



Fine alignment method for rotary strapdown inertial navigation system based on augmented state
-
摘要:
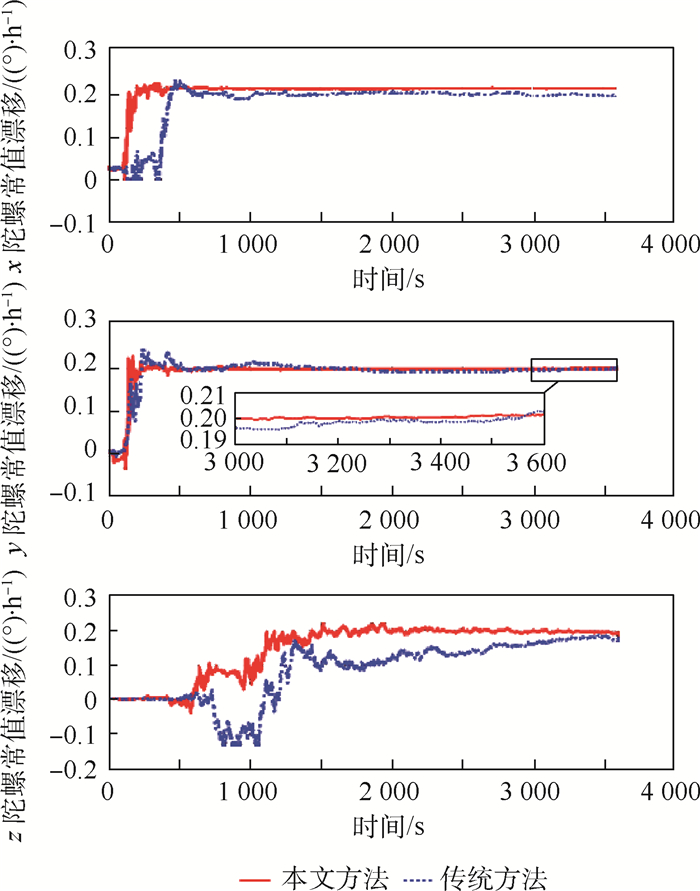
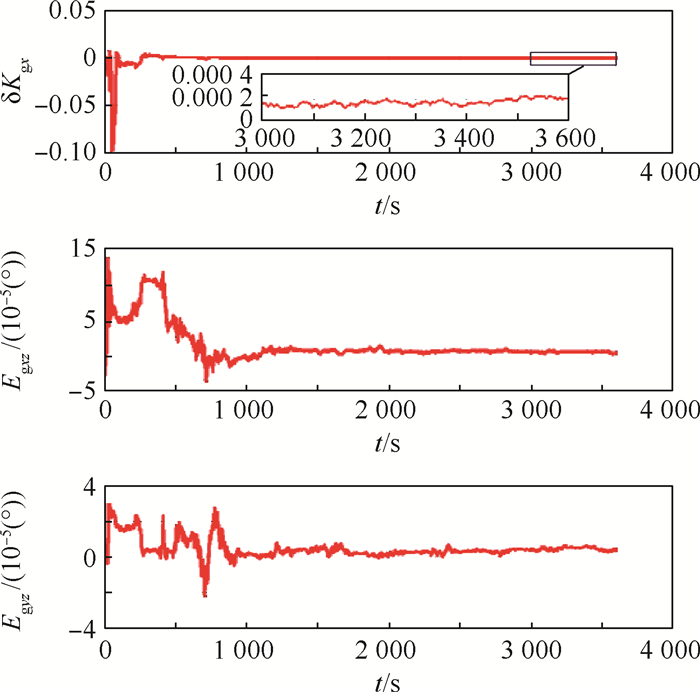
初始对准是旋转式捷联惯导系统(SINS)的关键技术之一。传统旋转式捷联惯导精对准方法多采用10维模型,该模型的精对准精度不能满足导航精度要求。针对此问题,提出了一种基于状态量扩维的旋转式捷联惯导系统精对准方法。首先,将陀螺和加速度计标度因数误差、安装误差扩展为状态变量,建立了28维的精对准模型;然后,对旋转过程中各状态量的可观测度进行分析,根据分析结果将模型优化为13维;最后,采用卡尔曼滤波实现了旋转式捷联惯导系统的精对准。仿真结果表明,与传统初始对准方法相比,该方法能有效提高姿态对准精度,并估计出更多陀螺误差项。
-
关键词:
- 旋转式捷联惯导系统(SINS) /
- 初始对准 /
- 可观测性 /
- 卡尔曼滤波 /
- 精对准
Abstract:Initial alignment is a key technology of rotary strapdown inertial navigation system (SINS). The existing 10D model of traditional rotary SINS is mostly used for the fine alignment, which cannot meet the requirements of navigation accuracy. To solve this problem, a fine alignment method for rotary SINS based on augmented state is proposed. First, scale factor errors and installation errors are extended to state variables, and a 28D fine alignment model is established. Second, the observability of 28D model during rotation is analyzed. Third, a 13D alignment model is designed according to analysis results. Finally, Kalman filter is used to achieve the fine alignment of rotary SINS. The simulation results show that the proposed method can effectively improve the attitude alignment accuracy and estimate more gyroscope error terms compared with the traditional initial alignment method.
