



-
摘要:
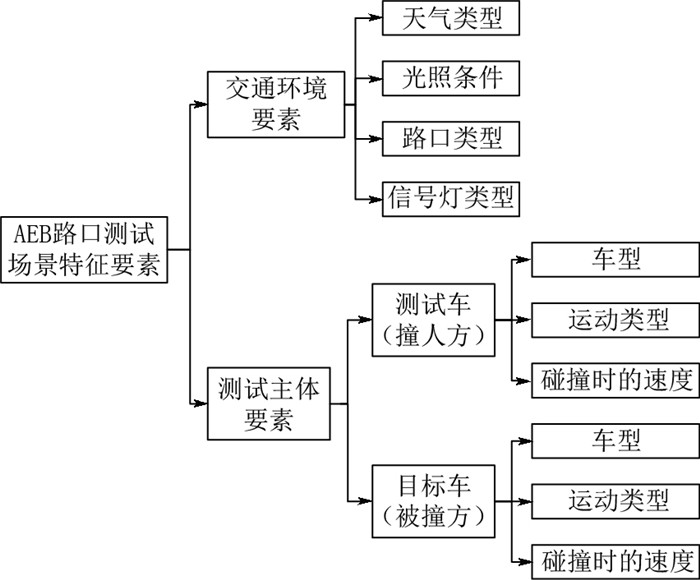
基于国家车辆事故深度调查体系中499例真实的路口事故数据,研究适应于中国的自动紧急制动系统(AEB)路口测试场景。通过基于多元Logistic回归的事故严重程度影响因素分析,提取自动驾驶测试场景的特征要素,构建测试场景。以场景特征要素为聚类参数,采用层次聚类算法挖掘得到了8类路口机动车碰撞典型危险场景,建立了8类适应于中国交通状况的AEB路口测试场景。研究表明:中国的路口场景与Euro-NCAP法规场景有一定的相似性,但较国外更加复杂,其中十字路口的左转与直行冲突是需要重点测试的场景。研究结果可为国内AEB系统的开发和测试提供参考,也可作为建立中国AEB路口测试评价体系的依据。
-
关键词:
- 测试场景 /
- 自动紧急制动系统(AEB) /
- 路口事故 /
- Logistic回归 /
- 聚类分析
Abstract:Based on 499 real intersection accident data in the national automobile accident in-depth investigation system, this paper aims to study the Autonomous Emergency Braking system (AEB) intersection test scenarios adapted to China. The feature elements of the autonomous driving test scenarios are extracted by analyzing the factors affecting the severity of accidents based on multi-Logistic regression, and the test scenarios are constructed. Taking scenario feature elements as clustering parameters, the hierarchical clustering algorithm is used to obtain 8 kinds of typical dangerous scenarios of the collision in intersections. Eight kinds of AEB intersection test scenarios adapted to China's traffic conditions are established. The research shows that China's intersection scenarios have certain similarities with the Euro-NCAP regulations, but they are more complicated than foreign countries, and the conflict of turn left and go straight at crossroads is the scenario that needs to be focused on. This study takes the lead in conducting domestic AEB intersection test scenarios research, which can provide reference for the development and test of domestic AEB system, and can be used as the basis for establishing China AEB intersection test evaluation system.
