



-
摘要:
针对高速公路上车辆行驶速度快,换道行为危险程度高的问题,聚焦于不可避免、发生频繁、一旦发生事故后果严重的强制换道行为,改进基于门控循环单元(GRU)的换道模型,对强制换道行为进行分析与预测。为保证模型的有效性,选取下一代仿真技术(NGSIM)数据作为模型的训练集与检测集,使用侧向加速度将车辆侧向摆动数据有效删除并得到强制换道的最迟换道点,进而实现车辆位置与换道决策的预测。实验结果证明,所提模型能够以96.01%的准确率判定车辆在最迟换道点的强制换道行为,相较于LSTM模型准确率提升了3.67%,同时相较于朴素贝叶斯网络准确率提高了7.31%。
-
关键词:
- 强制换道行为 /
- 神经网络 /
- 换道决策 /
- 侧向加速度 /
- 门控循环单元(GRU)
Abstract:Aiming at the problem of fast-speed and high risk of lane changing behavior on expressway, we focus on the ineviteable, freguent and serve mandatory lane-changing behaviors to improve the lane-changing model based on gated recurrent unit (GRU), and predict the decision-making behaviors of mandatony lane-changing. To verify the effectiveness of the model, adopt the next generation simulation (NGSIM) data as the training set and test set of the model. From this data, the lateral acceleration threshold is obtained to screen out the phenomenon of lateral swing of vehicles. The experimental results indicate that the optimized model could determine the location of mandatory lane change with an accuracy of 96.01%. The accuracy of the model is improved by 3.67% compared with the LSTM model, and is improved by 7.31% compared with the naive Bayes network.
-

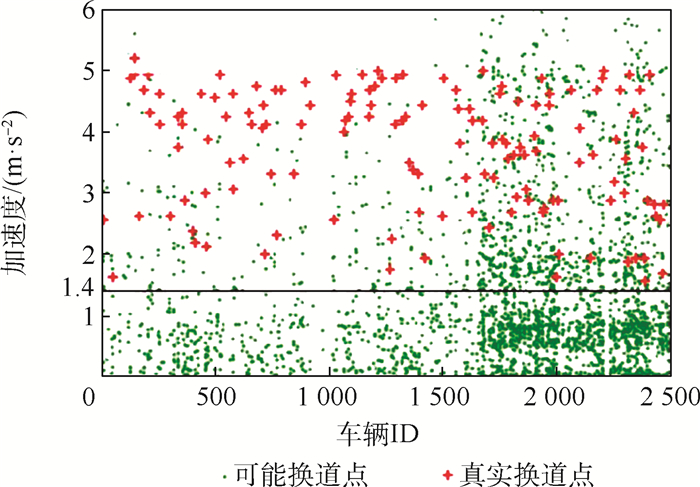
图 10 全部车辆可能换道点与真实换道点比较
Figure 10. Comparison between possible and real lane change points of all vehicles

图 12 当前车辆与相邻车道前后车辆间的关系
Figure 12. Relationship among present vehicle and front and back vehicle on adjacent lane

