



-
摘要:
研究具有信息传输模型不确定性、随机时间延迟和数据丢包的网络化多传感器分布式融合估计问题。模型的不确定性刻画为系统矩阵中的非高斯非白噪声干扰,在远程处理中心处设置有限长度的存储空间用来存储各个传感器延迟到达的测量值。在最小方差原则下设计了一种利用测量值到达变量的最优常增益局部估计器,利用协方差交叉加权方法得到最优分布式融合估计器并推导得到使得估计器有界的条件。最后,通过某电源系统计算实例仿真验证所提融合估计器的有效性。
Abstract:Decentralized fusion estimation is investigated for a networked uncertain stochastic system with stochastic delays and dropouts. The uncertainty of the model is described by non-Gaussian non-white noise perturbations considered in the system matrix. Several finite memory buffers with different lengths are set at the processing center to save the delivered observations of the sensors. A locally optimal constant gain estimator is proposed by minimizing the mean square error accounting for the non-Gaussian disturbance of the system matrix, and by using the real time arrival information based on the received measurements. Then, a decentralized fusion estimator is obtained by using the CI weighting algorithm, and the conditions ensuring the boundness of the fusion estimation error are given. Finally, a simulation example is provided to verify the effectiveness of the proposed approach.
-

图 1 网络化分布式多传感器融合估计系统架构
Figure 1. Architecture of networked distributed multi-sensor fusion estimation system
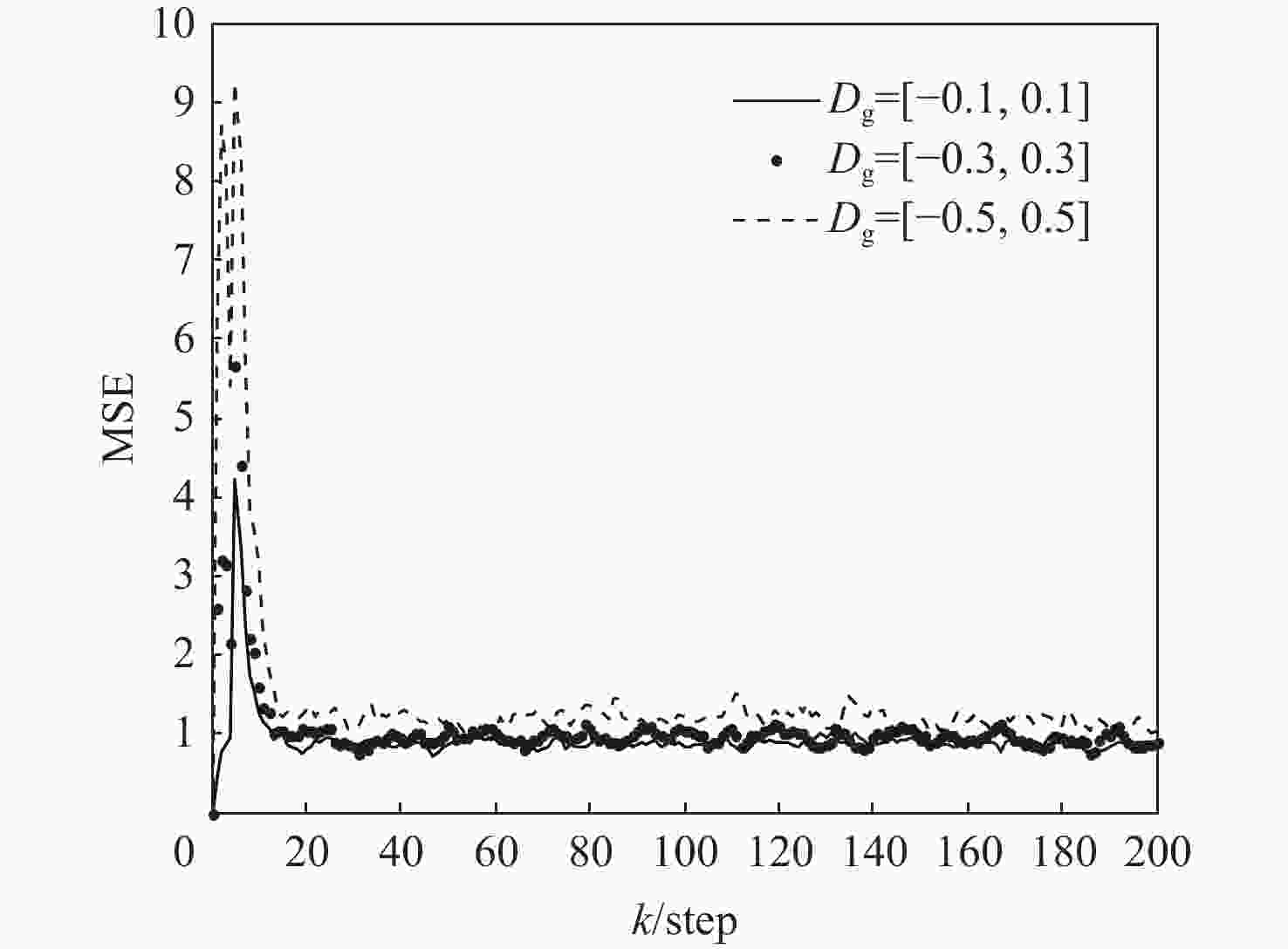
图 6 乘性噪声
${g_k}$ 与融合估计误差的关系Figure 6. Relationship between multiplicative noise
${g_k}$ and fusion estimation error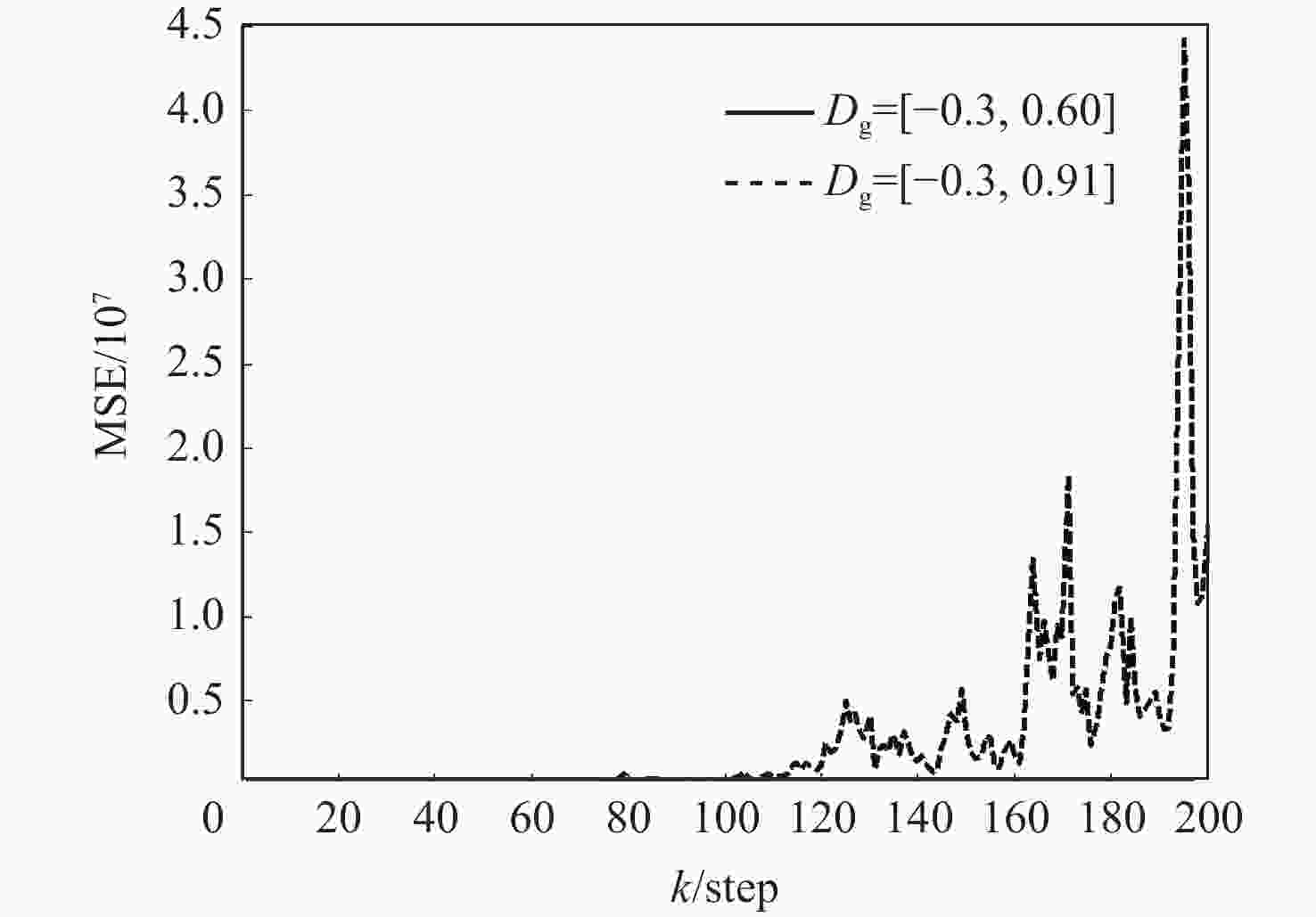