-
表 1 NAIS数据库与全国道路交通事故统计年报(2017年度)对比
Table 1. Comparison between NAIS database and annual report on national road traffic accidents(2017)
序号 参数 参数特征 特征占全部
样本的百分比差值/% NAIS 年报 1 天气
类型晴或多云 70.52 74.75 4.23 阴天 15.04 14.47 0.57 雨天等恶劣天气 14.10 10.78 3.32 2 光照
条件日间 45.93 58.12 12.19 晨昏 9.59 4.57 5.02 夜晚 44.49 37.30 7.19 3 路段
信息普通路段 49.96 73.30 23.34 十字路口 26.71 11.85 14.86 丁字路口 9.93 8.27 1.66 其他 13.4 6.58 6.82 4 事故
对象机动车与机动车
机动车与两轮车40.17
19.1069.23 9.96 机动车与人相撞 15.76 22.94 7.18 机动车单车事故 24.97 7.83 17.14  下载: 导出CSV
下载: 导出CSV
表 2 Logistic回归分析变量
Table 2. Variables for Logistic regression analysis
序号 变量名 数学表达 变量取值 编码值 1 事故严重程度 y 轻微事故 1 一般事故 2 重(特)大事故 3 2 天气类型 x1 晴或多云 1 阴天 2 雨天等恶劣天气 3 3 光照条件 x2 日间 1 晨昏 2 夜晚有路灯照明 3 夜晚无路灯照明 4 4 事故地点 x3 市中心 1 非市中心 2 高速公路 3 其他 4 5 路口类型 x4 十字路口 1 丁字路口 0 6 信号灯类型 x5 直行+转弯信号 1 仅有直行信号 2 没有信号灯 3 7 道路干湿度 x6 干 1 湿 0
下载: 导出CSV
表 3 模型拟合信息
Table 3. Model fitting information
模型 模型拟合准则 似然比检验 -2对数似然 χ2 自由度 显著性水平 截距模型 376.279 拟合模型 313.697 62.581 24 0.000027
下载: 导出CSV
表 4 Logistic回归分析结果
Table 4. Logistic regression analysis results
变量 模型拟合准则 似然比检验 -2对数似然 χ2 自由度 显著性水平 截距 313.697 0 0 天气类型 316.769 3.072 4 0.546 光照条件 332.731 19.034 6 0.004 事故地点 320.622 6.925 6 0.328 路口类型 322.244 8.547 2 0.014 信号灯类型 327.448 13.751 4 0.008 道路干湿度 318.108 4.410 2 0.110
下载: 导出CSV
表 5 三值变量转换为二值变量
Table 5. Conversion of ternary variables to binary variables
变量
车型转换前 转换后 三值变量 是否乘用车 是否商用车 是否两轮车 乘用车 1 0 0.5 0.5 商用车 2 0.5 0 0.5 两轮车 3 0.5 0.5 0 注:0—是,0.5—否。
下载: 导出CSV
表 6 聚类参数的特征及数值表示
Table 6. Characteristics and numerical representation of clustering parameters
类型 参数 参数特征 初始数
值表示转换/标准化
后数值表示名义 天气类型 晴或多云 1 0, 0.5, 0.5 阴天 2 0.5, 0, 0.5 雨天等恶劣天气 3 0.5, 0.5, 0 名义 光照条件 日间 1 0, 0.5, 0.5 夜晚有路灯照明 2 0.5, 0, 0.5 夜晚无路灯照明 3 0.5, 0.5, 0 名义 路口类型 十字路口 0 0 丁字路口 1 1 名义 信号灯类型 直行+转弯信号 1 0, 0.5, 0.5 仅有直行信号 2 0.5, 0, 0.5 没有信号灯 3 0.5, 0.5, 0 名义 运动类型
(撞人方/被撞方)直行 1 0, 0.5, 0.5 左转 2 0.5, 0, 0.5 右转 3 0.5, 0.5, 0 名义 车型(撞人方/
被撞方)乘用车 1 0, 0.5, 0.5 商用车 2 0.5, 0, 0.5 两轮车 3 0.5, 0.5, 0 间隔 碰撞时的
速度(撞人方)最小值 0 0 最大值 118 1 间隔 碰撞时的
速度(被撞方)最小值 0 0 最大值 127 1
下载: 导出CSV
表 7 速度取值分析
Table 7. Speed value analysis
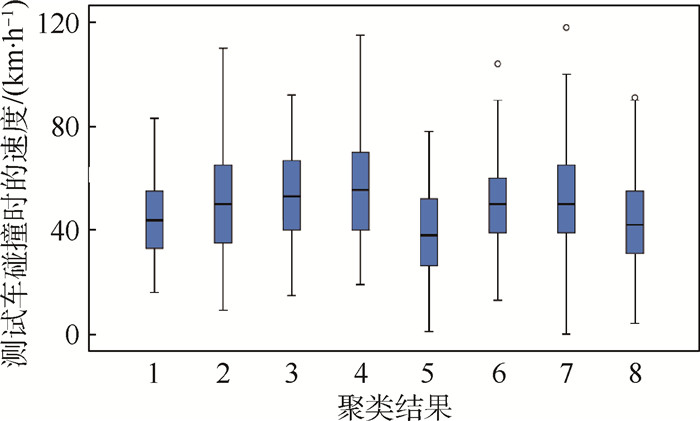
场景类型 第1类 第2类 第3类 第4类 第5类 第6类 第7类 第8类 测试车速度(中位数)/(km·h-1) 44 50 53 56 38 50 50 42 测试车速度/(km·h-1) 45 50 55 55 40 50 50 40 目标车速度(中位数)/(km·h-1) 25 21 30 40 40 23 40 33 目标车速度/(km·h-1) 25 20 30 40 40 25 40 35
下载: 导出CSV
表 8 聚类结果
Table 8. Clustering results
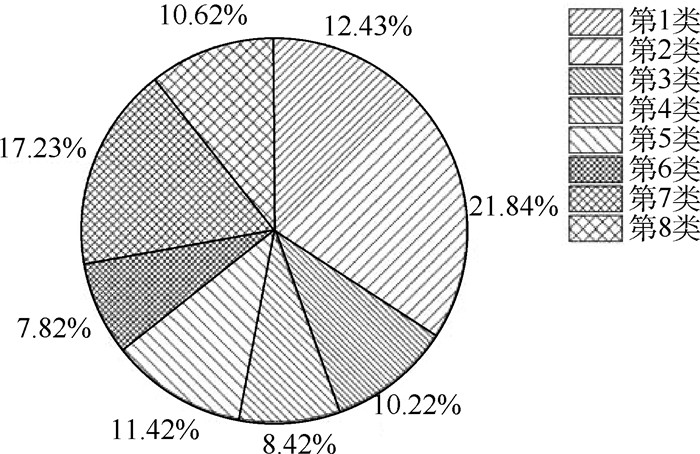
