



-
摘要:
车辆自动紧急制动(AEB)系统的应用存在大量误识别和不合理决策的挑战,在典型场景下开展测试,可以有效提高AEB的适用性。对国内外相关研究进行分析,从12类车辆与二轮车预碰撞场景中提取AEB测试重点关注的2类涉及参与方转向的场景(场景S11和S12),建立2类典型场景下的Pre-scan模型和量化描述二轮车相对于车辆运动轨迹的数学模型,并对AEB的效用及改进方向进行定性和定量分析。结果表明:场景S11和S12中,二轮车在运动坐标系下的运动轨迹仅与车辆和二轮车速度比值相关;场景S11中,仅当车辆和二轮车速度比值取为(0.7888, +∞)时,二轮车能够进入车辆AEB触发域,将AEB视场角从60°增大到90°,可有效改善AEB触发效果,速度比值范围从(0.7888, +∞)增加至(0.2033, +∞);场景S12中,当二轮车和车辆速度比值取为(0, (∆
v +2.46)/9.64)时,车辆AEB具有较好的触发效果,将AEB触发宽度从1.5 m扩大至 2 m时,对AEB触发效果的改善幅度不大。研究成果可为AEB系统的改进优化提供技术支撑。Abstract:The application of autonomous emergency braking (AEB) is faced with challenges of misidentification and unreasonable decision. Testing under typical scenarios can effectively improve the applicability of AEB. Based on the analysis of relevant research literature, two typical scenarios (S11 and S12) involving participants turning that AEB test focuses on are extracted from 12 types of two-wheeler and vehicle pre-crash scenarios. Pre-scan model and mathematical model