



-
摘要:
近年来在机场高填方工程中应用无人冲击碾压机已成为一种新趋势,而冲碾机在地头转向处常出现较大的跟踪误差,从而影响工作区的压实。提出一种适用于冲碾机地头转向的路径优化方法,有效提高冲碾机转向跟踪精度。基于2种广义初等曲线的计算方法,建立U型转向路径,并综合考虑最小转弯半径和曲率连续的条件,在靠近原规划路径处筛选出有效路径。基于广义双初等曲线的计算方法,建立Ω型转向路径,并综合考虑了最小转弯半径和曲率连续的约束条件,在靠近原规划路径处筛选出有效路径。基于MATLAB/Simulink平台搭建的模型预测控制器(MPC),仿真对比原规划路径与优化后路径的轨迹跟踪效果,结果表明:U型转向和Ω型转向优化后的路径跟踪效果都较好,从而验证所提优化方法的有效性。
Abstract:In recent years, the application of unmanned impact rollers in high embankment engineering of airport has become a new trend. However, large tracking errors often occur at the start and the end point of the headland, which affects the compaction effectiveness of the working area. In this paper, a path optimization method is proposed to improve the steering tracking performance. Firstly, the U-shaped turning path derived from generalized elementary curve is established based on two calculation methods, and the optimized path is selected near the original planning path considering minimum turning radius and the smoothness of the curvature of curve. Then, the Ω-shaped turning path is formed by bi-elementary curve, and the optimized path is selected with the same method as above. Finally, the model predictive control (MPC) simulator is established to simulate the trajectory tracking effect of various paths. The results showed that the tracking effect of the optimized path is better than the original path, indicating the effectiveness of the proposed path optimization method.
-
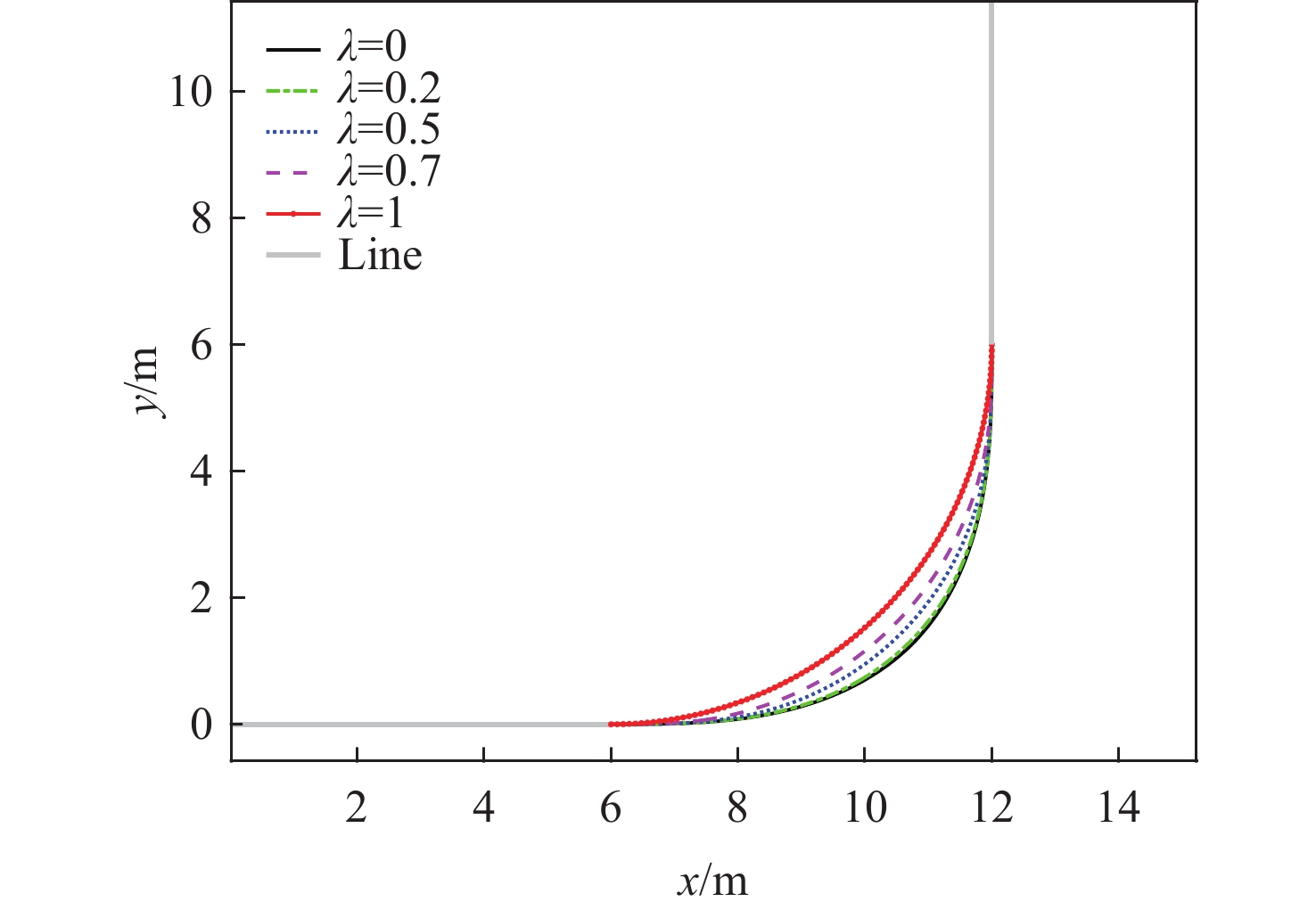
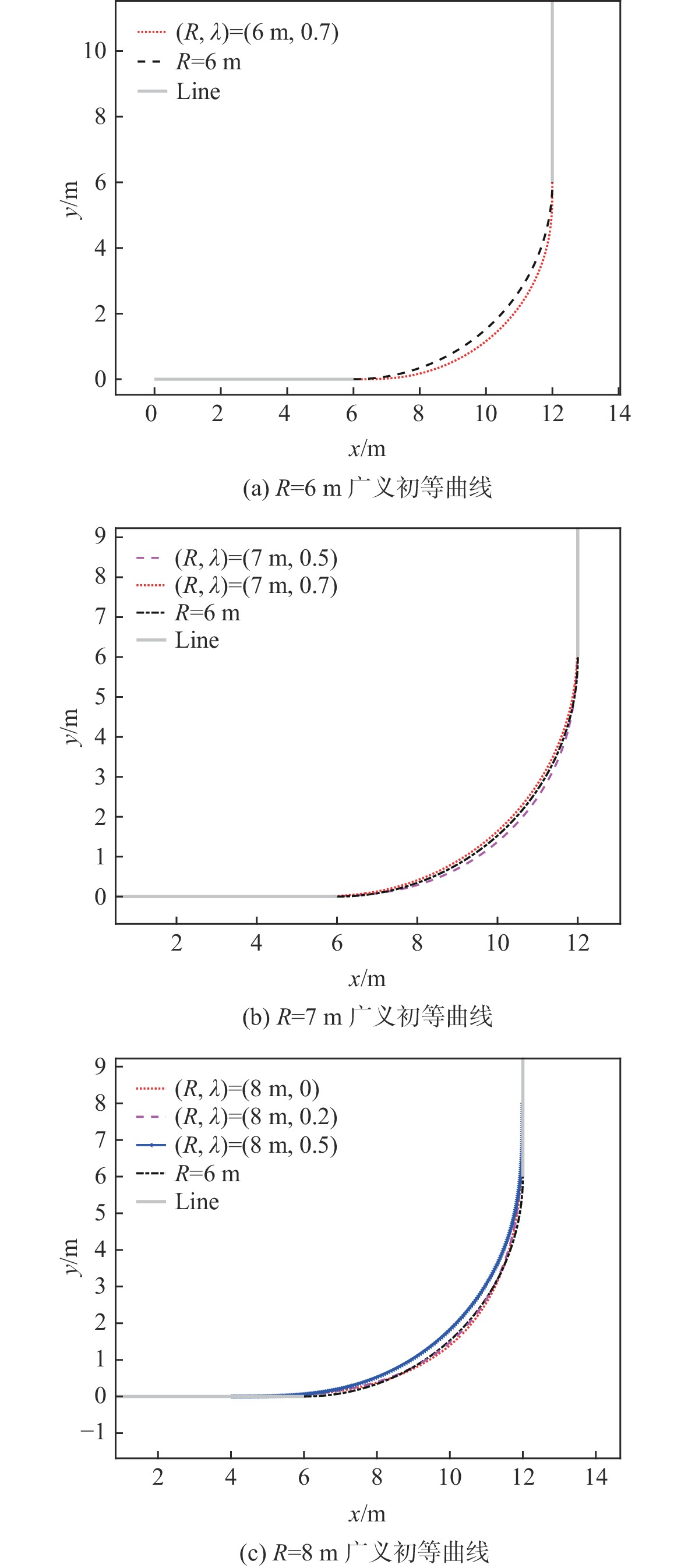
图 4 R=6 m不同λ取值的广义初等曲线