参数 统计量 参数值 第1类 第2类 第3类 第4类 第5类 第6类 第7类 第8类 总计 天气类型 数量 晴或多云 30 77 49 40 55 36 69 0 356 阴天 14 18 0 0 2 3 12 24 73 雨天等恶劣天气 18 14 2 2 0 0 5 29 70 光照条件 数量 日间 14 70 49 35 26 39 36 50 319 夜晚有路灯照明 44 23 0 2 21 0 50 1 141 夜晚无路灯照明 4 16 2 5 10 0 0 2 39 路口类型 数量 十字路口 62 0 51 42 57 39 86 53 390 丁字路口 0 109 0 0 0 0 0 0 109 信号灯类型 数量 直行+转弯信号 42 24 15 0 29 0 49 12 171 仅有直行信号 16 18 14 0 20 23 34 17 142 没有信号灯 4 67 22 42 8 16 3 24 186 撞人方运动类型 数量 直行 61 88 51 41 22 37 84 47 431 左转 0 16 0 0 29 2 1 5 53 右转 1 5 0 1 6 0 1 1 15 撞人方车型 数量 乘用车 56 85 45 42 28 31 83 48 418 商用车 6 24 6 0 29 8 3 5 81 两轮车 0 0 0 0 0 0 0 0 0 被撞方运动类型 数量 直行 5 47 47 41 55 1 81 49 326 左转 56 52 3 0 2 35 4 4 156 右转 1 10 1 1 0 3 1 0 17 被撞方车型 数量 乘用车 58 56 0 42 35 36 68 34 329 商用车 4 23 22 0 12 2 14 12 89 两轮车 0 30 29 0 10 1 4 7 81 每类总计 数量 62 109 51 42 57 39 86 53 499 占比/% 12.43 21.84 10.22 8.42 11.42 7.82 17.23 10.62 100.00
下载: 导出CSV
表 9 AEB路口测试场景
Table 9. Intersection test scenarios for AEB
场景类型 第1类 第2类 第3类 第4类 第5类 第6类 第7类 第8类 天气类型 晴或多云 晴或多云 晴或多云 晴或多云 晴或多云 晴或多云 晴或多云 雨天 光照条件 夜间有路灯照明 日间 日间 日间 日间 日间 夜间有路灯照明 日间 路口类型 十字路口 丁字路口 十字路口 十字路口 十字路口 十字路口 十字路口 十字路口 信号灯类型 直行+转弯
信号没有信号灯 没有信号灯 没有信号灯 直行+转弯
信号仅有直行
信号直行+转弯
信号没有信号灯 测试车运动类型 直行 直行 直行 直行 左转 直行 直行 直行 测试车速度/
(km·h-1)45 50 55 55 40 50 50 40 测试车车型 乘用车 乘用车 乘用车 乘用车 商用车 乘用车 乘用车 乘用车 目标车运动类型 左转 左转 直行 直行 直行 左转 直行 直行 目标车速度/
(km·h-1)25 20 30 40 40 25 40 35 目标车车型 乘用车 乘用车 两轮车 乘用车 乘用车 乘用车 乘用车 乘用车 图示 






 下载: 导出CSV
下载: 导出CSV
-
[1] 公安部交通管理局.中华人民共和国道路交通事故统计年报(2017年度)[R].北京: 公安部交通管理局, 2018.Traffic Management Bureau of Ministry of Public Security.Annual report on road traffic accidents of People's Republic of China(2017)[R].Beijing: Traffic Management Bureau of Ministry of Public Security, 2018(in Chinese). [2] 李霖, 朱西产, 董小飞, 等.自主紧急制动系统避撞策略的研究[J].汽车工程, 2015, 37(2):168-174. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcgc201502008LI L, ZHU X C, DONG X F, et al.A research on the collision avoidance strategy for autonomous emergency braking system[J].Automotive Engineering, 2015, 37(2):168-174(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcgc201502008 [3] Euro-NCAP.AEB test protocol v1.1[EB/OL].[2019-07-09].https://www.euroncap.com/en/for-engineers/protocols/safety-assist/. [4] 余卓平, 邢星宇, 陈君毅.自动驾驶汽车测试技术与应用进展[J].同济大学学报(自然科学版), 2019, 47(4):540-547. http://www.cqvip.com/QK/90798X/20194/7001871957.htmlYU Z P, XING X Y, CHEN J Y.Review on automated vehicle testing technology and its application[J].Journal of Tongji University(Natural Science), 2019, 47(4):540-547(in Chinese). http://www.cqvip.com/QK/90798X/20194/7001871957.html [5] ULBRICH S, MENZEL T, RESCHKA A, et al.Defining and substantiating the terms scene, situation, and scenario for automated driving[C]//2015 IEEE 18th International Conference on Intelligent Transportation Systems.Piscataway: IEEE Press, 2015: 982-988. [6] 朱冰, 张培兴, 赵健, 等.基于场景的自动驾驶汽车虚拟测试研究进展[J].中国公路学报, 2019, 32(6):1-19. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgglxb201906001ZHU B, ZHANG P X, ZHAO J, et al.Review of scenario-based virtual validation methods for automated vehicles[J].China Journal of Highway and Transport, 2019, 32(6):1-19(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgglxb201906001 [7] 孙勇, 郭魁元, 高明秋.