



-
摘要:
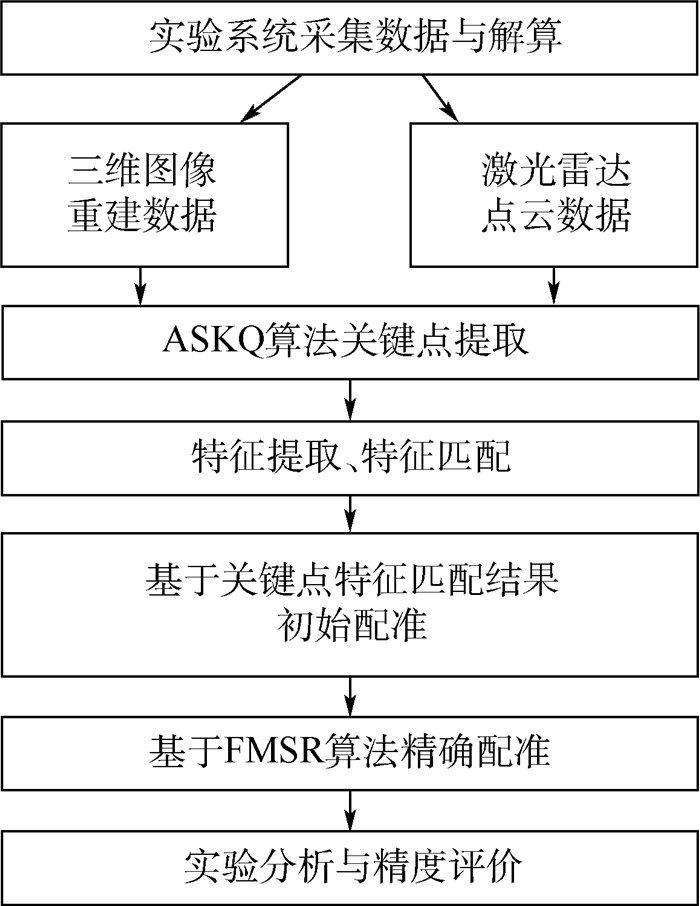
为了实现激光雷达点云与图像重建点云的三维空间配准,基于自研三维扫描激光雷达系统,提出了新型的快速多尺度因子(FMSR)点云配准算法,研究了空间点云配准技术。该算法主要包括初始配准和精确配准2个步骤:初始配准使用基于尺度自适应关键点质量(ASKQ)的点云特征提取算法,提取关键点的特征匹配对,求解点云配准初始参数;精确配准利用K-邻近(KNN)算法全局搜索,提升计算效率,多次迭代得到2组点云之间的最优旋转矩阵、最优平移向量和最优尺度因子。仿真和实验结果表明,所提出的算法对空间目标(尺寸为20.30 m×7.85 m×26.56 m)实现空间点云配准,配准精度达到0.194 m,运行时间为16.207 s;与多尺度迭代最近点(S-ICP)算法相比,配准精度提高了0.131 m,运行时间提高了30%。所提出的空间点云配准技术可为场景重建和纹理匹配提供算法基础。
-
关键词:
- 激光雷达 /
- 图像重建 /
- 空间点云配准 /
- 尺度自适应关键点质量(ASKQ)算法 /
- 快速多尺度因子(FMSR)点云配准算法
Abstract:In order to realize the registration of point cloud data respectively obtained from LiDAR and camera, we used a fast multi-scale registration (FMSR) algorithm to register the point cloud data, based on a self-designed three-dimensional scanning laser radar system in our laboratory. The algorithm includes two steps:coarse registration and fine registration. In the coarse registration, an adaptive scale key point quality (ASKQ) algorithm was used to match key points and determine the initial parameters for fine registration. And in the fine registration, K-nearest neighbors (KNN) algorithm was used to simplify the search process and improve the algorithm efficiency. The optimal rotation matrix, translation vector and scale factor between two sets of point cloud data were obtained through many iterations. The simulation verified the stability of FMSR algorithm for multiscale registration. Simulation and experimental results show that the proposed algorithm successfully registers the point cloud data of the self-made LiDAR system and commercial camera. The root-mean-square error of the registration is 0.194 m and the execution time is 16.207 s, for a building with size of 20.30 m×7.85 m×26.56 m. Compared with an existing scale-iterative closest point (S-ICP) algorithm, the registration accuracy of the proposed algorithm is improved by 0.131 m, and the execution time is reduced by 30%. The proposed point cloud registration method can provide an algorithm basis for scene reconstruction and texture matching.