are established to conduct qualitative and quantitative analysis on the effectiveness and improvement direction of AEB under the typical scenarios. In scenario S11 and S12, the trajectory of the two-wheeler in the moving coordinate system is only related to the speed ratio between the vehicle and the two-wheeler. In scenario S11, only when the speed ratio of vehicle to two-wheeler is
$ \left( {0.788\;8, + \infty } \right) $ , the two-wheeler can enter the AEB triggering domain. By increasing the field of view from$ {60^\circ } $ to$ {90^\circ } $ , the AEB can be effectively improved, and the range of speed ratio increases from$ \left( {0.788\;8, + \infty } \right) $ to$ \left( {0.203\;3, + \infty } \right) $ . In scenario S12, when the speed ratio of two-wheeler to vehicle is$ (0,{{(\Delta v + 2.46)} \mathord{\left/ {\vphantom {{(\Delta v + 2.46)} {9.64}}} \right. } {9.64}}) $ , the AEB has a good triggering effect. When the triggering width of AEB is expanded from 1.5 m to 2 m, the AEB triggering effect is not greatly improved. The research methods and conclusions can provide technical support for AEB optimization. -
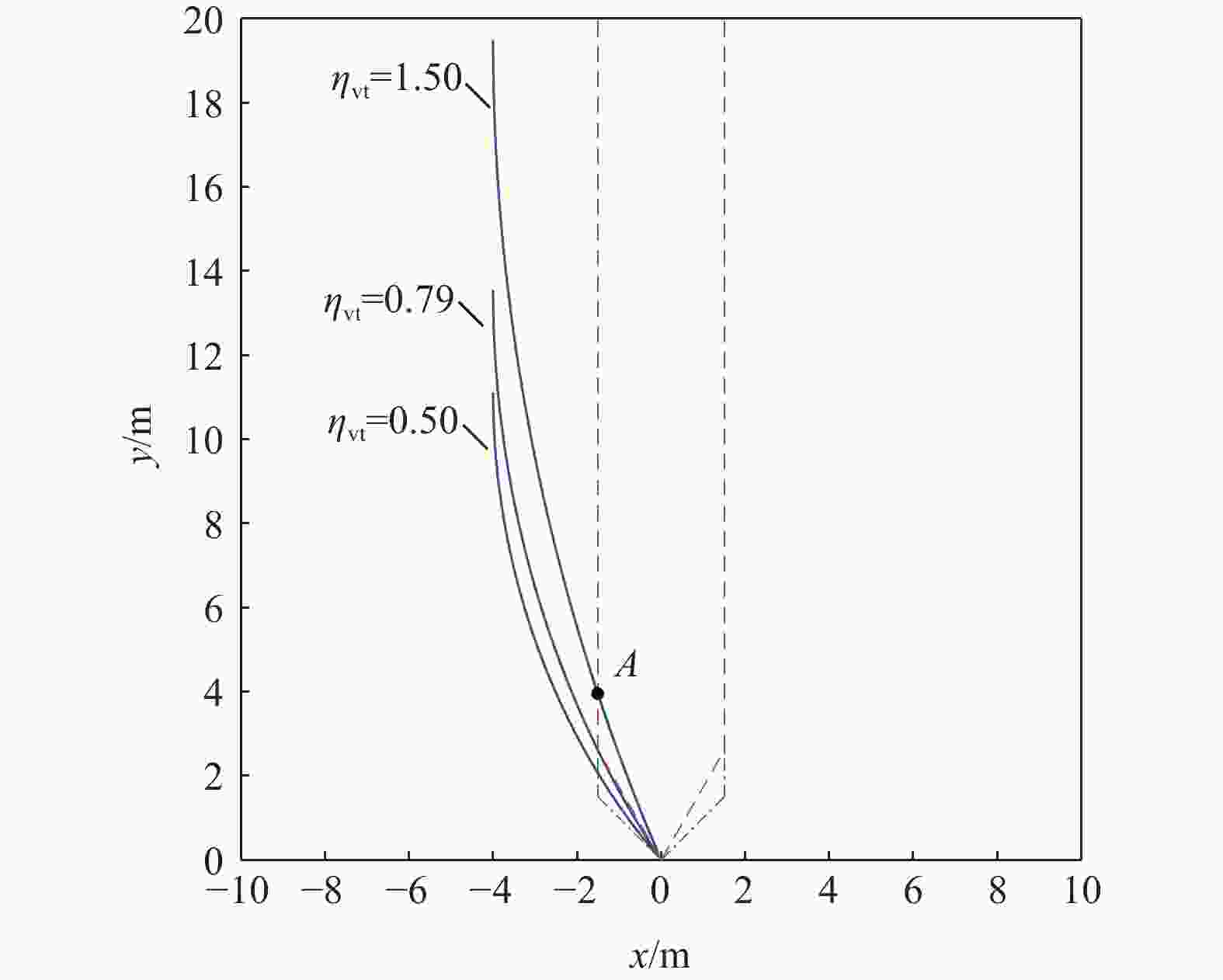
图 5 不同
$ {\eta _{{\text{vt}}}} $ 下场景S11参与方相对运动轨迹Figure 5. Relative participants trajectories of different
$ {\eta _{{\rm{vt}}}} $ in scenario S11
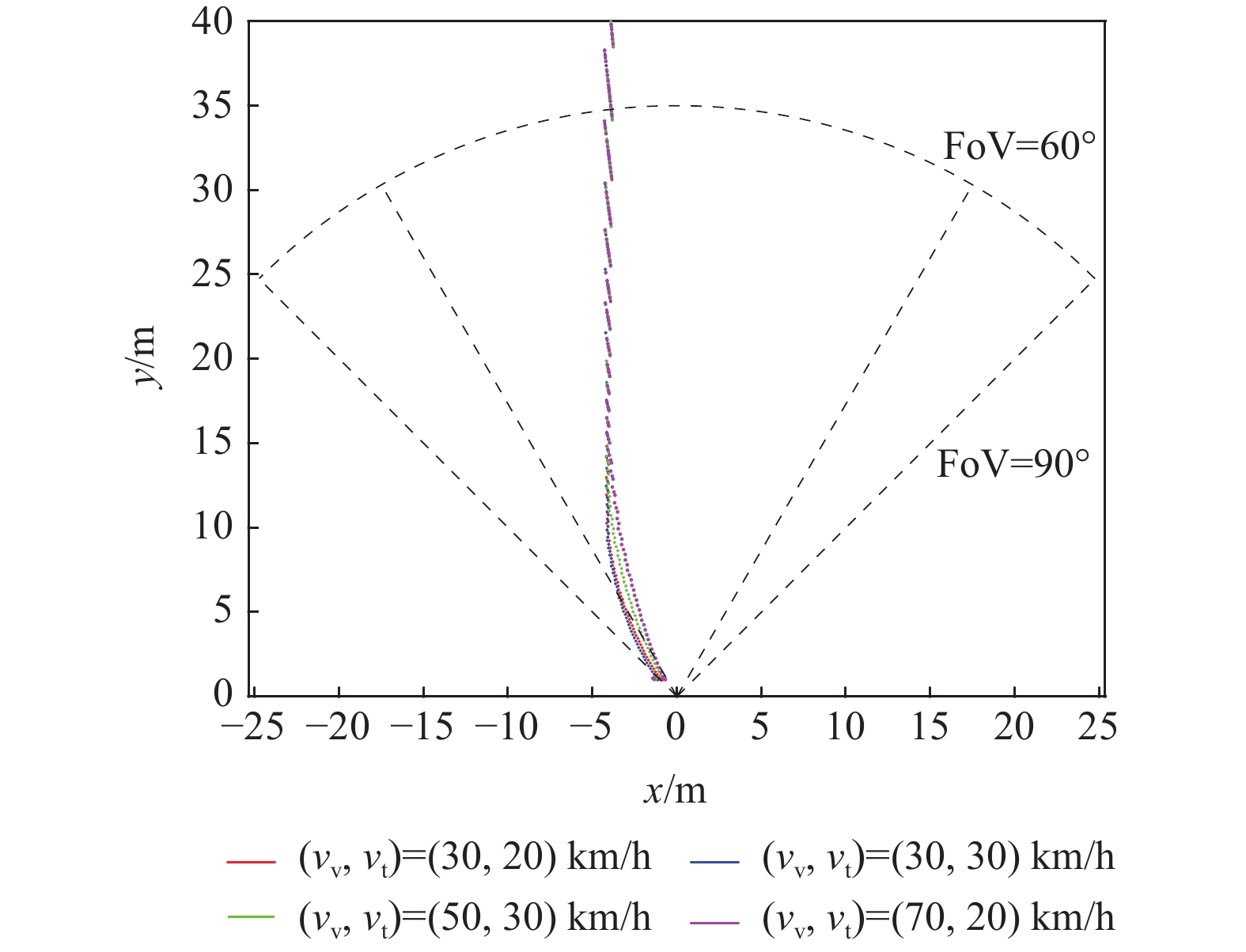
图 9 不同
$ {\rho _{{\text{tv}}}} $ 下场景S12参与方相对运动轨迹Figure 9. Relative participants trajectories of different
$ {\rho_{{\rm{tv}}}} $ in scenario S12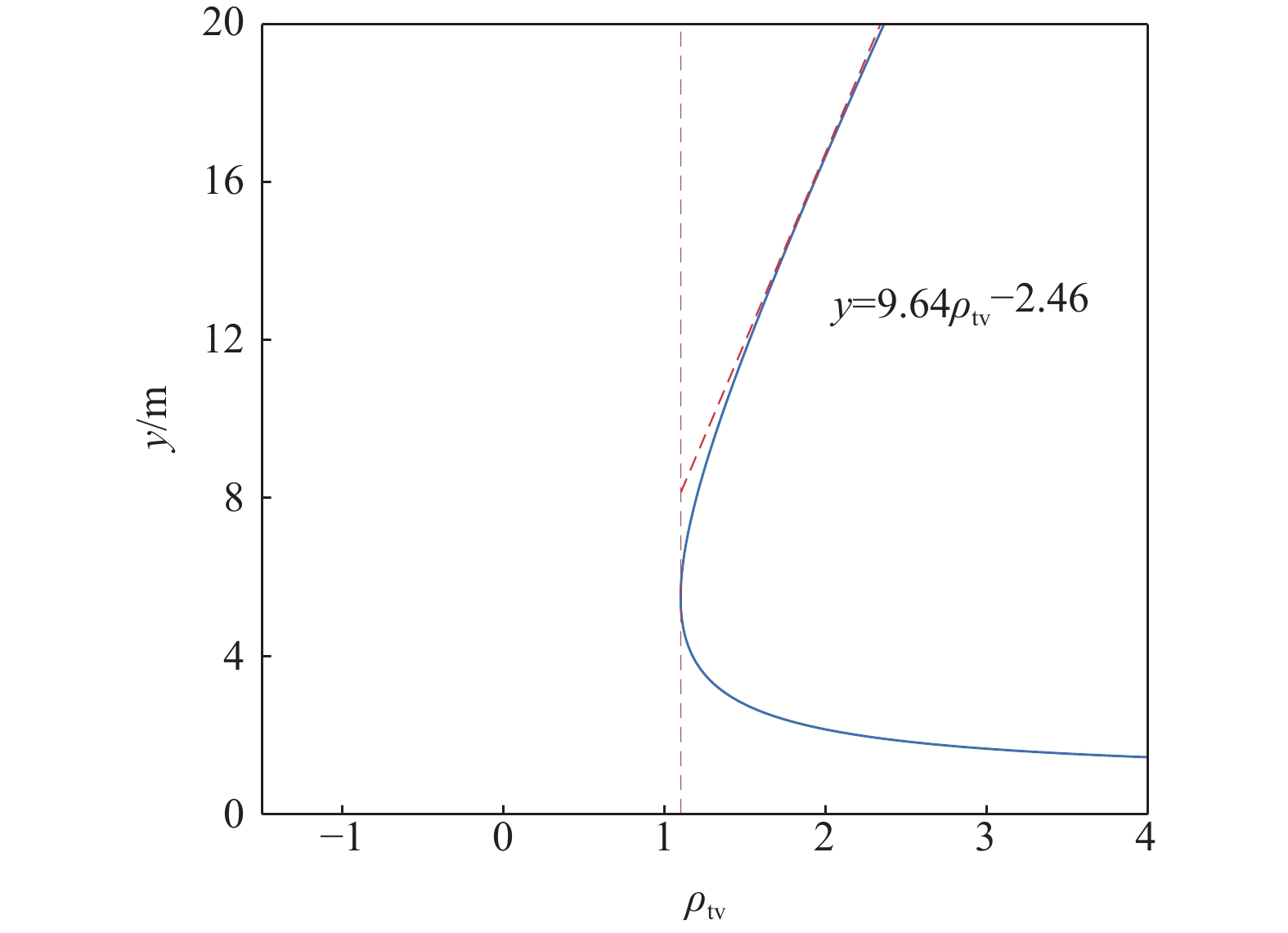
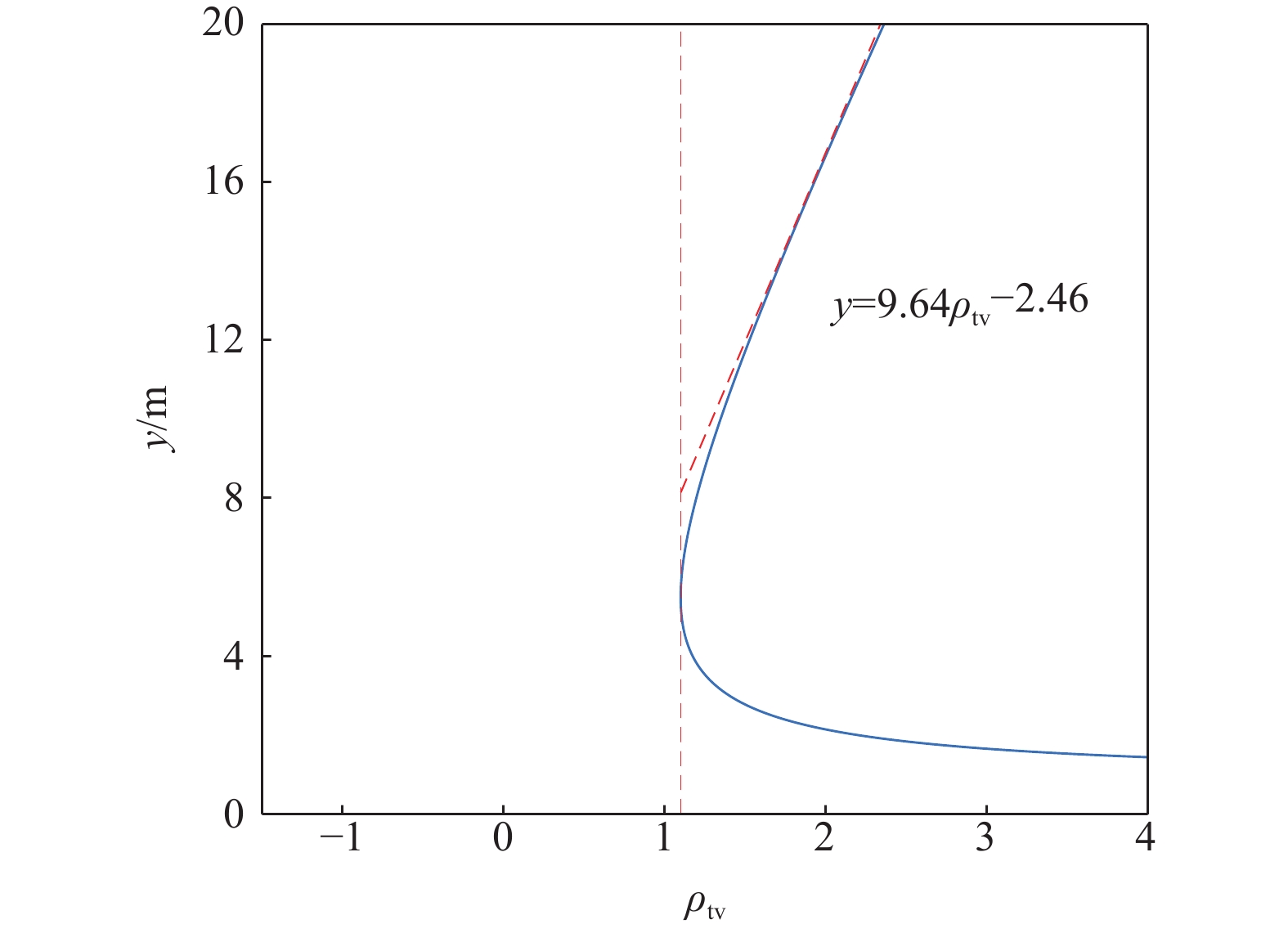
图 10 场景S12下
$ y $ 与$ {\rho _{{\text{tv}}}} $ 的关系Figure 10. Relationship between
$ y $ and$ {\rho _{{\rm{tv}}}} $ in scenario S12表 1 汽车与二轮车预碰撞场景
Table 1. Pre-crash scenario between vehicle and two-wheeler
场景类型 序号 场景描述 场景图示 相向运动 S11 在十字路口,车辆直行与对向左转二轮车发生碰撞 
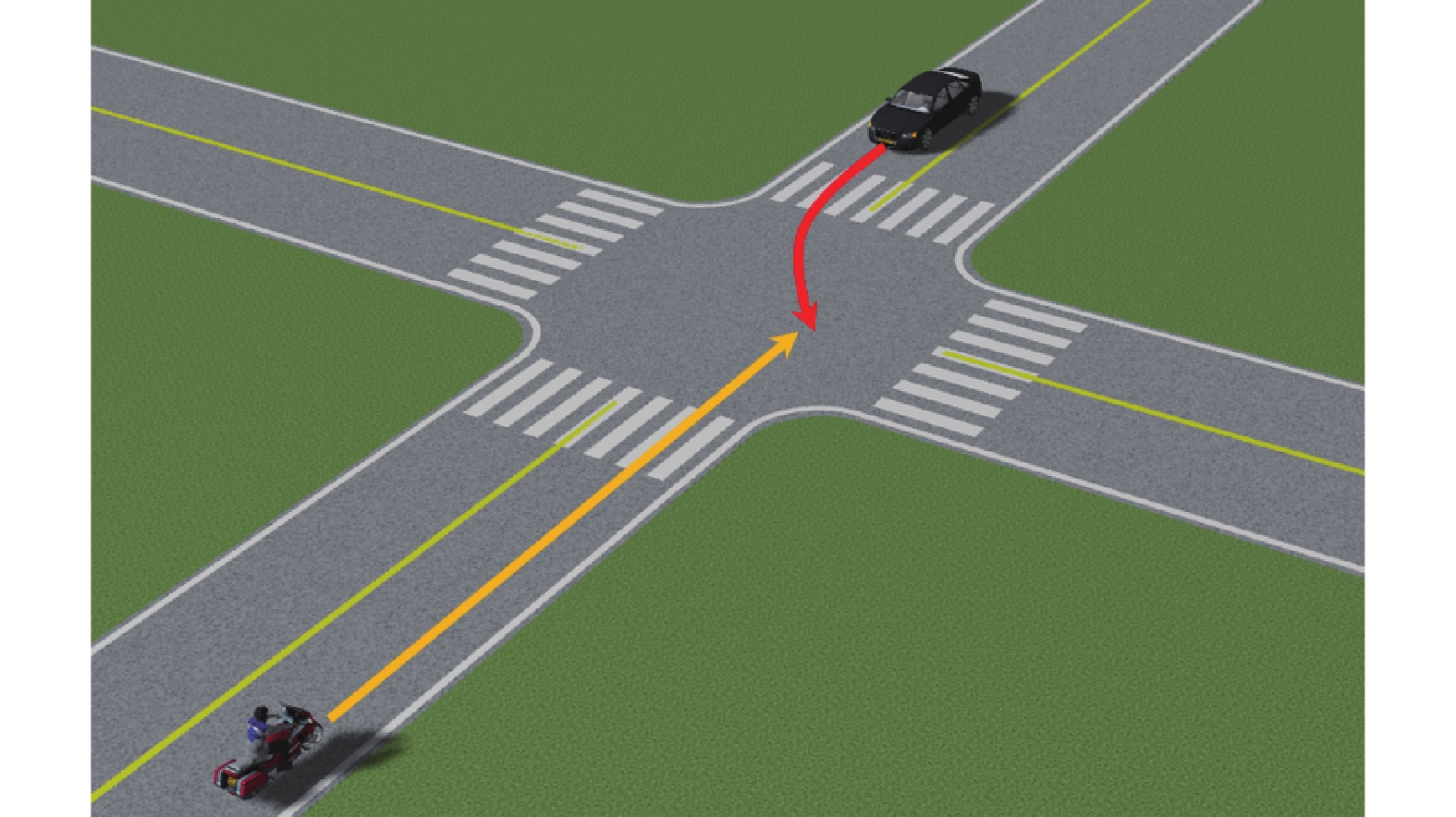
S12 在十字路口,车辆左转与对向直行二轮车发生碰撞 