Figure 4. Generalized elementary curves with different λ for R=6 m

图 7
$R'=6\;{\rm{m}} $ 不同λ值的曲线Figure 7. Generalized elementary curves with different λ for
$R'=6\;{\rm{m}} $ 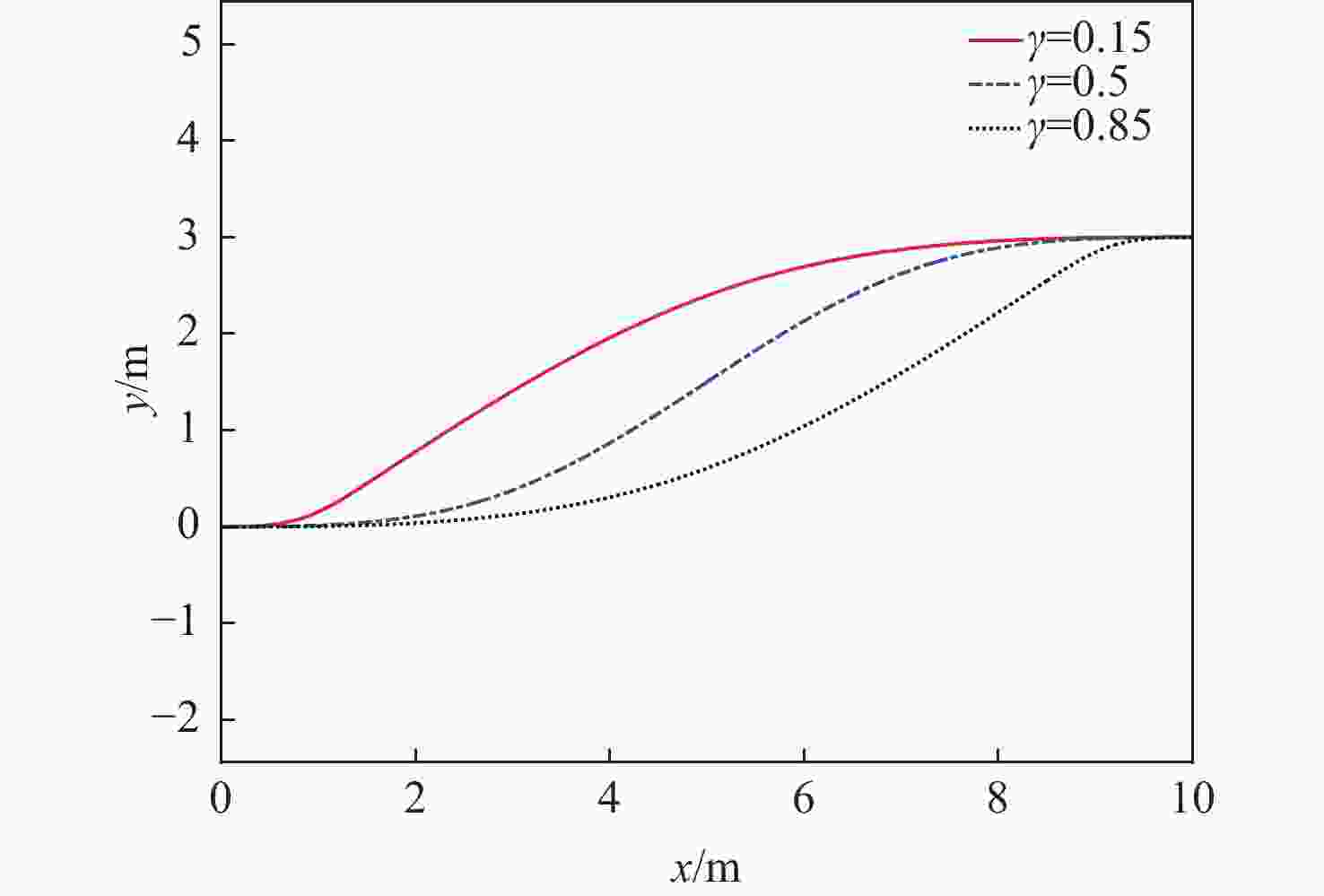
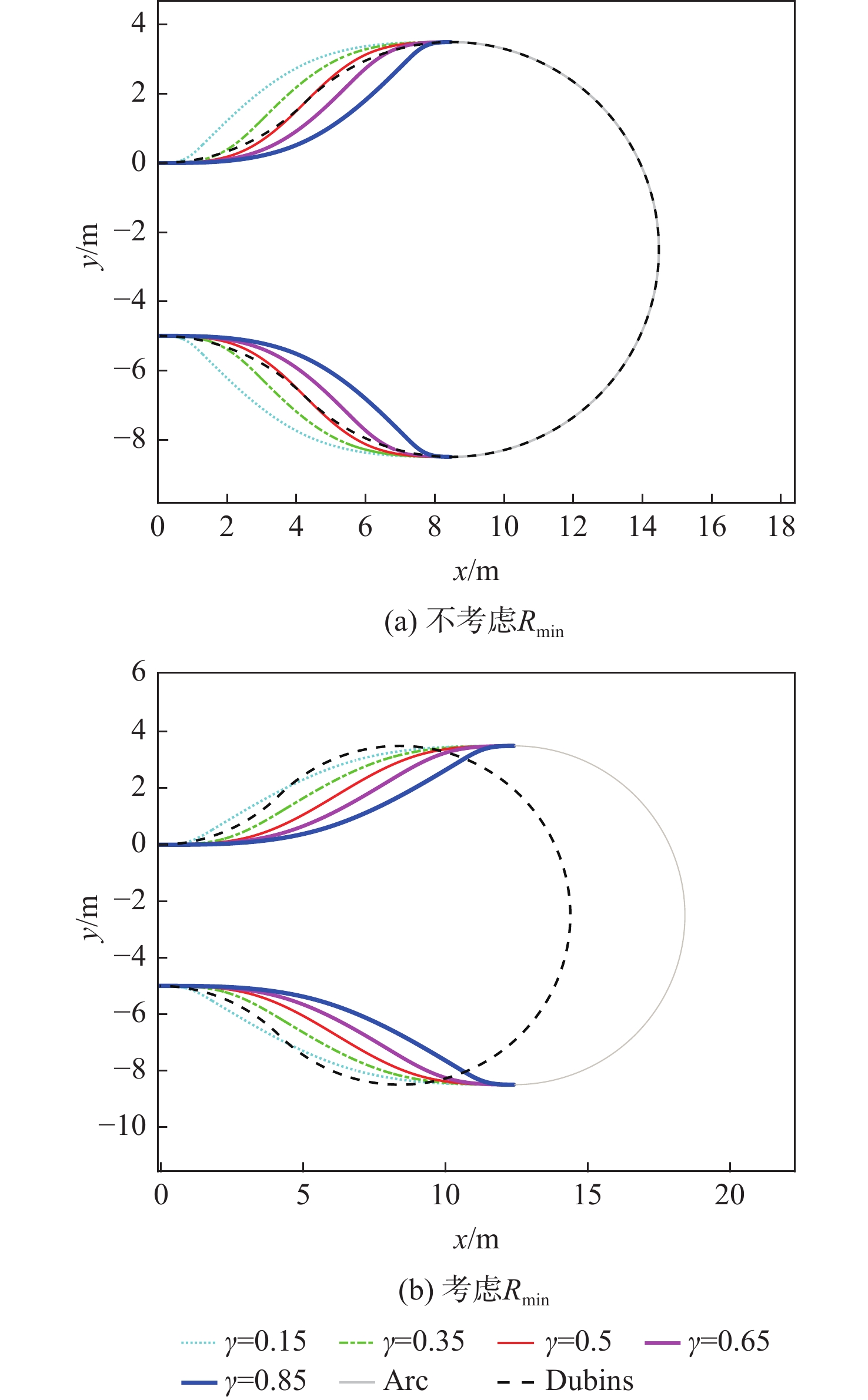
图 9 不同γ取值的双初等路径示意图
Figure 9. Schematic diagram of bi-elementary paths with different γ values
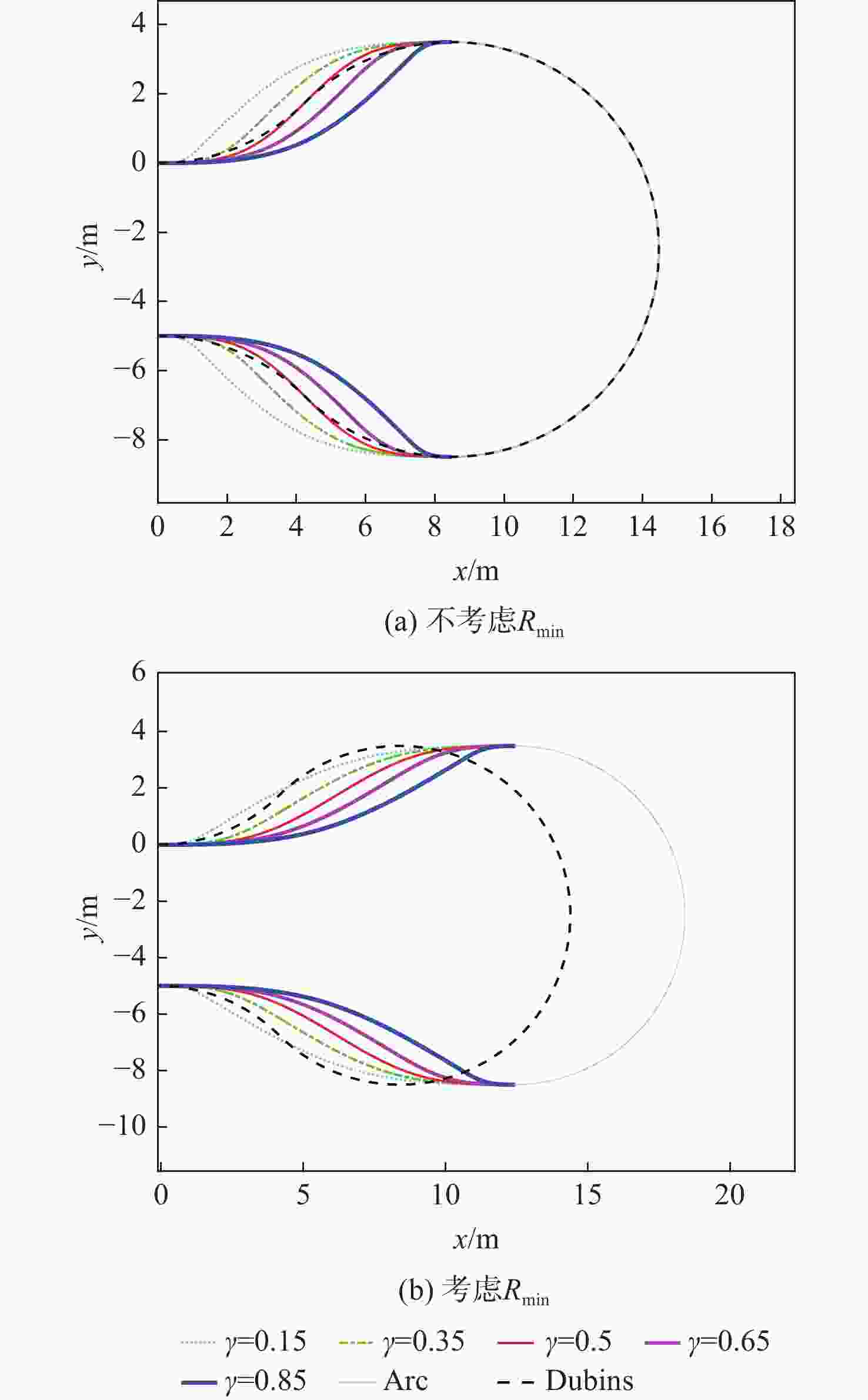
图 10 不同γ取值的Ω型转向路径及曲率
Figure 10. Ω-shaped turning paths and curvature with different γ values

图 11 曲率连续的Ω型转向路径及曲率
Figure 11. Ω-shaped turning path with continuous curvature and curvature change of the path
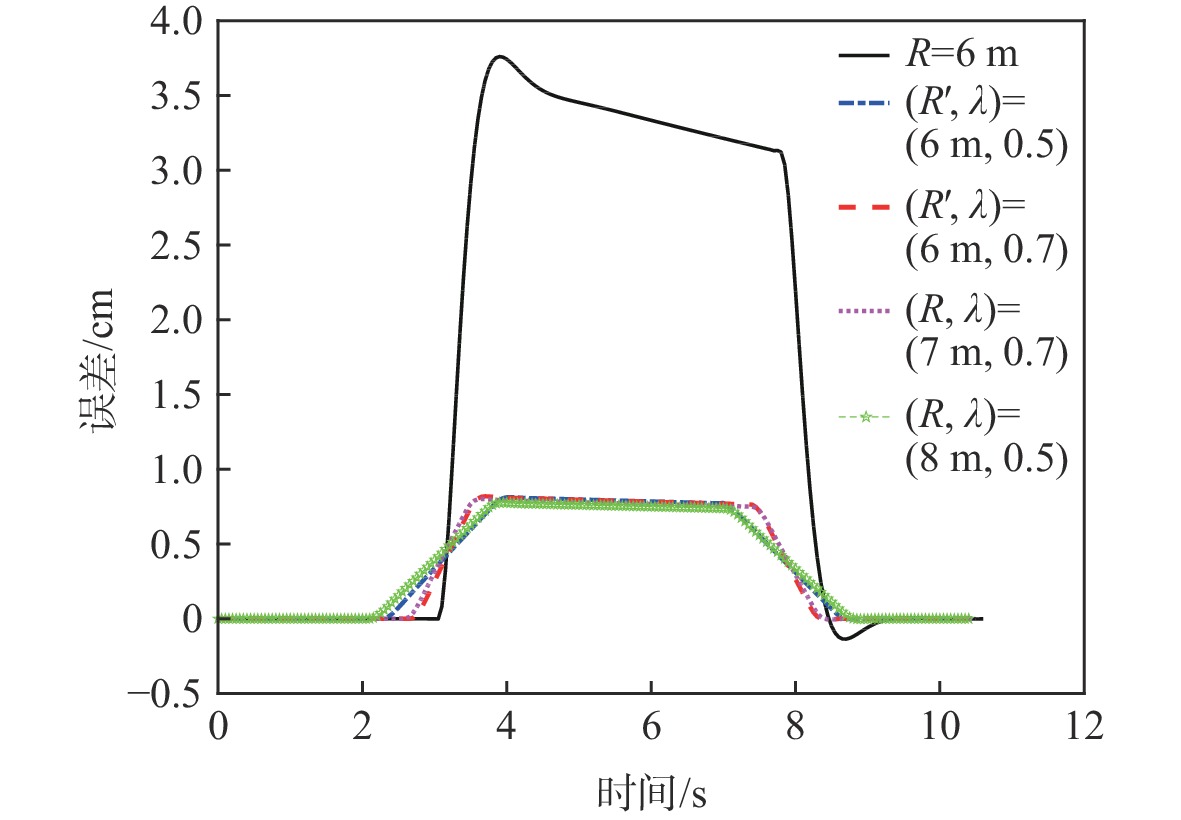
图 13 不同U型转向路径下横向跟踪误差
Figure 13. Lateral error of trajectory tracking for different U-shaped turning paths
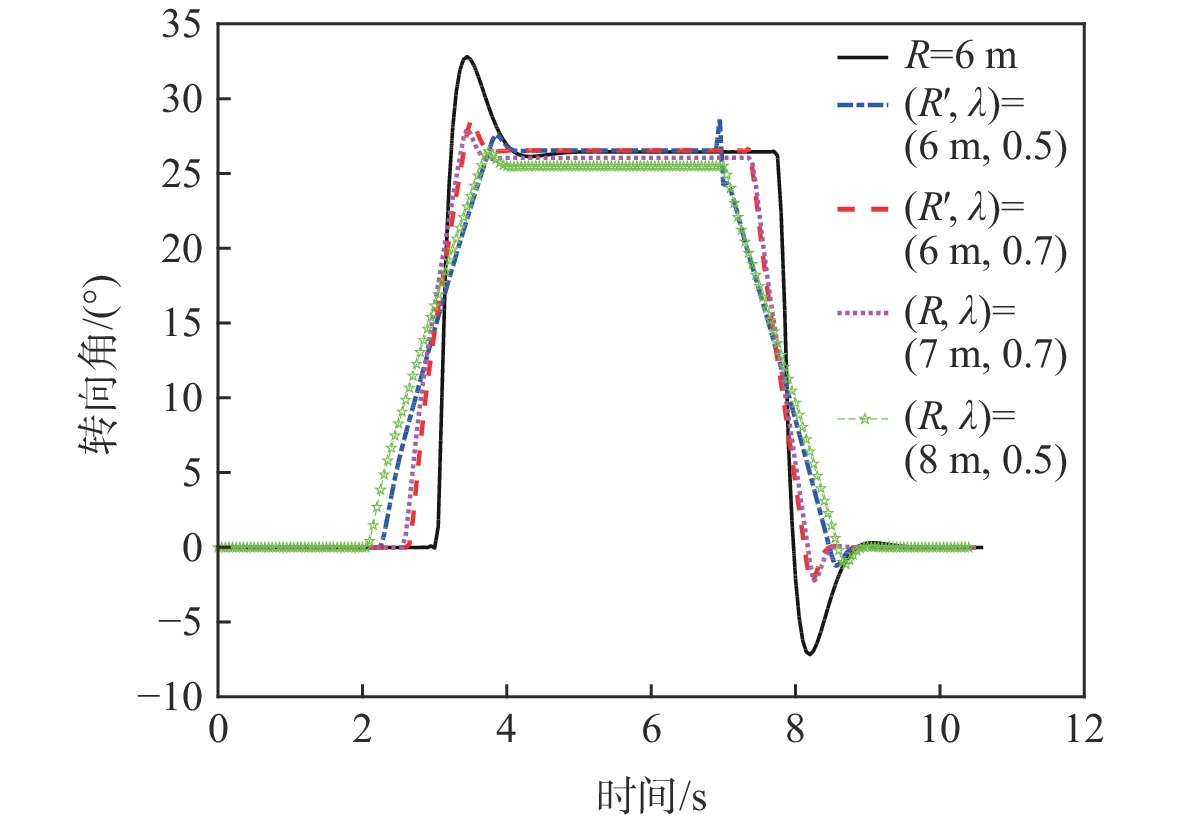
图 14 不同U型转向路径下轨迹跟踪的转向角