图 7 乘性噪声
${g_k}$ 特性与融合估计器有界性的关系Figure 7. Relationship between characteristics of multiplicative noise
${g_k}$ and fusion estimator boundedness
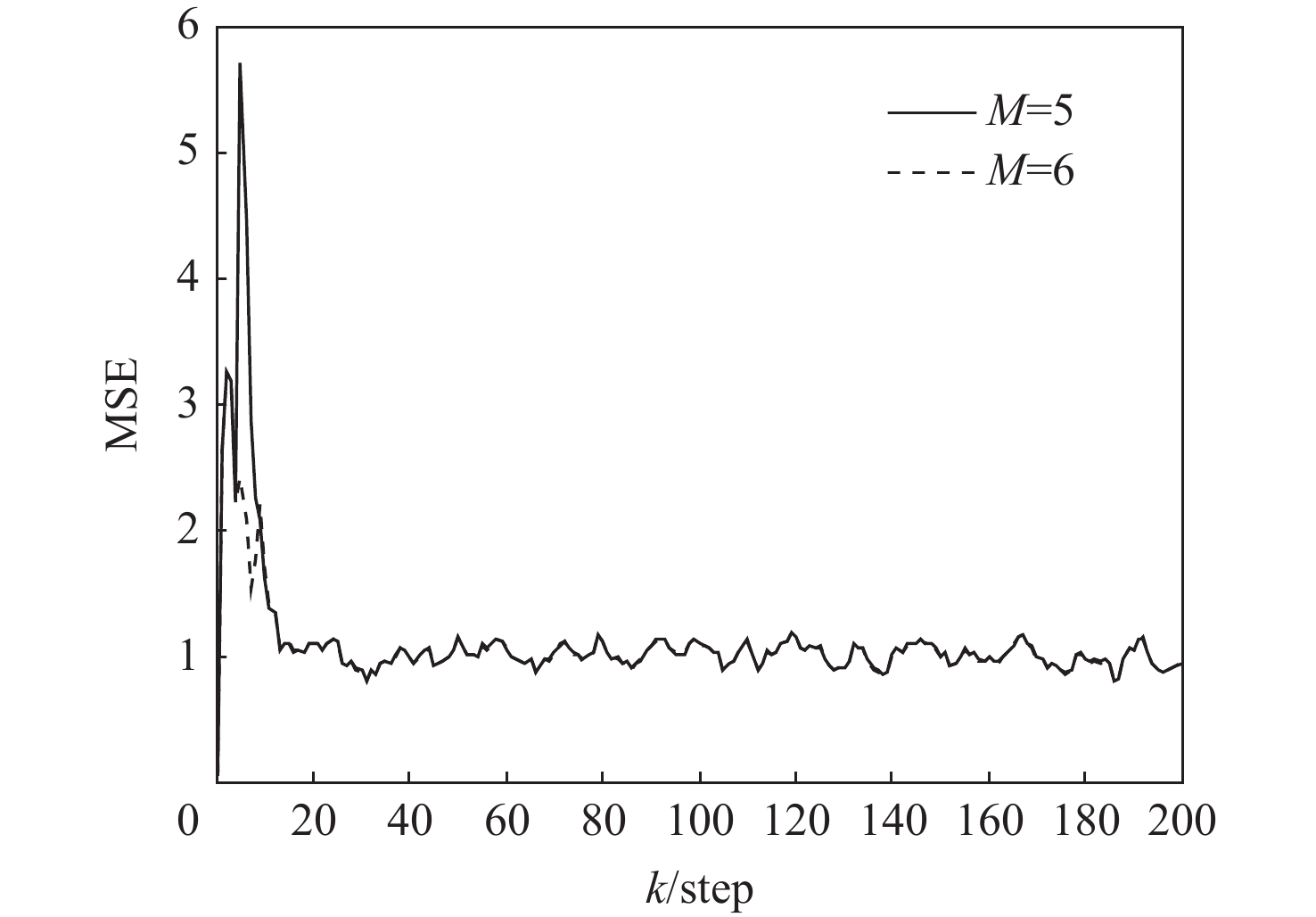
图 8 M取1,2,3,4,5时存储空间长度与融合估计精度的关系
Figure 8. Relationship between storage space length and fusion estimation accuracy when M=1,2,3,4,5
-
[1] 韩旭, 赵国荣, 王康. 基于线性编码补偿方法的非固定丢包率下的分布式融合估计器[J]. 北京航空航天大学学报, 2020, 46(6): 1229-1236. doi: 10.13700/j.bh.1001-5965.2019.0348HAN X, ZHAO G R, WANG K. A decentralized fusion estimator using linear coding compensation method with non-fixed dropout rates[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(6): 1229-1236(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0348 [2] HAN C, ZHANG H, FU M. Optimal estimation for networked systems with Markovian communication delays[J]. Automatica, 2013, 49: 3098-3104. [3] CHEN B, YU L, ZHANG W A. Distributed fusion estimation with missing measurements, random transmission delays and packet dropouts[J]. IEEE Transactions on Automatic Control, 2014, 59(7): 961-967. [4] ZHANG W A, YU L, FENG G. Optimal linear estimation for networked systems with communication constraints[J]. Automatica, 2011, 47(9): 1992-2000. doi: 10.1016/j.automatica.2011.05.020 [5] YONG S Z, ZHU M H, FRAZZOLI E. A unifled fllter for simultaneous input and state estimation of linear discrete-time stochastic systems[J]. Automatica, 2016, 63: 321-329. doi: 10.1016/j.automatica.2015.10.040 [6] MA J, SUN S L. Distributed fusion filter for networked stochastic uncertain systems with transmission delays and packet dropouts[J]. Signal Processing, 2017, 130: 268-278. doi: 10.1016/j.sigpro.2016.07.004 [7] SUN S L. Optimal linear filters for discrete-time systems with randomly delayed and lost measurements with/without time stamps[J]. IEEE Transactions on Automatic Control, 2013, 58(6): 1551-1556. doi: 10.1109/TAC.2012.2229812 [8] CHEN B, YU L, ZHANG W A. Robust Kalman filtering for uncertain state delay systems with random observation delays and missing measurements[J]. IET Control Theory and Applicatons, 2011, 5(17): 1945-1954. doi: 10.1049/iet-cta.2010.0685 [9] LIU Y, HE X, WANG Z D, et al. Optimal filtering for networked systems with stochastic sensor gain degradation[J]. Automatica, 2014, 50(5): 1521-1525. doi: 10.1016/j.automatica.2014.03.002 [10] 赵国荣, 韩旭, 万兵, 等. 具有传感器增益退化、随机时延和丢包的分布式融合估计器[J]. 自动化学报, 2016, 42(7): 1053-1064. doi: 10.16383/j.aas.2016.c150320ZHAO G R, HAN X, WAN B, et al. A decentralized fusion estimator with stochastic sensor gain degradation, delays and data dropouts[J]. Acta Automatica Sinica, 2016, 42(7): 1053-1064(in Chinese). doi: 10.16383/j.aas.2016.c150320 [11] SCHENATO L. Optimal sensor fusion for distributed sensors subject to random delay and packet loss[C]//Proceedings of the 46the IEEE Conference on Decision and Control. Piscataway: IEEE Press, 2007: 12-17. [12] SUN S