S13 在直线路段,车辆向左变更车道与对向直行二轮车发生碰撞 
垂向运动 S21 在十字路口,车辆直行与从左侧出现直行二轮车发生碰撞 
S22 在十字路口,车辆直行与从右侧出现直行二轮车发生碰撞 
S23 在十字路口,车辆左转与从左侧出现直行二轮车发生碰撞 
S24 在十字路口,车辆左转与从右侧出现直行二轮车发生碰撞 
同向运动 S31 在直线路段,车辆直行与前方直行二轮车发生追尾碰撞 
S32 在十字路口,车辆直行与同向左转二轮车发生碰撞 
S33 在十字路口,车辆左转与同向直行二轮车发生碰撞 
S34 在十字路口,车辆右转与同向直行二轮车发生碰撞。 
S35 在十字路口,车辆左转调头与同向直行二轮车发生碰撞 
 下载: 导出CSV
下载: 导出CSV
表 2 典型AEB参数条件
Table 2. Typical AEB parameter conditions
参数 ${\rm{FoV} }$/(°) 触发宽度w/m 探测距离$ L/{\rm{m}} $ $ {{\rm{TTC}}}_{{\rm{max}}}/{\rm{s}} $ 数值 60 1.5 40 1
下载: 导出CSV
-
[1] FILDES B, KEALL M, BOS N, et al. Effectiveness of low speed autonomous emergency braking in real-world rear-end crashes[J]. Accident Analysis and Prevention, 2015, 81: 24-29. doi: 10.1016/j.aap.2015.03.029 [2] NHTSA. Manufacturers make progress on voluntary commitment to include automatic emergency braking on all new vehicles[EB/OL]. (2017-12-21)[2021-04-10].https://www.nhtsa.gov/press-releases/nhtsa-iihs-announcement-aeb. [3] 中国汽车技术研究中心有限公司. C-NCAP管理规则(2021年版)[S]. 