Figure 14. Steering angle of trajectory tracking for different U-shaped turning paths

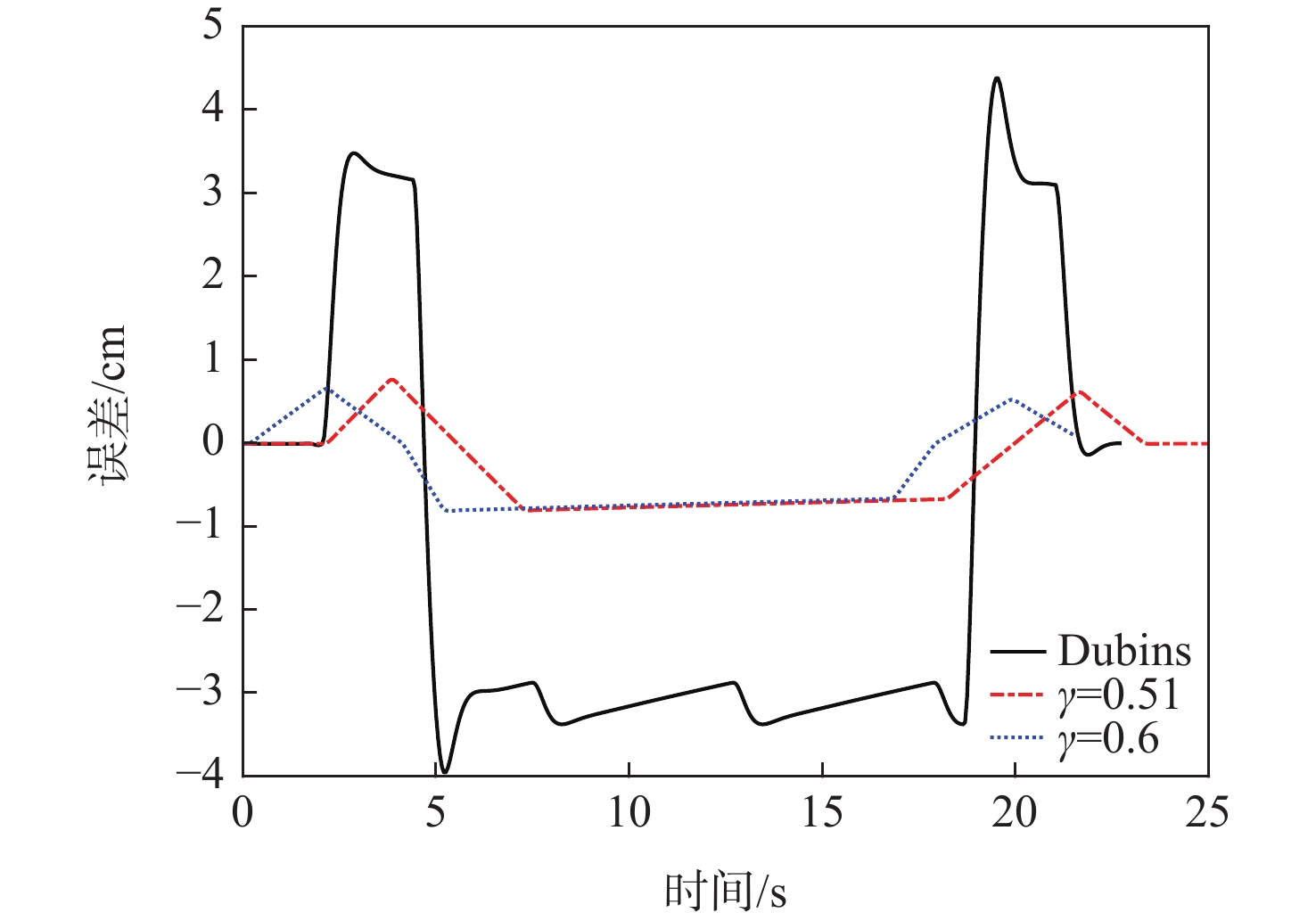
图 15 不同Ω型转向路径下横向跟踪误差
Figure 15. Lateral error of trajectory tracking for different Ω-shaped turning paths
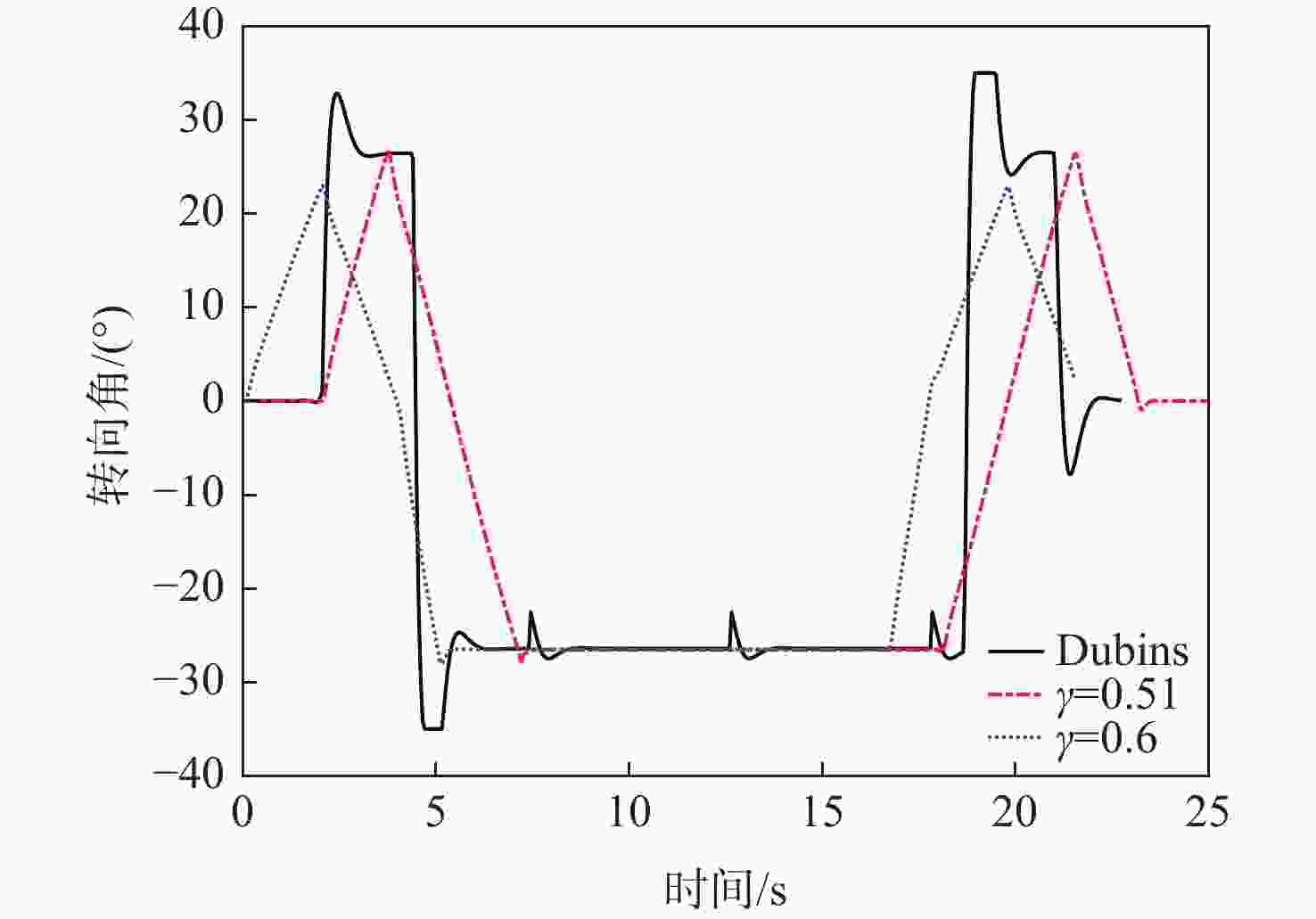
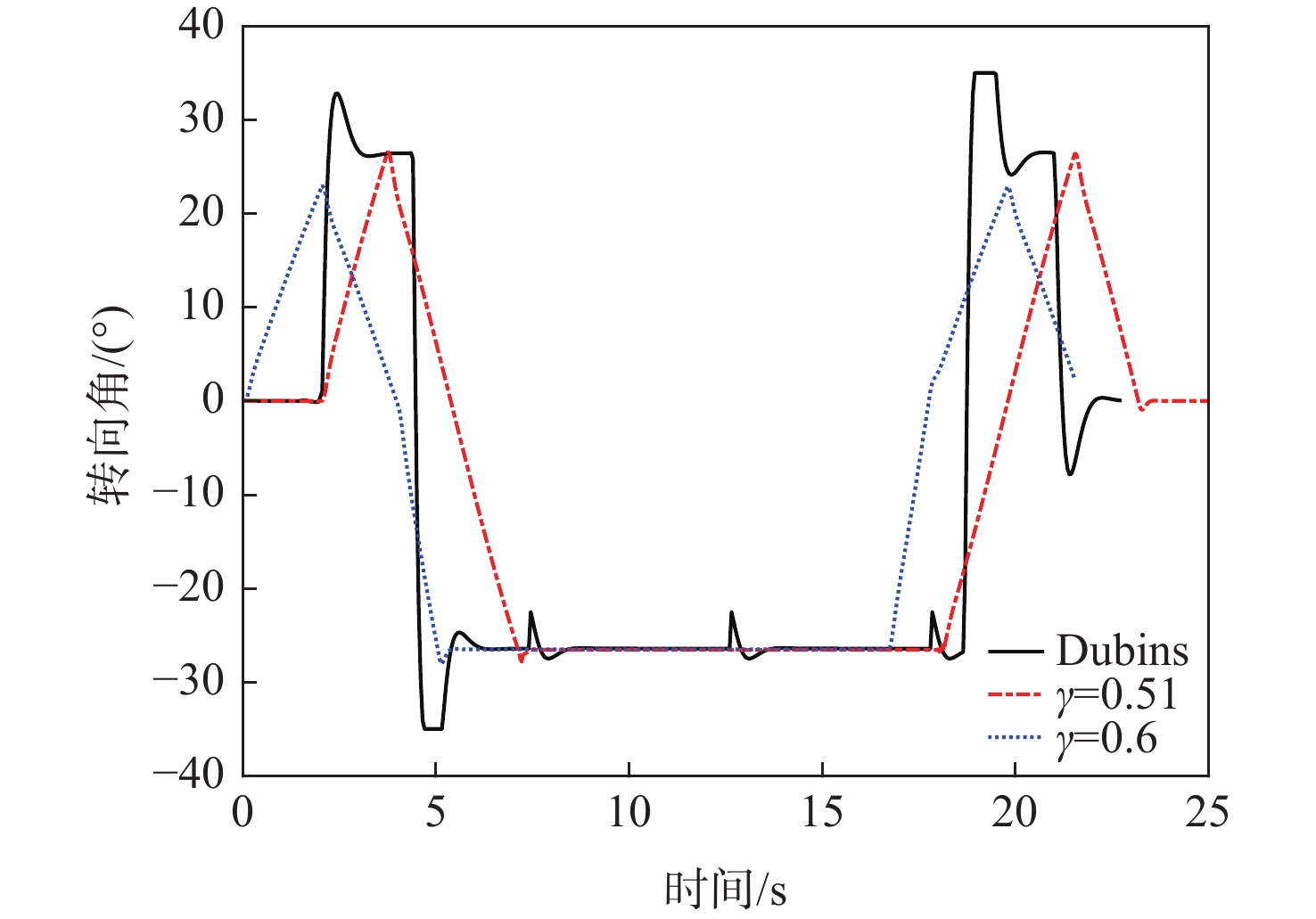
图 16 不同Ω型转向路径下轨迹跟踪转向角
Figure 16. Steering angle of trajectory tracking for different Ω-shaped turning paths
表 1 不同λ值的R约束值
Table 1. R constraint values with different λ values
组 λ D R≥ 组 λ D R≥ 第1组 0 0.8418 11.22 第4组 0.7 0.8738 6.85 第2组 0.2 0.845 9.39 第5组 0.9 0.8908 6.25 第3组 0.5 0.8592 7.63  下载: 导出CSV
下载: 导出CSV
-
[1] YAO Y P, RUAN Y Z, CHEN J, et al. Research on a real-time monitoring platform for compaction of high embankment in airport engineering[J]. Journal of Construction Engineering & Management, 2018, 144(1): 04017096. [2] 王常顺, 张煌, 潘为刚, 等. 