



Measurement method of ship's heave motion information based on IMU and UKF algorithm
-
摘要:
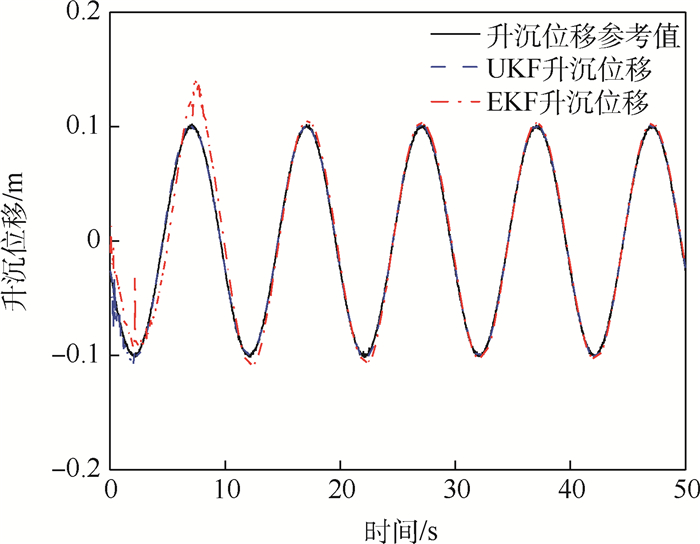
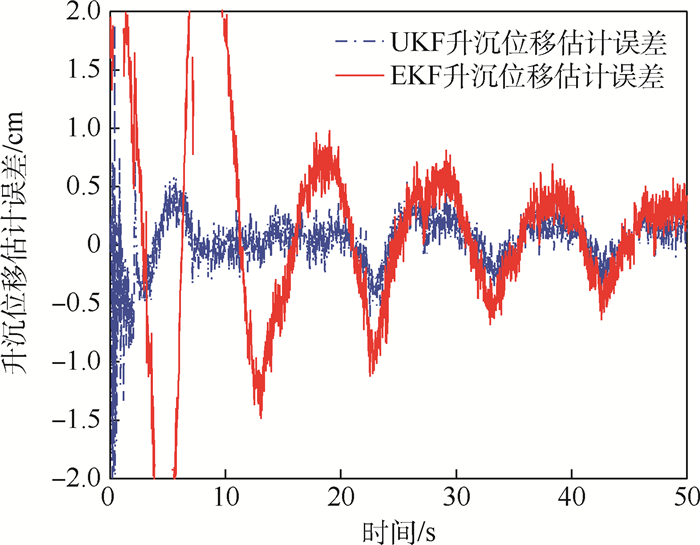
为获取实时、精确的船舶升沉运动信息,根据船舶升沉运动模型和频谱分析方法,建立描述惯性测量单元(IMU)的加速度测量信息与船舶升沉运动状态量关系的解析模型。基于无迹卡尔曼滤波(UKF)算法非线性滤波的特点,进行升沉运动滤波解算。通过仿真分析证明了所提方法在船舶升沉运动测量中的有效性。利用三自由度平台升沉运动测量实验验证,结果表明,同一模型下,相比于扩展卡尔曼滤波(EKF)算法的解算结果,所提方法具有更快的收敛速度和更高的测量精度;对船舶升沉位移的估计精度达到最大升沉幅值的5%,可以得到精确、无时延的船舶升沉运动信息。
-
关键词:
- 升沉测量 /
- 惯性测量单元(IMU) /
- 无迹卡尔曼滤波(UKF) /
- 频谱分析 /
- 平台实验
Abstract:To obtain accurate estimation of ship heave motion information in real time, according to the ship heave kinematics model and spectral analysis method, an analytical model describing the relationship between the acceleration measurement information of the Inertial Measurement Unit (IMU) and the ship heave motion state quantity was established. Based on the characteristics of Unscented Kalman Filter (UKF) nonlinear filtering algorithm, the heave motion filtering solution is performed. Simulation analysis proves the effectiveness of the proposed algorithm in ship heave motion measurement. The experimental verification of the three-degree-of-freedom platform heave motion measurement is performed. The experimental results show that, compared with the solution of the Extended Kalman Filter (EKF) method, the algorithm in this paper has faster convergence speed and higher measurement accuracy; the estimation accuracy of the ship's heave displacement reaches 5% of the maximum heave amplitude, and accurate and no-delay ship heave motion information can be obtained.
-