天津: 中国汽车技术研究中心有限公司, 2020.China Automotive Technology & Research Center Company Limited. C-NCAP management regulation(2021)[S]. Tianjin: China Automotive Technology & Research Center Company Limited, 2020(in Chinese). [4] Euro NCAP. Test protocol AEB VRU systems[S]. [S.l.]: Euro NCAP, 2018. [5] Euro NCAP. Euro NCAP 2025 roadmap[S]. [S.l.]: Euro NCAP, 2018. [6] World Health Organization. Global status report on road safety 2018[R]. Geneve: World Health Organization, 2018. [7] 中华人民共和国公安部交通管理局. 中华人民共和国道路交通事故统计年报(2017年度)[R]. 北京: 中华人民共和国公安部交通管理局, 2018.Traffic Administration Bureau of the Ministry of Public Security of the People’s Republic of China. The People’s Republic of China road traffic accident annual statistic report (2017) [R]. Beijing: Traffic Administration Bureau of the Ministry of Public Security of the People’s Republic of China, 2018(in Chinese). [8] LIERS H. Analysis of the accident scenario of powered two-wheelers on the basis of real-world accidents[C]//Expert Symposium on Accident Research (ESAR), 2012: 101-115. [9] 李霖, 朱西产, 刘颖, 等. 