冲击压路机自动驾驶控制系统及方法: CN109799830A[P]. 2019-05-24.WANG C S, ZHANG H, PAN W G, et al. Automatic driving control system and method for impact roller: CN109799830A[P]. 2019-05-24(in Chinese). [3] ZHANG X, LUO T, SONG E B, at el. Algorithm for optimal path planning of impact roller in high-embankment airport[J]. Japanese Geotechnical Society Special Publication, 2020, 8(5): 159-163. doi: 10.3208/jgssp.v08.c06 [4] 杨洁. 基于WSN的农机自动导航技术研究[D]. 成都: 西南交通大学, 2018: 17-19.YANG J. Research on agricultural machinery automatic navigation based on wireless sensor networks[D]. Chengdu: Southwest Jiaotong University, 2018: 17-19(in Chinese). [5] 黄小毛, 丁幼春, 宗望远, 等. 农机作业地头转弯方式及路径生成算法研究[C]//中国农业工程学会2011年学术年会, 2011: 1-6.HUANG X M, DING Y C, ZONG W Y, et al. Turning mode and path generation algorithm for the agricultural vehicles[C]// Proceedings of 2011 Academic Annual Meeting of China Agricultural Engineering Society, 2011: 1-6(in Chinese). [6] SONG E B, ZHANG X. Research on the path optimization of unmanned rolling impaction for high embankment of airport[J]. Japanese Geotechnical Society Special Publication, 2020, 8(5): 142-148. doi: 10.3208/jgssp.v08.c05 [7] GÓMEZ-BRAVO F, CUESTA F, OLLERO A, et al. Continuous curvature path generation based on β-spline curves for parking manoeuvres[J]. Robotics and Autonomous Systems, 2008, 56: 360-372. doi: 10.1016/j.robot.2007.08.004 [8] DONG W, DING Y, HUANG J, et al. An optimal curvature smoothing method and the associated real-time interpolation