visualization and Computer Graphics, 2012, 18(10):1627-1637. [3] JR O C B, MIZUSHIMA A, ISHⅡ K, et al.Development of an autonomous navigation system using a two-dimensional laser scanner in an orchard application[J]. Biosystems Engineering, 2007, 96(2):139-149. doi: 10.1016/j.biosystemseng.2006.10.012 [4] USAMENTIAGA R, MOLLEDA J, GARCIA D F.Fast and robust laser stripe extraction for 3D reconstruction in industrial environments[J]. Machine Vision and Applications, 2012, 23(1):179-196. doi: 10.1007/s00138-010-0288-6 [5] 王曾兰.基于二维激光雷达数据的三维重建研究[D].沈阳: 东北大学, 2013: 13-17. http://cdmd.cnki.com.cn/Article/CDMD-10145-1015529864.htmWANG Z L.Three dimensional reconstruction based on two dimensional laser radar data[D]. Shenyang: Northeastern University, 2013: 13-17(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10145-1015529864.htm [6] WANG Y K, HUO J, WANG X S.A real-time robotic indoor 3D mapping system using duel 2D laser range finders[C]//The 33rd Chinese Control Conference.Nanjing: Shanghai System Science Press, 2014: 8542-8546. [7] 海智渊.激光3D导航系统设计与研究[D].长春: 长春理工大学, 2014: 7-13. http://cdmd.cnki.com.cn/Article/CDMD-10186-1014187918.htmHAI Z Y.Design and research on 3D laser navigation system[D]. Changchun: Changchun University of Science and Technology, 2014: 7-13(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10186-1014187918.htm [8] 陈辉, 马世伟, NUECHTER A.基于激光扫描和SFM的非同步点云三维重构方法[J].仪器仪表学报, 2016, 17(5):1148-1157. http://d.old.wanfangdata.com.cn/Periodical/yqyb201605024CHEN H, MA S W, NUECHTER A.Non-synchronous point cloud algorithm for 3D reconstruction based on laser scanning and SFM[J]. Chinese Journal of Scientific Instrument, 2016, 17(5):1148-1157(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yqyb201605024 [9] 赵煦.基于地面激光扫描点云数据的三维重建方法研究[D].武汉: 武汉大学, 2010: 18-22. http://cdmd.cnki.com.cn/Article/CDMD-10486-2010167250.htmZHAO X.Research on 3D reconstruction of point cloud from terrestrial laser scanning[D]. Wuhan: Wuhan University, 2010: 18-22(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10486-2010167250.htm [10] 曾齐红.机载激光雷达点云数据处理与建筑物三维重建[D].上海: 上海大学, 2009: 67-75. http://cdmd.cnki.com.cn/Article/CDMD-11903-2009252698.htmZENG Q H.Airborne lidar point cloud data processing and 3D building reconstruction[D]. Shanghai: Shanghai University, 2009: 67-75(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-11903-2009252698.htm [11] SURMANN H, NUCHTER A, HERTZBERG J.An autonomous mobile robot with a 3D laser range finder for 3D exploration and digitalization of indoor environments[J]. Robotics and Autonomous Systems, 2003, 45(3-4):181-198. doi: 10.1016/j.robot.2003.09.004 [12] CHOU Y S, LIU J S.A robotic indoor 3D mapping system using a 2D laser range finder mounted on a rotating four-bar linkage of a mobile platform[J]. International Journal of Advanced Robotic Systems, 2013, 10(1):1-10. doi: 10.5772/52938 [13] 项志宇.快速三维扫描激光雷达的设计及其系统标定[J].浙江大学学报(工学版), 2006, 40(12):2130-2133. doi: 10.3785/j.issn.1008-973X.2006.12.024XIANG Z Y.Fast 3D scanning laser radar system design and calibration[J]. Journal of Zhejiang University(Engineering Science), 2006, 40(12):2130-2133(in Chinese). doi: 10.3785/j.issn.1008-973X.2006.12.024 [14] 曹双倩, 袁培江, 陈冬冬, 等.激光测距传感器光束矢向和零点位置标定方法[J].北京航空航天大学学报, 2018, 44(6):1321-1327. http://bhxb.buaa.edu.cn/CN/abstract/abstract14516.shtmlCAO S Q, YUAN P J, CHEN D D, et al.Calibration method for laser beam direction and zero point of laser displacement sensor[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(6):1321-1327(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14516.shtml [15] 范明争, 韩先国.基于标定及补偿提高串联机器人定位精度方法[J].北京航空航天大学学报, 2017, 43(1):176-183. http://bhxb.buaa.edu.cn/CN/abstract/abstract13901.shtmlFAN M Z, HAN X G.Precision improvement method for serial robot localization based on a new calibration and compensation strategy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(1):176-183(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13901.shtml [16] 郭扬, 杜正春, 姚振强.大尺寸三维激光测量系统标定方法[J].上海交通大学学报, 2012, 46(2):223-227. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201200260445GUO Y, DU Z C, YAO Z Q.Calibration of a large-scale 3D laser measurement system[J]. Journal of Shanghai Jiaotong University, 2012, 46(2):223-227(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201200260445 [17] 付梦印, 李超, 王美玲, 等.基于机器人激光测距数据的三维扫描系统的设计与实现[J].仪器仪表学报, 2008, 29(4):434-438. http://d.old.wanfangdata.com.cn/Conference/6767075FU M Y, LI C, WANG M L, et al. A 3D scanning system based on range data from mobile robot's laser scanner[J]. Chinese Journal of Scientific Instrument, 2008, 29(4):434-438(in Chinese). http://d.old.wanfangdata.com.cn/Conference/6767075 [18] ZHUANG Y, YAN F, HU H.Automatic extrinsic self-calibration for fusing data from monocular vision and 3-D laser scanner[J]. Transactions on Instrumentation and Measurement, 2014, 63(7):1874-1876. doi: 10.1109/TIM.2014.2307731 [19] 熊有伦.机器人技术基础[M].武汉:华中科技大学出版社, 2011:16-26.XIONG Y L.Robot technology foundation[M]. Wuhan:Huazhong University of Science and Technology Press, 2011:16-26(in Chinese). [20] RENFRO C.Encyclopedia of optimization[J]. Reference Reviews, 2009, 584(4):31-52. [21] 刘钦, 刘桂华, 罗颖, 等.基于一维激光测距仪和云台的场景三维重建[J].工具技术, 2011, 45(11):76-79. doi: 10.3969/j.issn.1000-7008.2011.11.024LIU Q, LIU G H, LUO Y, et al.Three-dimensional reconstruction scene algorithm based on one-dimensional laser ranger and pan-tilt[J]. Tool Engineering, 2011, 45(11):76-79(in Chinese). doi: 10.3969/j.issn.1000-7008.2011.11.024 [22] 李赣华.基于摄像机和二维激光测距仪的三维建模关键技术研究[D].长沙: 国防科学技术大学, 2006: 98-99. http://cdmd.cnki.com.cn/Article/CDMD-90002-2008098428.htmLI G H.Key technologies for 3D model construction using camera and 2D laser range finder[D]. Changsha: National University of Defense Technology, 2006: 98-99(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-90002-2008098428.htm -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数: 678
- HTML全文浏览量: 70
- PDF下载量: 622
- 被引次数: 0