涉及骑车人的典型交通危险场景[J]. 同济大学学报(自然科学版), 2013, 42(7): 1082-1087.LI L, ZHU X C, LIU Y, et al. Typical traffic risk scenarios relate to pedal cyclist[J]. Journal of Tongji University (Natural Science), 2013, 42(7): 1082-1087(in Chinese). [10] 徐向阳, 周兆辉, 胡文浩, 等. 基于事故数据挖掘的AEB路口测试场景[J]. 北京航空航天大学学报, 2020, 46 (10): 1817-1825.XU X Y, ZHOU Z H, HU W H, et al. Intersection test scenarios for AEB based on accident data mining[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46 (10): 1817-1825(in Chinese). [11] 胡林, 易平, 黄晶, 等. 基于真实事故案例的自动紧急制动系统两轮车测试场景研究[J]. 汽车工程, 2018, 40(12): 1435-1446.HU L, YI P, HUANG J, et al. A research on test scenes of two-wheeled vehicles for automatic emergency braking system based on real accident cases[J]. Automotive Engineering, 2018, 40(12): 1435-1446(in Chinese). [12] NITSCHE P, THOMAS P, STUETZ R, et al. Pre-crash scenarios at road junctions: A clustering method for car crash data[J]. Accident Analysis and Prevention, 2017, 107: 137-151. [13] SUI B, LUBBE N, BARGMAN J, et al. A clustering approach to developing car-to-two-wheeler test scenarios for the assessment of automated emergency braking in China using in-depth Chinese crash data[J]. Accident Analysis and Prevention, 2019, 132: 105242. [14] CAO Y, XIAO L Y, DONG H L, et al. Typical pre-crash scenarios reconstruction for two-wheelers and passenger vehicles and its application in parameter optimization of AEB system based on NAIS database[C]//Proceedings of the 26th International Technical Conference on the Enhanced Safety of Vehicles (ESV), 2019, 19: 0272. [15] HU W H, XU X Y, ZHOU Z H, et al. Mining and comparative analysis of typical pre-crash scenarios from IGLAD[J]. Accident Analysis and Prevention, 2020, 145: 105699. -






 下载:
下载:














 点击查看大图
点击查看大图

计量
- 文章访问数: 475
- HTML全文浏览量: 86
- PDF下载量: 84
- 被引次数: 0