-
表 1 各状态量对应的奇异值变化
Table 1. Singular value change of state variables
状态量 奇异值 静止时间段 第一时间段 第二时间段 δVE 1 1.41 3.16 δVN 1 1.41 3.16 φE 13.89 17.82 38.96 φN 13.89 17.82 38.96 φU 1.70×10-25 8.19×10-4 1.95×10-3 ∇x 3.86×10-45 8.31 20.35 ∇y 3.22×10-27 8.31 20.35 εx 9.80 14.07 31.12 εy 9.80 14.07 31.12 εz 5.47×10-4 9.20×10-4 2.15×10-3 δKgx 7.51×10-39 5.10×10-4 2.15×10-3 δKgy 3.85×10-28 1.78×10-15 8.30×10-4 δKgz 2.81×10-41 1.78×10-15 3.26×10-5 Egxy 1.81×10-84 1.78×10-15 1.10×10-4 Egxz 6.45×10-34 1.78×10-15 2.70 Egyx 9.93×10-41 1.78×10-15 1.01×10-8 Egyz 1.44×10-31 1.78×10-15 2.70 Egzx 7.16×10-53 3.71×10-8 5.19×10-8 Egzy 1.90×10-38 1.78×10-15 6.50×10-8 δKax 3.35×10-48 1.78×10-15 3.26×10-5 δKay 7.52×10-45 1.78×10-15 7.90×10-4 δKaz 1.10×10-48 1.78×10-15 5.19×10-8 Eaxy 3.09×10-52 1.78×10-15 3.81×10-15 Eaxz 1.31×10-24 1.78×10-15 3.81×10-15 Eayx 8.62×10-46 1.78×10-15 3.81×10-15 Eayz 1.81×10-45 1.78×10-15 8.96×10-16 Eazx 6.09×10-57 1.78×10-15 3.69×10-8 Eazy 2.97×10-58 1.25×10-15 6.29×10-10  下载: 导出CSV
下载: 导出CSV
表 2 初始对准的姿态角误差
Table 2. Attitude errors of initial alignment (°)
方法 航向角误差 俯仰角误差 横滚角误差 传统方法 0.0314 0.0017 0.0019 本文方法 0.0224 0.0011 0.0012
下载: 导出CSV
-
[1] LV P, LIU J Y, LAI J Z, et al.Decrease in accuracy of a rotational SINS caused by its rotary table's errors[J].International Journal of Advanced Robotic Systems, 2014, 11(1):1-10. doi: 10.5772/56810 [2] LIU Z J, WANG L, WANG W, et al.An improved rotation scheme for tri-axis rotational inertial navigation system[J].Microsystem Technologies, 2017, 23(12):5423-5433. doi: 10.1007/s00542-016-3270-z [3] SUN W, WANG D X, XU L W, et al.MEMS-based rotary strap-down inertial navigation system[J].Measurement, 2013, 46(8):2585-2596. doi: 10.1016/j.measurement.2013.04.035 [4] PEI F J, ZHU L, ZHAO J.Initial self-alignment for marine rotary SINS using novel adaptive Kalman filter[J].Mathematical Problems in Engineering, 2015, 29:1-2. [5] SONG T X, LI K, WANG L, et al.A rapid and high-precision initial alignment scheme for dual-axis rotational inertial navigation system[J].Microsystem Technologies, 2017, 23(12):5515-5525. doi: 10.1007/s00542-017-3286-z [6] 翁海娜, 姚琪, 胡小毛.舰船单轴旋转激光捷联惯导系统动态初始对准[J].中国惯性技术学报, 2012, 20(1):34-38. http://cdmd.cnki.com.cn/Article/CDMD-10217-1012518428.htmWENG H N, YAO Q, HU X M.Dynamic initial alignment for single-axis rotation laser gyro SINS on board ship[J].Journal of Chinese Inertial Technology, 2012, 20(1):34-38(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10217-1012518428.htm [7] GAO W, ZHANG Y, WANG J G.Research on initial alignment and self-calibration of rotary strap-down inertial navigation systems[J].Sensors, 2015, 15(2):3154-3171. doi: 10.3390/s150203154 [8] SUN F, SUN Q, BEN Y Y, et al.A new method of initial alignment and self-calibration based on dual-axis rotating strap-down inertial navigation system[C]//Position Location and Navigation Symposium.Piscataway, NJ: IEEE Press, 2012: 808-813. [9] 赵晓伟, 李江, 党宁, 等.