-

图 3 多尺度小鸡模型的关键点提取结果
Figure 3. Key point extraction results of multi-scale chicken model

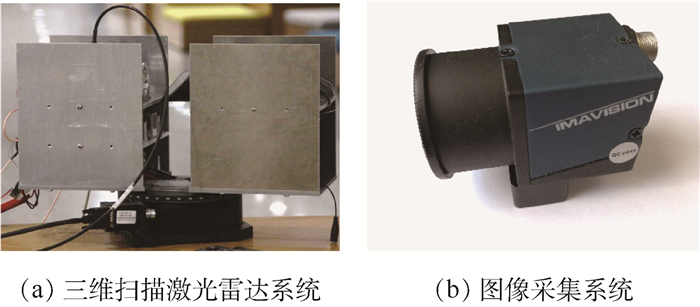
图 6 北京航空航天大学晨兴音乐厅建筑的实验现场
Figure 6. Building experimental site of Chenxing Concert Hall in Beihang University
表 1 FMSR算法精确配准结果
Table 1. Fine registration results of FMSR algorithm
理论值μ 最优尺度因子S 最优旋转矩阵R 最优平移向量T 均方根误差Qrms/m 时间/s 0.5 0.487 (-0.483, 0.010, -0.049) (2.659, -145.708, -25.783) 0.002 4.043 1 0.977 (-0.483, 0.010, -0.049) (5.338, -291.396, -51.402) 0.002 2.601 2 1.954 (-0.483, 0.010, -0.049) (10.679, -582.779, -102.807) 0.002 2.509 10 9.768 (-0.483, 0.010, -0.049) (53.439, -2 913.906, -513.807) 0.002 2.489  下载: 导出CSV
下载: 导出CSV
表 2 S-ICP算法与FMSR算法对比
Table 2. Comparison of S-ICP and FMSR algorithms
参数 S-ICP算法 FMSR算法 最优尺度因子S 3.000 3.300 最优旋转矩阵R (1.683, -0.035, 0.935) (1.561, -0.044, -2.214) 最优平移向量T (-39.233, -29.415, 2.564) (17.394, 12.485, -0.957) 均方根误差Qrms/m 0.325 0.194 时间/s 23.212 16.207
下载: 导出CSV
-
[1] 骆社周, 习晓环, 王成.激光雷达遥感在文化遗产保护中的应用[J].遥感技术与应用, 2014, 29(6):1054-1059. http://d.old.wanfangdata.com.cn/Periodical/ygjsyyy201406021LUO S Z, XI X H, WANG C.The application of LiDAR remote sensing of cultural heritage preservation[J].Remote Sensing Technology and Application, 2014, 29(6):1054-1059(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/ygjsyyy201406021 [2] 赵一鸣, 李艳华, 商雅楠, 等.激光雷达的应用及发展趋势[J].遥测遥控, 2014, 35(5):4-22. doi: 10.3969/j.issn.2095-1000.2014.05.002ZHAO Y M, LI Y H, SHANG Y N, et al.Application and development direction of LiDAR[J].Journal of Telemetry, Tracking and Command, 2014, 35(5):4-22(in Chinese). doi: 10.3969/j.issn.2095-1000.2014.05.002 [3] 曾齐红.机载激光雷达点云数据处理与建筑物三维重建[D].上海: 上海大学, 2009. http://cdmd.cnki.com.cn/Article/CDMD-11903-2009252698.htmZENG Q H.Airborne LiDAR point cloud data processing and 3D building reconstruction[D]. Shanghai: Shanghai University, 2009(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-11903-2009252698.htm [4] YANG M D, CHAO C F, HUANG K S, et al.Image-based 3D scene reconstruction and exploration in augmented reality[J]. Automation in Construction, 2013, 33:48-60. doi: 10.1016/j.autcon.2012.09.017 [5] WANG R.3D building modeling using images and LiDAR:A review[J].International Journal of Image and Data Fusion, 2013, 4(4):273-292. doi: 10.1080/19479832.2013.811124 [6] ABAYOWA B O, YILMAZ A, HARDIE R C.Automatic registration of optical aerial imagery to a LiDAR point cloud for generation of city models[J].ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 106:68-81. doi: 10.1016/j.isprsjprs.2015.05.006 [7] 王欣, 张明明, 于晓, 等.应用改进迭代最近点方法的点云数据配准[J].光学精密工程, 2012, 20(9):2068-2077. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201209026WANG X, ZHANG M M, YU X, et al.Point cloud registration based on improved iterative closest point method[J].Optics and Precision Engineering, 2012, 20(9):2068-2077(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201209026 [8] BESL P J, MCKAY N D.A method for registration of 3-D shapes[J].Proceedings of SPIE-The International Society for Optical Engineering, 1992, 14(3):239-256. http://cn.bing.com/academic/profile?id=8cbd56d19370d28b22837979c6fb8d92&encoded=0&v=paper_preview&mkt=zh-cn [9] YING S, PENG J, DU S, et al.A scale stretch method based on ICP for 3D data registration[J].IEEE Transactions on Automation Science and Engineering, 2009, 6(3):559-565. doi: 10.1109/TASE.2009.2021337 [10] CHEN Y, MEDIONI G.Object modelling by registration of multiple range images[J].Image and Vision Computing, 1992, 10(3):145-155. doi: 10.1016/0262-8856(92)90066-C [11] RUSINKIEWICZ S, LEVOY M.Efficient variants of the ICP algorithm[C]//Proceedings 3rd International Conference on 3-D Digital Imaging and Modeling.Piscataway, NJ: IEEE Press, 2001: 145-152. [12] 戴静兰, 陈志杨, 叶修梓.ICP算法在点云配准中的应用[J].中国图象图形学报, 2007, 12(3):517-521. doi: 10.3969/j.issn.1006-8961.2007.03.023DAI J L, CHEN Z Y, YE X Z.The application of ICP algorithm in point cloud alignment[J].Journal of Image and Graphics, 2007, 12(3):517-521(in Chinese). doi: 10.3969/j.issn.1006-8961.2007.03.023 [13] 邹际祥.基于KD-tree加速的点云数据配准技术研究[D].合肥: 安徽大学, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10357-1013258892.htmZOU J X.The research of point cloud data registration technique based on KD-tree acceleration[D].Hefei: Anhui University, 2013(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10357-1013258892.htm [14] MIAN A, BENNAMOUN M, OWENS R.On the repeatability and quality of keypoints for local feature-based 3D object retrieval from cluttered scenes[J].International Journal of Computer Vision, 2010, 89(2-3):348-361. doi: 10.1007/s11263-009-0296-z [15] LI X L, LI Y Y, XU L J.Terrestrial laser scanner autonomous self-calibration with no prior knowledge of point-clouds[J].IEEE Sensors Journal, 2018, 18(22):9277-9285. doi: 10.1109/JSEN.2018.2869559 [16] LI X L, LI Y Y, XIE X H, et al.Lab-built terrestrial laser scanner self-calibration using mounting angle error correction[J].Optics Express, 2018, 26(11):14444-14460. doi: 10.1364/OE.26.014444 [17] LI X L, YANG B W, XIE X H, et al.Influence of waveform characteristics on LiDAR ranging accuracy and precision[J]. Sensors, 2018, 18(4):1156-1172. doi: 10.3390/s18041156 [18] LI X L, WANG H M, YANG B W, et al.Influence of time-pickoff circuit parameters on LiDAR range precision[J]. Sensors, 2017, 17(10):2369-2389. doi: 10.3390/s17102369 [19] XU L J, FENG J, LI X L, et al.Automatic registration method for TLS LiDAR data and image-based reconstructed data[J].IEEE Geoscience and Remote Sensing Letters, 2018, 16(3):482-486. http://cn.bing.com/academic/profile?id=a1e664cbbe722c97e4310bcc58d0d757&encoded=0&v=paper_preview&mkt=zh-cn -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 893
- HTML全文浏览量: 128
- PDF下载量: 522
- 被引次数: 0
