



-
摘要:
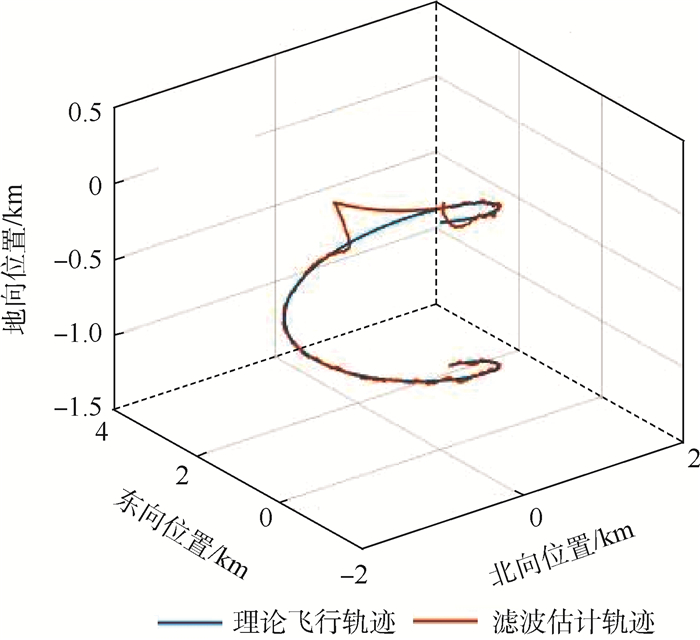
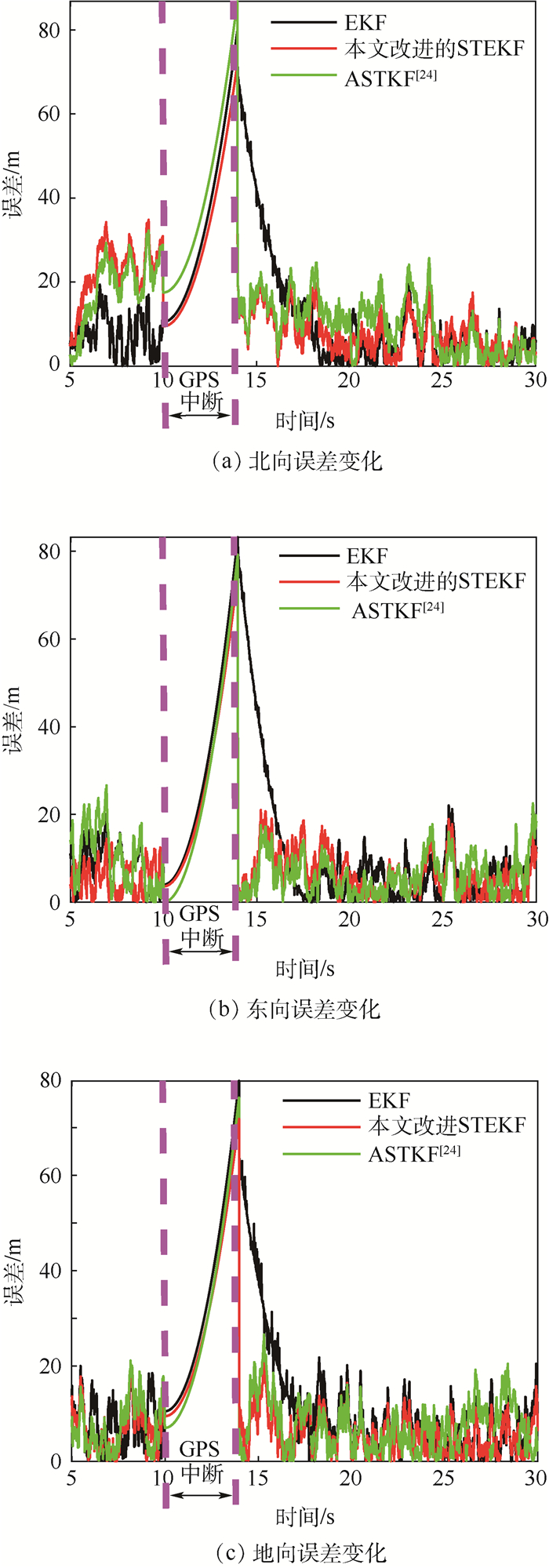
针对无人机惯性(INS)/GPS组合导航系统,考虑导航过程中存在的GPS数据中断的问题,设计了一种改进的滤波算法。首先建立了无人机导航运动学模型,再将传统的扩展卡尔曼滤波(EKF)技术和强跟踪滤波结合,利用模糊理论中的隶属度函数设计了一种模糊强跟踪扩展卡尔曼滤波(STEKF)算法。仿真结果表明,所设计的改进算法能够快速适应GPS信号突变,即当GPS信号从故障状态恢复到正常状态时,改进算法相较普通EKF算法能更快速地收敛到稳定状态,重新完成对飞行状态的估计。同时相较普通EKF和强跟踪扩展卡尔曼滤波算法,改进算法具有更高的滤波精度。
-
关键词:
- 扩展卡尔曼滤波(EKF) /
- 强跟踪滤波 /
- 组合导航 /
- 全球定位系统(GPS) /
- 隶属度函数
Abstract:Aimed at the problem of GPS data interruption in the UAV INS/GPS integrated navigation system, an improved filtering algorithm is designed. Firstly, the kinematics model of UAV navigation is established. Then the traditional extended Kalman filter (EKF) technique and strong tracking filter are combined. A new navigation filtering algorithm is designed by using the membership function in fuzzy theory. The simulation results show that the improved algorithm can quickly adapt to the sudden change of GPS signal. When the GPS signal recovers from the fault state to the normal state, the improved algorithm can converge to the steady state more quickly than the ordinary EKF algorithm, and the flight state is re-completed and estimated. At the same time, compared with the common EKF and strong tracking extended Kalman filter (STEKF) algorithm, the improved algorithm has higher filtering accuracy.