L, LIN H L, MA J, et al. Multi-sensor distributed fusion estimation with applications in networked systems: A review paper[J]. Information Fusion, 2017, 38: 122-134. doi: 10.1016/j.inffus.2017.03.006 [13] CHEN B, HU G Q, HO D W C, et al. Distributed covariance intersection fusion estimation for cyber-physical systems with communication constraints[J]. IEEE Transactions on Automatic Control, 2016, 61(12): 4020-4026. doi: 10.1109/TAC.2016.2539221 [14] CHEN B, ZHANG W A, YU L, et al. Distributed fusion estimation with communication bandwidth constraints[J]. IEEE Transactions on Automatic Control, 2015, 60(5): 1398-1403. doi: 10.1109/TAC.2014.2357113 [15] 祁 波, 孙书利. 带未知通信干扰和丢包补偿的多传感器网络化不确定系统的分布式融合滤波. 自动化学报, 2018, 44(6): 1107-1114.QI B, SUN S L. Distributed fusion filtering for multi-sensor networked uncertain systems with unknown communication disturbances and compensations of packet dropouts[J]. Acta Automatica Sinica, 2018, 44(6): 1107-1114 (in Chinese). [16] NOACK B, SIJS J, REINHARDT M, et al. Decetralized data fusion with inverse covariance intersection[J]. Automatica, 2017, 79: 35-42. doi: 10.1016/j.automatica.2017.01.019 [17] SINOPOLI B, SCHENATO L, FRANCESCHETTI M, et al. Kalman flltering with intermittent observations[J]. IEEE Transactions on Automatic Control, 2004, 49(9): 1453-1464. doi: 10.1109/TAC.2004.834121 -

 下载:
下载:












 点击查看大图
点击查看大图

计量
- 文章访问数: 320
- HTML全文浏览量: 57
- PDF下载量: 17
- 被引次数: 0