图 13 隐藏层层数与神经元个数对模型的影响
Figure 13. Effect of the number of hidden layers and neurons on model
表 1 NGSIM数据(部分)
Table 1. NGSIM data (partial)
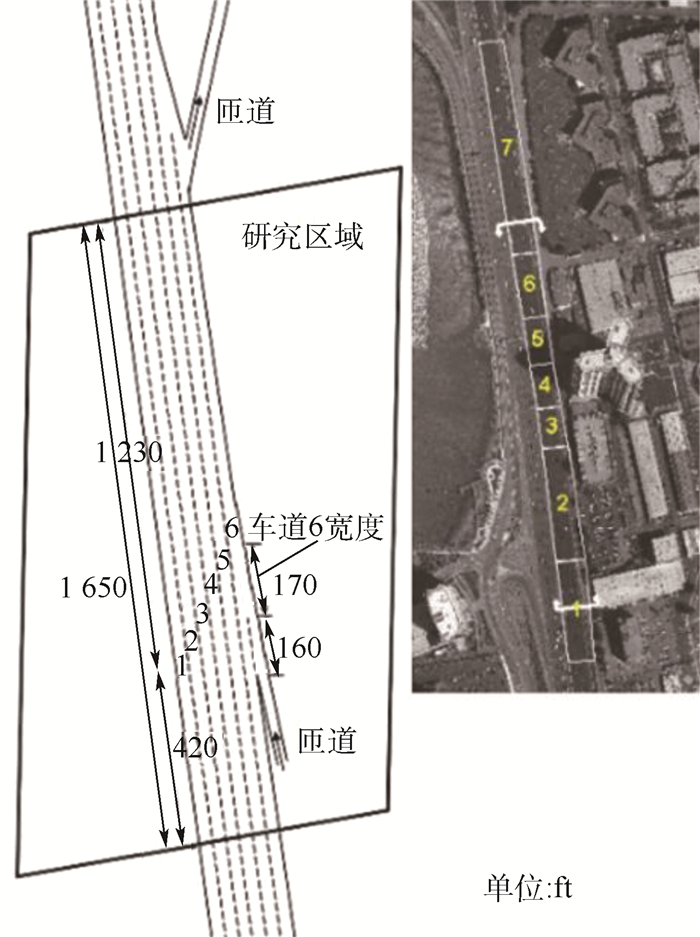
名称 描述 单位 转换后单位 车辆ID 被检测车辆的序号 时间 统一的车辆被检测的时间 0.1 s 0.1 s X位置坐标 被检测车辆与道路左侧的距离 ft m Y位置坐标 被检测车辆与检测路段起点的距离 ft m 车辆类别 车辆按大小/型号进行的分类 车辆速度 车辆瞬时速度 ft/s m/s 车头间距 2辆连续行驶的车辆车头间的距离 ft m 注:1 ft(英尺)=0.304 8 m。  下载: 导出CSV
下载: 导出CSV
表 2 强制换道车辆数据(部分)
Table 2. Mandatory lane change vehicle data (partial)
车辆ID 时间戳 X位置坐标/m Y位置坐标/m 车辆速度/(m·s-1) 车辆加速度/(m·s-2) 车道序号 5 1113433148400 68.874 65.907 21.55 0 6 5 1113433148500 68.875 68.076 21.55 0 6 5 1113433150300 67.414 108.23 24.83 -0.7 6 ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ 2 911 1113433959100 74.76 679.233 15.91 -0.16 6 2 911 1113433959200 74.665 680.823 15.88 0.02 6
下载: 导出CSV
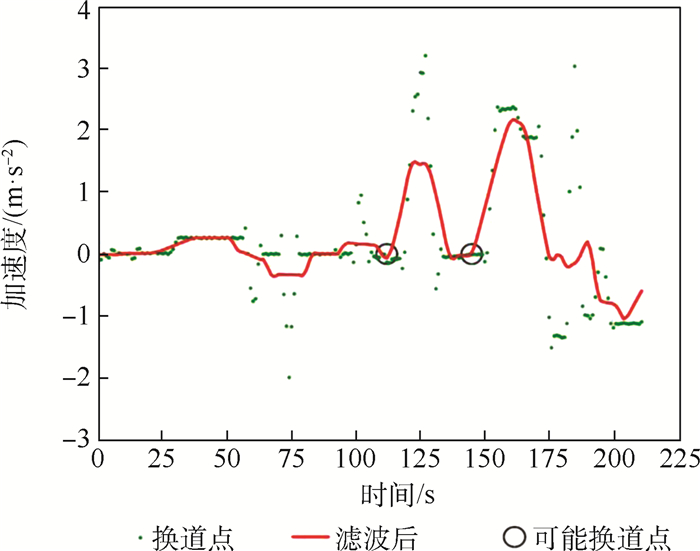
表 3 车辆5的强制换道数据
Table 3. Mandatory lane change data of vehicle 5
车辆ID X位置坐标/m Y位置坐标/m 车辆速度/(m·s-1) 车辆加速度/(m·s-2) 车道序号 1 69.557 303.541 7.08 -1.19 6 2 69.547 305.518 20.16 -0.1 6 ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ 211 74.423 697.387 19.55 -1.09 7 212 74.314 699.343 19.52 -0.43 7
下载: 导出CSV
表 4 不同学习率的MAE对比
Table 4. Comparison of MAE with different learning rates
学习率 MAE 0.1 2.673 574 441 2 0.01 0.086 840 446 7 0.001 0.061 312 660 5 0.000 1 1.105 762 974 3
下载: 导出CSV
表 5 强制换道决策模型预测结果
Table 5. Prediction result of mandatory lane change decision-making model
车辆ID X位置坐标/m Y位置坐标/m 车辆速度/(m·s-1) 侧向加速度/(m·s-2) 真实换道情况 预测换道情况(bool) 5 76.331 661.762 22.09 1.67 1 True ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ 186 76.329 664.643 18.86 1.63 1 True ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋮ 2 911 74.886 664.511 16.09 1.75 1 True 2 911 74.76 679.233 15.91 -0.16 0 False 2 911 74.665 680.823 15.88 0.02 0 False
下载: 导出CSV
-
[1] WOLFRAM S. Theory and application of cellular automata[M]. Singapore: World Scientific, 1986. [2] NAGEL K, SCHRECKENBERG M. A cellular automaton model for freeway traffic[J]. Journal De Physique I, 1992, 2(12): 2221-2229. doi: 10.1051/jp2:1992262 [3] CHOWDHURY D, WOLF D E, SCHRECKENBERG M. Particle hopping models for two-lane traffic with two kinds of vehicles: Effects of lane-changing rules[J]. Physics A: Statistical Mechanics and its Applications, 1997, 235(3): 417-439. [4] GIPPS P G. A model for the structure of lane-changing decisions[J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414. doi: 10.1016/0191-2615(86)90012-3 [5] LEE G. Modeling gap acceptance at freeway merges[D]. Cambridge: MIT, 2006. [6] HIDAS P. Modeling lane changing and merging in microscopic traffic simulation[J]. Transportation Research Part C: Emerging Technologies, 2002, 10(5): 351-371. [7] BOXILL S A, YU L. An evaluation of traffic simulation models for supporting ITS[D]. Houston: Texas Szouthern University, 2000. [8] TALEBPOUR A, MAHMASSANI H S, HAMDAR S H. Modeling lane-changing behavior in a connected environment: A game theory approach[J]. Transportation Research Procedia, 2015, 7: 420-440. doi: 10.1016/j.trpro.2015.06.022 [9] MENG F L, SU J Y, LIU C