基于单轴连续旋转调制的方位对准技术[J].导弹与航天运载技术, 2016, 2(1):26-30. http://d.old.wanfangdata.com.cn/Periodical/ddyhtyzjs201601008ZHAO X W, LI J, DANG N, et al.Research on azimuth alignment technology based on the single axis continuous rotation modulation[J].Missiles and Space Vehicles, 2016, 2(1):26-30(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/ddyhtyzjs201601008 [10] 徐爱功, 王大雪, 孙伟, 等.无外观测信息的旋转捷联系统组合对准方法[J].测绘科学, 2015, 40(2):29-34. http://d.old.wanfangdata.com.cn/Periodical/chkx201502006XU A G, WANG D X, SUN W, et al.Integrated alignment of rotary SINS with the observation uncertainty[J].Science of Surveying and Mapping, 2015, 40(2):29-34(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/chkx201502006 [11] 杨国梁, 王玮.基于双轴旋转的惯导系统误差自补偿技术[J].北京航空航天大学学报, 2012, 38(4):519-524. http://bhxb.buaa.edu.cn/CN/abstract/abstract12262.shtmlYANG G L, WANG W.Error auto-compensation technology of inertial navigation system based on double-axis rotation[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(4):519-524(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12262.shtml [12] 龙兴武, 于旭东, 张鹏飞, 等.激光陀螺单轴旋转惯性导航系统[J].中国惯性技术学报, 2010, 18(2):149-153. http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb201002003LONG X W, YU X D, ZHANG P F, et al.Single rotating inertial navigation system with ring laser gyroscope[J].Journal of Chinese Inertial Technology, 2010, 18(2):149-153(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zggxjsxb201002003 [13] 汪徐胜, 杨建业, 宋仔标, 等.车载旋转调制捷联惯导系统最优对准技术[J].兵工自动化, 2017, 36(4):10-17. doi: 10.7690/bgzdh.2017.04.003WANG X S, YANG J Y, SONG Z B, et al.Optimum alignment technology for vehicle mounted rotation-modulating SINS[J].Ordnance Industry Automation, 2017, 36(4):10-17(in Chinese). doi: 10.7690/bgzdh.2017.04.003 [14] DU S, SUN W, GAO Y.Improving observability of an inertial system by rotary motions of an IMU[J].Sensors, 2017, 17(4):1-20. doi: 10.1109/JSEN.2016.2643958 [15] SILVA F O, HEMERLY E M, FILHO W C L.On the error state selection for stationary SINS alignment and calibration Kalman filters-Part Ⅱ:Observability/estimability analysis[J].Sensors, 2017, 17(3):1-34. doi: 10.1109/JSEN.2016.2643838 -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 756
- HTML全文浏览量: 134
- PDF下载量: 599
- 被引次数: 0
