



-
摘要:
在目标跟踪领域,交互多模型(IMM)估计器具有良好的性能和较低的复杂度。IMM的成功归因于模式混合,其中各模型输出用于模型条件重初始化。针对IMM算法中存在的非等维状态混合估计问题进行了研究,在总结现有算法的基础上提出了一种最优的IMM混合估计方法。该方法通过将"切换"态的概念引入目标状态,根据当前滤波时刻的模型概率和新息,动态地调整混合策略以实现最优估计。最后,通过仿真实验验证了所提算法在不同模型混合场景中的表现要优于现有的算法。
-
关键词:
- 目标跟踪 /
- 滤波 /
- 交互多模型(IMM) /
- 混合估计 /
- 非等维状态
Abstract:The interacting multiple model (IMM) estimator has been proven to be of excellent performance and low complexity in tracking agile targets. The success of IMM attributes to mode mixing, where model outputs are mixed for model-conditional reinitialization. The problem of unequal dimension states mixing in IMM estimation is studied and an optimal method for IMM mixing is proposed based on summarizing the existing methods. By introducing the concept of "switching" state into the target state, the new method dynamically adjusts the hybrid strategy with model probability and innovation to achieve optimal estimation. The simulation results show that the proposed approach outperforms the existing algorithms in the scenarios of mixing different models.
-

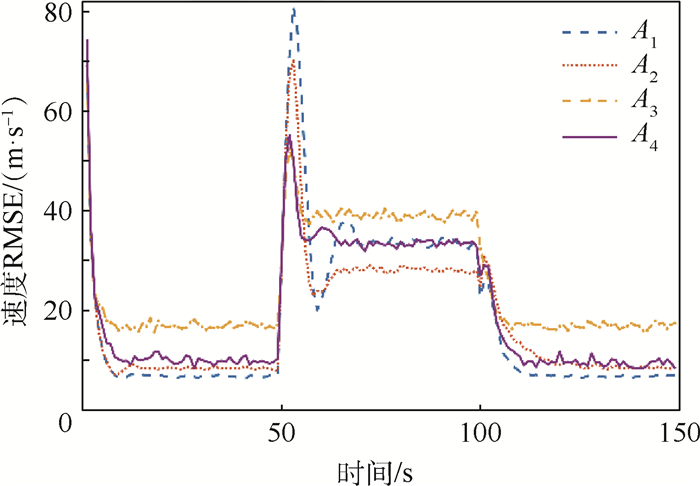
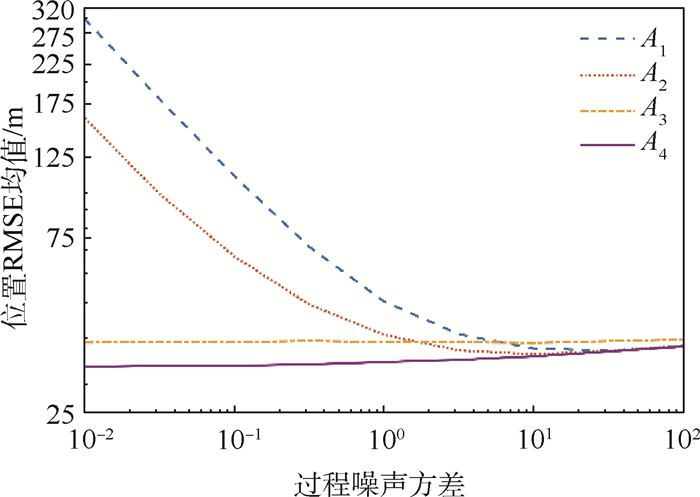
图 7 不同过程噪声下场景1位置均方根误差均值
Figure 7. Mean value of position RMSE of Scenario 1 under different process noises
-
[1] LI X R, JILKOV V P.Survey of maneuvering target tracking.Part V.Multiple-model methods[J].IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(4):1255-1321. doi: 10.1109/TAES.2005.1561886 [2] MAZOR E, AVERBUCH A, BAR-SHALOM Y, et al.Interacting multiple model methods in target tracking:A survey[J].IEEE Transactions on Aerospace and Electronic Systems, 1998, 34(1):103-123. doi: 10.1109/7.640267 [3] FOO P H, NG G W.Combining the interacting multiple model method with particle filters for manoeuvring target tracking[J].IET Radar, Sonar & Navigation, 2011, 5(3):234-255. http://cn.bing.com/academic/profile?id=01c95f5140dc5e6cf0c125c59517ae3a&encoded=0&v=paper_preview&mkt=zh-cn [4] 翟岱亮, 雷虎民, 李炯, 等.基于自适应IMM的高超声速飞行器轨迹预测[J].航空学报, 2016, 37(11):3466-3475. http://d.old.wanfangdata.com.cn/Periodical/hkxb201611024ZHAI D L, LEI H M, LI J, et al.Trajectory prediction of hypersonic vehicle based on adaptive IMM[J].Acta Aeronautica et Astronautica Sinica, 2016, 37(11):3466-3475(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201611024 [5] LI X R.Multiple-model estimation with variable structure.II.Model-set adaptation[J].IEEE Transactions on Automatic Control, 2000, 45(11):2047-2060. doi: 10.1109/9.887626 [6] JAFFER A G, GUPTA S C.On estimation of discrete processes under multiplicative and additive noise conditions[J].Information Sciences, 1971, 3(3):267-276. doi: 10.1016/S0020-0255(71)80010-5 [7] BLOM H A P, BAR-SHALOM Y.The interacting multiple model algorithm for systems with Markovian switching coefficients[J].IEEE Transactions on Automatic Control, 1988, 33(8):780-783. doi: 10.1109/9.1299 [8] LI X R, BAR-SHALOM Y.Multiple-model estimation with variable structure[J].IEEE Transactions on Automatic Control, 1996, 41(4):478-493. doi: 10.1109/9.489270 [9] LAN J, LI X R.Equivalent-model augmentation for variable-structure multiple-model estimation[J].IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(4):2615-2630. doi: 10.1109/TAES.2013.6621840 [10] XU L, LI X R, DUAN Z.Hybrid grid multiple-model estimation with application to maneuvering target tracking[J].IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(1):122-136. doi: 10.1109/TAES.2015.140423 [11] BAR-SHALOM Y, WILLETT P K, TIAN X.Tracking and data fusion[M].Storrs:YBS Publishing, 2011. [12] YUAN T, BAR-SHALOM Y, WILLETT P, et al.A multiple IMM estimation approach with unbiased mixing for thrusting projectiles[J].IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(4):3250-3267. doi: 10.1109/TAES.2012.6324701 [13] GRANSTRÖM K, WILLETT P, BAR-SHALOM Y.Systematic approach to IMM mixing for unequal dimension states[J].IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4):2975-2986. doi: 10.1109/TAES.2015.150015 [14] LOPEZ R, DANÈS P, ROYER F.Extending the IMM filter to heterogeneous-order state space models[C]//49th IEEE Conference on Decision and Control (CDC).Piscataway, NJ: IEEE Press, 2010: 7369-7374. [15] BAR-SHALOM Y, BIRMIWAL K.Variable dimension filter for maneuvering target tracking[J].IEEE Transactions on Aerospace and Electronic Systems, 1982, 27(5):621-629. doi: 10.1109-TAES.1982.309274/ [16] JIN B, JIU B, SU T, et al.Switched Kalman filter-interacting multiple model algorithm based on optimal autoregressive model for manoeuvring target tracking[J].IET Radar, Sonar & Navigation, 2014, 9(2):199-209. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e1e669339a0e8d32a2585e2c4a7aa6bb [17] LI X R, JILKOV V P.Survey of maneuvering target tracking.Part IV: Decision-based methods[C]//SPIE Proceedings Series.Society of Photo-Optical Instrumentation Engineers.Piscataway, NJ: IEEE Press, 2002: 511-534. [18] LOPEZ R, DANES P.Low-complexity IMM smoothing for jump Markov nonlinear systems[J].IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3):1261-1272. doi: 10.1109/TAES.2017.2669698 [19] KALMAN R E.A new approach to linear filtering and prediction problems[J].Journal of basic Engineering, 1960, 82(1):35-45. doi: 10.1115/1.3662552 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 792
- HTML全文浏览量: 109
- PDF下载量: 370
- 被引次数: 0