for the trajectory generation of flying robots[J]. Robotics and Autonomous Systems, 2019, 115: 73-82. doi: 10.1016/j.robot.2019.02.004 [9] BACKMAN J, PIIRAINEN P, OKSANEN T. Smooth turning path generation for agricultural vehicles in headlands[J]. Biosystems Engineering, 2015, 139: 76-86. doi: 10.1016/j.biosystemseng.2015.08.005 [10] GRAF PLESSEN M M, BEMPORAD A. Reference trajectory planning under constraints and path tracking using linear time-varying model predictive control for agricultural machines[J]. Biosystems Engineering, 2017, 153: 28-41. doi: 10.1016/j.biosystemseng.2016.10.019 [11] FUNKE J, GERDES J C. Simple clothoid lane change trajectories for automated vehicles incorporating friction constraints[J]. Journal of Dynamic Systems, Measurement, and Control, 2016, 138: 021002. doi: 10.1115/1.4032033 [12] VAZQUEZ-MENDEZ M E, CASAL G. The clothoid computation: A simple and efficient numerical algorithm[J]. Journal of Surveying Engineering, 2016, 142(3): 04016005. doi: 10.1061/(ASCE)SU.1943-5428.0000177 [13] CARIOUS C, GOBOR Z, SEIFERTH B, et al. Mobile robot trajectory planning under kinematic and dynamic constraints for partial and full field coverage[J]. Journal of Field Robotics, 2017, 34(7): 1297-1312. doi: 10.1002/rob.21707 [14] 龚建伟, 姜岩, 徐威. 无人驾驶车辆模型预测控制[M]. 北京: 北京理工大学出版社, 2014: 45-48.GONG J W, JIANG Y, XU W. Model predictive control of unmanned vehicle[M]. Beijing: Beijing Institute of Technology Press, 2014: 45-48 (in Chinese) . -

 下载:
下载:













 点击查看大图
点击查看大图

计量
- 文章访问数: 205
- HTML全文浏览量: 70
- PDF下载量: 15
- 被引次数: 0