自主紧急制动系统在新车评价规程中的现状与发展[J].汽车技术, 2016(2):1-6. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcjs201602001SUN Y, GUO K Y, GAO M Q.Status and development of autonomous emergency braking system for NCAP[J].Automobile Technology, 2016(2):1-6(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcjs201602001 [8] NITSCHE P, THOMAS P, STUETZ R, et al.Pre-crash scenarios at road junctions:A clustering method for car crash data[J].Accident Analysis & Prevention, 2017, 107:137-151. http://europepmc.org/abstract/MED/28841448 [9] SANDER U, LUBBE N.The potential of clustering methods to define intersection test scenarios:Assessing real-life performance of AEB[J].Accident Analysis & Prevention, 2018, 113:1-11. http://smartsearch.nstl.gov.cn/paper_detail.html?id=b0124e18914de5b1de2646482c407aba [10] DUAN J L, LI R, HOU L, et al.Driver braking behavior analysis to improve autonomous emergency braking systems in typical Chinese vehicle-bicycle conflicts[J].Accident Analysis & Prevention, 2017, 108:74-82. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b5bfc716be6bab064e089b85356393f9 [11] HOU L, DUAN J L, WANG W, et al.Drivers' braking behaviors in different motion patterns of vehicle-bicycle conflicts[J].Journal of Advanced Transportation, 2019, 2019:1-17. http://www.researchgate.net/publication/320475566_DRIVERS'_BRAKING_BEHAVIORS_IN_DIFFERENT_MOTION_PATTERNS_OF_VEHICLE-BICYCLE_CONFLICTS [12] SUI B, LUBBE N, BÄRGMAN J.A clustering approach to developing car-to-two-wheeler test scenarios for the assessment of automated emergency braking in China using in-depth Chinese crash data[J].Accident Analysis & Prevention, 2019, 132:105242. http://www.researchgate.net/publication/335378006_A_clustering_approach_to_developing_car-to-two-wheeler_test_scenarios_for_the_assessment_of_Automated_Emergency_Braking_in_China_using_in-depth_Chinese_crash_data [13] CAO Y, XIAO L Y, DONG H L, et al.Typical pre-crash scenarios reconstruction for two-wheelers and passenger vehicles and its application in parameter optimization of AEB system based on NAIS database[C]//Proceedings of the 26th International Technical Conference on the Enhanced Safety of Vehicles(ESV), 2019: 1339-1353. [14] 胡林, 易平, 黄晶, 等.基于真实事故案例的自动紧急制动系统两轮车测试场景研究[J].汽车工程, 2018, 40(12):1435-1446. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcgc201812009HU L, YI P, HUANG J, et al.A research on test scenes of two-wheeled vehicles for automatic emergency system based on real accident cases[J].Automotive Engineering, 2018, 40(12):1435-1446(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcgc201812009 [15] 范天赐, 王宏雁, 杨震, 等.基于中国两轮车事故的典型场景提取与分析[J].交通与运输, 2019, 35(2):41-45. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jtyys201902010FAN T C, WANG H Y, YANG Z, et al.Typical two-wheelers accident scenarios extraction and analysis based on Chinese road traffic data[J].Traffic & Transportation, 2019, 35(2):41-45(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jtyys201902010 [16] 苏江平, 陈君毅, 王宏雁, 等.基于中国危险工况的行人交通冲突典型场景提取与分析[J].交通与运输(学术版), 2017(1):209-214. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jtyys2017z1049SU J P, CHEN J Y, WANG H Y, et al.Establishment and analysis on typical road traffic near-crash scenarios related to pedestrian in China[J].Traffic & Transportation, 2017(1):209-214(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jtyys2017z1049 [17] 夏澜, 朱西产, 马志雄.切入型危险工况下自动紧急制动系统的测试场景[C]//第十四届国际汽车交通安全学术会议, 2017: 184-197.XIA L, ZHU X C, MA Z X.AEB test scenarios under cut-in dangerous conditions[C]//Proceedings of the 14th International Forum of Automotive Traffic Safety, 2017: 184-197(in Chinese). [18] 刘颖, 贺锦鹏, 刘卫国, 等.自动紧急制动系统行人测试场景的研究[J].汽车技术, 2014(3):35-39. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcjs201403009LIU Y, HE J P, LIU W G, et al.Research on test scenarios for AEB pedestrian system[J].Automobile Technology, 2014(3):35-39(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcjs201403009 [19] 胡林, 方胜勇, 黄晶, 等.基于逻辑回归的二轮车-汽车碰撞事故深度分析[J].汽车工程, 2016, 38(11):1288-1293. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcgc201611002HU L, FANG S Y, HUANG J, et al.In-depth analysis on cycle-vehicle crash accident based on logistic regression[J].Automotive Engineering, 2016, 38(11):1288-1293(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcgc201611002 [20] 刘晨.基于NAIS的交通伤严重程度影响因素研究[D].北京: 清华大学, 2015.LIU C.Study of influencing factors on traffic injury severity based on the NAIS[D].Beijing: Tsinghua University, 2015(in Chinese). [21] 何仁, 冯海鹏.自动紧急制动(AEB)技术的研究与进展[J].汽车安全与节能学报, 2019, 10(1):1-15. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcaqyjn201901001HE R, FENG H P.Research and development of autonomous emergency brake(AEB) technology[J].Journal of Automotive Safety and Energy, 2019, 10(1):1-15(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=qcaqyjn201901001 [22] 朱建平.应用多元统计分析[M].3版.北京:科学出版社, 2016.ZHU J P.Applied multivariate statistical analysis[M].3rd ed.Beijing:Science Press, 2016(in Chinese). [23] 李卫东.应用多元统计分析[M].2版.北京:北京大学出版社, 2015.LI W D.Applied multivariate statistical analysis[M].2nd ed.Beijing:Peking University Press, 2015(in Chinese). [24] 克劳斯·巴克豪斯, 本德·埃里克森, 伍尔夫·普林克, 等.多元统计分析方法:用SPSS工具[M].上海:格致出版社, 2009.BACKHAUS K, ERICHSON B, PLINKE W, et al.Multivariate statistical analysis method:Using SPSS tools[M].Shanghai:Gezhi Press, 2009(in Chinese). [25] Euro-NCAP.AEB car-to-car test protocol v3.0.2[EB/OL].[2019-09-19].https://www.euroncap.com/en/for-engineers/protocols/safety-assist/. -

 下载:
下载:




 点击查看大图
点击查看大图
计量
- 文章访问数: 925
- HTML全文浏览量: 171
- PDF下载量: 291
- 被引次数: 0