-
[1] 李子月, 张林, 陈善秋, 等.捷联惯性/卫星超紧组合导航技术综述与展望[J].系统工程与电子技术, 2016, 38(4):866-874. http://www.cnki.com.cn/Article/CJFDTotal-XTYD201604022.htmLI Z Y, ZHANG L, CHEN S Q, et al.Ultra-tightly coupled SINS/GLASS navigation technology review and prospect[J].Systems Engineering and Electronics, 2016, 38(4):866-874(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-XTYD201604022.htm [2] 樊云鹏, 杨锁昌.GNSS/INS深组合导航关键技术研究[J].飞航导弹, 2017(10):22-25. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fhdd201710005FAN Y P, YANG S C.Research on key technologies of GNSS/INS deep integrated navigation[J].Aerodynamic Missile Journal, 2017(10):22-25(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fhdd201710005 [3] 韩乃龙.高动态惯性/卫星组合导航技术研究[D].南京: 南京理工大学, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10288-1017053559.htmHAN N L.Research on high dynamic inertial/satellite integrated navigation technology[D].Nanjing: Nanjing University of Science and Technology, 2017(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10288-1017053559.htm [4] 王辰熙.多旋翼无人机组合导航技术研究[D].南京: 南京航空航天大学, 2017. http://cdmd.cnki.com.cn/Article/CDMD-10287-1017875103.htmWANG C X.Research on integrated navigation technology for multi-rotor unmanned aerial vehicle[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2017(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1017875103.htm [5] KALMAN R E.A new approach to linear filtering and prediction problems[J].Journal of Basic Engineering Transactions, 1960, 82(1):35-45. doi: 10.1115/1.3662552 [6] BUCY R.Nonlinear filtering theory[J].IEEE Transactions on Automatic Control, 1965, 10(2):198. doi: 10.1109/TAC.1965.1098109 [7] JULIER S, UHLMANN J, DURRANTWHYTE H F.A new method for the nonlinear transformation of means and covariances in filters and estimators[J].IEEE Transactions on Automatic Control, 2000, 45(3):477-482. doi: 10.1109/9.847726 [8] 景丽.基于卡尔曼滤波组合导航算法的计算量与精度分析[D].哈尔滨: 哈尔滨工业大学, 2014. http://cdmd.cnki.com.cn/Article/CDMD-10213-1015979797.htmJING L.Analysis of calculation and precision based on Kalman filter combined navigation algorithm[D].Harbin: Harbin Insti-tute of Technology, 2014(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10213-1015979797.htm [9] PERSSON S M, SHARF I.Invariant momentum-tracking Kalman filter for attitude estimation[C]//2012 IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2012: 592-598. [10] TAYLOR C N.An analysis of observability-constrained Kalman filtering for vision-aided navigation[C]//Position Location and Navigation Symposium.Piscataway, NJ: IEEE Press, 2012: 1240-1246. [11] JIANG Z, ZHOU W, LI H, et al.A new kind of accurate calibration method for robotic kinematic parameters based on the extended Kalman and particle filter algorithm[J].IEEE Transactions on Industrial Electronics, 2018, 65(4):3337-3345. doi: 10.1109/TIE.2017.2748058 [12] DAVARI N, GHOLAMI A.An asynchronous adaptive direct Kalman filter algorithm to improve underwater navigation system performance[J].IEEE Sensors Journal, 2017, 17(4):1061-1068. doi: 10.1109/JSEN.2016.2637402 [13] 李兆铭, 杨文革, 丁丹, 等.多星对合作目标的分布式协同导航滤波算法[J].北京航空航天大学学报, 2018, 44(3):462-469. https://bhxb.buaa.edu.cn/CN/abstract/abstract14362.shtmlLI Z M, YANG W G, DING D, et al.Distributed cooperative navigation filtering algorithm for multi-satellite cooperative targets[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3):462-469(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract14362.shtml [14] SUN F, TANG L.Augmented and non-augmented cubature Kalman filter[J].Journal of Information & Computational Science, 2012, 9(2):437-450. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0225772107/ [15] 赵曦晶, 刘光斌, 汪立新, 等.五阶容积卡尔曼滤波算法及其应用[J].红外与激光工程, 2015, 44(4):1377-1381. doi: 10.3969/j.issn.1007-2276.2015.04.046ZHAO X J, LIU G B, WANG L X, et al.Fifth-order volume Kalman filter algorithm and its application[J].Infrared and Laser Engineering, 2015, 44(4):1377-1381(in Chinese). doi: 10.3969/j.issn.1007-2276.2015.04.046 [16] 刘旭, 张其善, 杨东凯.一种用于GPS/DR组合定位的非线性滤波算法[J].北京航空航天大学学报, 2007, 33(2):184-187. doi: 10.3969/j.issn.1001-5965.2007.02.013LIU X, ZHANG Q S, YANG D K.A nonlinear filtering algorithm for GPS/DR combined positioning[J].Journal of Beijing University of Aeronautics and Astronantics, 2007, 33(2):184-187(in Chinese). doi: 10.3969/j.issn.1001-5965.2007.02.013 [17] MARINA H G D.UAV attitude estimation using unscented Kalman filter and TRIAD[J].IEEE Transactions on Industrial Electronics, 2012, 59(11):4465-4474. doi: 10.1109/TIE.2011.2163913 [18] GUPTA S D, YU J Y, MALLICK M, et al.Comparison of angle-only filtering algorithms in 3D using EKF, UKF, PF, PFF, and ensemble KF[C]//18th International Conference on Information Fusion.Piscataway, NJ: IEEE Press, 2015: 1649-1656. [19] CHANG L, HU B, LI A, et al.Transformed unscented Kalman filter[J].IEEE Transactions on Automatic Control, 2012, 58(1):252-257. http://d.old.wanfangdata.com.cn/NSTLQK/NSTL_QKJJ0231352193/ [20] 薛远奎.小型旋翼无人机姿态融合及导航方法[D].成都: 电子科技大学, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10614-1016176273.htmXUE Y K.Attitude fusion and navigation method of small rotorcraft[D].Chengdu: University of Electronic Science and Technology of China, 2016(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10614-1016176273.htm [21] 王亭亭, 蔡志浩, 王英勋.无人机室内视觉/惯导组合导航方法[J].北京航空航天大学学报, 2018, 44(1):176-186. https://bhxb.buaa.edu.cn/CN/abstract/abstract14229.shtmlWANG T T, CAI Z H, WANG Y X.Indoor vision/INS integrated navigation method for UAV[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(1):176-186(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract14229.shtml [22] 钱华明, 王迪, 吴永慧.小视场星敏感器量测延时滤波算法[J].北京航空航天大学学报, 2019, 45(2):234-242. https://bhxb.buaa.edu.cn/CN/abstract/abstract14708.shtmlQIAN H M, WANG D, WU Y H.Delayed filtering algorithm for small field of view star sensor measurement[J].Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2):234-242(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract14708.shtml [23] 王尔申, 贾超颖, 曲萍萍, 等.基于混沌粒子群优化的北斗/GPS组合导航选星算法[J].北京航空航天大学学报, 2019, 45(2):259-265. https://bhxb.buaa.edu.cn/CN/abstract/abstract14711.shtmlWANG E S, JIA C Y, QU P P, et al.Beidou/GPS integrated navigation star selection algorithm based on chaotic particle swarm optimization[J].Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(2):259-265(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract14711.shtml [24] LIN C L, CHANG Y M, HUNG C C, et al.Position estimation and smooth tracking with a fuzzy-logic-based adaptive strong tracking Kalman filter for capacitive touch panels[J].IEEE Transactions on Industrial Electronics, 2015, 62(8):5097-5108. doi: 10.1109/TIE.2015.2396874 -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 710
- HTML全文浏览量: 49
- PDF下载量: 347
- 被引次数: 0