图 6 升沉加速度零偏估计仿真结果
Figure 6. Simulation results of zero bias estimation of heave acceleration
-
[1] RICHTER M, SCHNEIDER K, WALSER D, et al. Real-time heave motion estimation using adaptive filtering techniques[J]. IFAC Proceedings Volumes, 2014, 47(3): 10119-10125. doi: 10.3182/20140824-6-ZA-1003.00111 [2] 黄卫权, 李智超, 卢曼曼. 基于BMFLC算法的船舶升沉测量方法[J]. 系统工程与电子术, 2017, 39(12): 159-164.HUANG W Q, LI Z C, LU M M. Method of measurement for ship heave motion based on BMFLC algorithm[J]. Systems Engineering and Electronics, 2017, 39(12): 159-164(in Chinese). [3] 孙伟, 孙枫. 基于惯导解算的舰船升沉测量技术[J]. 仪器仪表学报, 2012, 33(1): 162-172. https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201201025.htmSUN W, SUN F. Measurement technology of ship heave movement based on SINS resolving[J]. Chinese Journal of Scientific Instrument, 2012, 33(1): 162-172(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201201025.htm [4] 刘星伯. 基于捷联航姿系统的舰船瞬时线运动信息测量研究[D]. 哈尔滨: 哈尔滨工程大学, 2009.LIU X B. Study on the measuring of the instaneous movements of the ships based on SINS[D]. Harbin: Harbin Engineering University, 2009(in Chinese). [5] 秦永元. 卡尔曼滤波与组合导航原理[M]. 3版. 西安: 西北工业大学出版社, 2015: 199-220.QIN Y Y. Kalman filtering and integrated navigation principle[M]. 3rd ed. Xi'an: Northwestern Polytechnical University Press, 2015: 199-220(in Chinese). [6] JULIER S J, UHLMANN J K, DURRANT-WHYTE H F. A new approach for filtering nonlinear systems[C]//American Control Conference, 1995: 1628-1632. [7] JULIER S J. Unscented filtering and nonlinear estimation[J]. Proceedings of the IEEE, 2004, 92(3): 401-422. doi: 10.1109/JPROC.2003.823141 [8] GODHAVN J M. High quality heave measurements based on GPS RTK and accelerometer technology[C]//OCEANS 2000 MTS/IEEE Conference and Exhibition. Piscataway: IEEE Press, 2000: 309-314. [9] HU Y P, TAO L M. Real-time zero phase filtering for heave measurement[C]//The 11th IEEE International Conference on Electronic Measurement & Instruments. Piscataway: IEEE Press, 2013: 321-326. [10] 严恭敏, 苏幸君, 翁浚, 等. 基于惯导和无时延滤波器的船舶升沉测量[J]. 导航定位学报, 2016, 4(2): 91-93. https://www.cnki.com.cn/Article/CJFDTOTAL-CHWZ201602019.htmYAN G M, SU X J, WENG J, et al. Measurement of ship's heave motion based on INS and zero-phase-delay digital filter[J]. Journal of Navigation and Positioning, 2016, 4(2): 91-93(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CHWZ201602019.htm [11] 袁书明, 程建华, 马斌. 基于自适应频率估计的船舶瞬时线运动测量方法[J]. 中国惯性技术学报, 2016, 24(5): 565-570. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201605002.htmYUAN S M, CHENG J H, MA B. Measurement method for ship instantaneous linear movement based on adaptive frequency estimation[J]. Journal of Chinese Inertial Technology, 2016, 24(5): 565-570(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201605002.htm [12] KVCHLER S, EBERHARTER J K, LANGER K, et al. Heave motion estimation of a vessel using acceleration measurements[J]. IFAC Proceedings Volumes, 2011, 44(1): 14742-14747. doi: 10.3182/20110828-6-IT-1002.01935 [13] 刘婉婷. 船舶升沉运动预报研究[D]. 大连: 大连海事大学, 2016.LIU W T. Study on heave motion prediction of ships[D]. Dalian: Dalian Maritime University, 2016(in Chinese). [14] 李智超. 基于惯导系统的舰船升沉测量技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2018.LI Z C. Research on ship heave measurement technology based on inertial navigation system[D]. Harbin: Harbin Engineering University, 2018(in Chinese). [15] 严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019: 222-224.YAN G M, WENG J. Strapdown inertial navigation algorithm and integrated navigation principle[M]. Xi'an: Northwestern Polytechnical University Press, 2019: 222-224(in Chinese). [16] 刘萍. 基于MEMS的高精度姿态检测系统设计[D]. 哈尔滨: 哈尔滨工程大学, 2016: 11-21.LIU P. Design of high precision attitude detection system based on MEMS[D]. Harbin: Harbin Engineering University, 2016: 11-21(in Chinese). [17] 袁赣南, 张涛. 四元数UKF超紧密组合导航滤波方法[J]. 北京航空航天大学学报, 2010, 36(7): 762-766. https://bhxb.buaa.edu.cn/CN/abstract/abstract8434.shtmlYUAN G N, ZHANG T. Quaternion unscented Kalman filtering for ultra-tight integration[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(7): 762-766(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract8434.shtml -

 下载:
下载:









 点击查看大图
点击查看大图
计量
- 文章访问数: 826
- HTML全文浏览量: 151
- PDF下载量: 95
- 被引次数: 0