J, et al. Dynamic decision making in lane change: Game theory with receding horizon[C]//2016 UKACC 11th International Conference on Control. Piscataway: IEEE Press, 2016: 1-6. [10] NILSSON J, SJÖBERG J. Strategic decision making for automated driving on two-lane, one way roads using model predictive control[C]//2013 Intelligent Vehicles Symposium (IV). Piscataway: IEEE Press, 2013: 1253-1258. [11] WANG Y, ZHANG D, LIU Y, et al. Enhancing transportation systems via deep learning: A survey[J]. Transportation Research Part C: Emerging Technologies, 2019, 99: 144-163. doi: 10.1016/j.trc.2018.12.004 [12] DING C, WANG W, WANG X, et al. A neural network model for driver's lane-changing trajectory prediction in urban traffic flow[J]. Mathematical Problems in Engineering, 2013, 2013: 967358.1-967358.8. [13] LIU Y, WANG X, LI L, et al. A novel lane change decision-making model of autonomous vehicle based on support vector machine[J]. IEEE Access, 2019, 7: 26543-26550. doi: 10.1109/ACCESS.2019.2900416 [14] 邱小平, 刘亚龙, 马丽娜, 等. 基于贝叶斯网络的车辆换道模型[J]. 交通运输系统工程与信息, 2015, 15(5): 67-73. https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201505010.htmQIU X P, LIU Y L, MA L N, et al. Vehicle lane change model based on Bayesian network[J] Transportation Systems Engineering and Information, 2015, 15(5): 67-73(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YSXT201505010.htm [15] HUANG X, SUN J, SUN J. A car-following model considering asymmetric driving behavior based on long short-term memory neural networks[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 346-362. doi: 10.1016/j.trc.2018.07.022 [16] HOU Y, EDARA P, SUN C. Modeling mandatory lane changing using Bayes classifier and decision trees[J]. Intelligent Transportation Systems, 2014, 15(2): 647-655. [17] ZHENG J, SUZUKI K, FUJITA M. Predicting driver's lane-changing decisions using a neural network model[J]. Simulation Modelling Practice and Theory, 2014, 42: 73-83. doi: 10.1016/j.simpat.2013.12.007 [18] CHO K, VAN MERRIENBOER B, GULCEHRE C, et al. Learning phrase representations using RNN encoder-decoder for statistical machine translation[EB/OL]. (2014-09-03)[2020-11-01]. https://arxiv.org/ahs/1406.1078. [19] FU R, ZHANG Z, LI L. Using LSTM and GRU neural network methods for traffic flow prediction[C]//2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC). Piscataway: IEEE Press, 2016: 324-328. [20] XIE D F, FANG Z Z, JIA B, et al. A data-driven lane-changing model based on deep learning[J]. Transportation Research Part C: Emerging Technologies, 2019, 106: 41-60. doi: 10.1016/j.trc.2019.07.002 [21] 吴江玲, 张生瑞, AMIT K S, 等. 高速公路强制换道持续时间半参数生存分析[J]. 浙江大学学报(工学版), 2017, 51(11): 2215-2221. doi: 10.3785/j.issn.1008-973X.2017.11.016WU J L, ZHANG S R, AMIT K S, et al. Semi-parametric survival analysis of mandatory lane changing duration of freeways[J] Journal of Zhejiang University(Engineering Science), 2017, 51(11): 2215-2221(in Chinese). doi: 10.3785/j.issn.1008-973X.2017.11.016 -

 下载:
下载:





 点击查看大图
点击查看大图

计量
- 文章访问数: 526
- HTML全文浏览量: 188
- PDF下载量: 59
- 被引次数: 0
