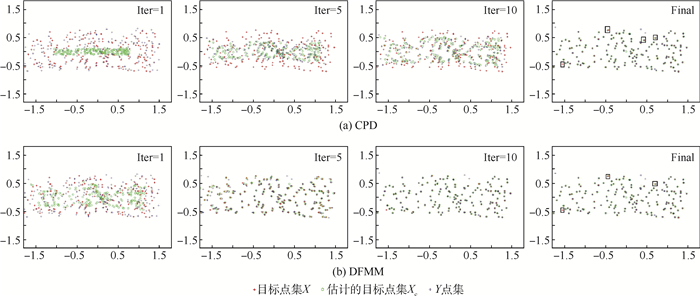
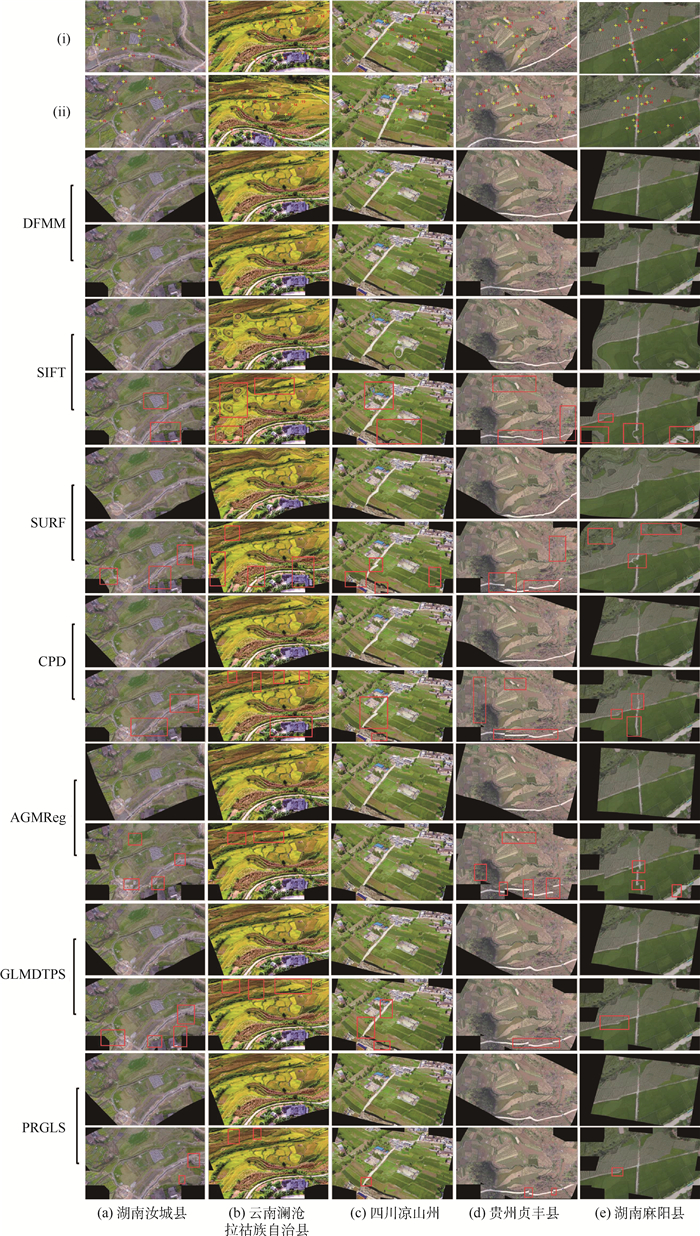
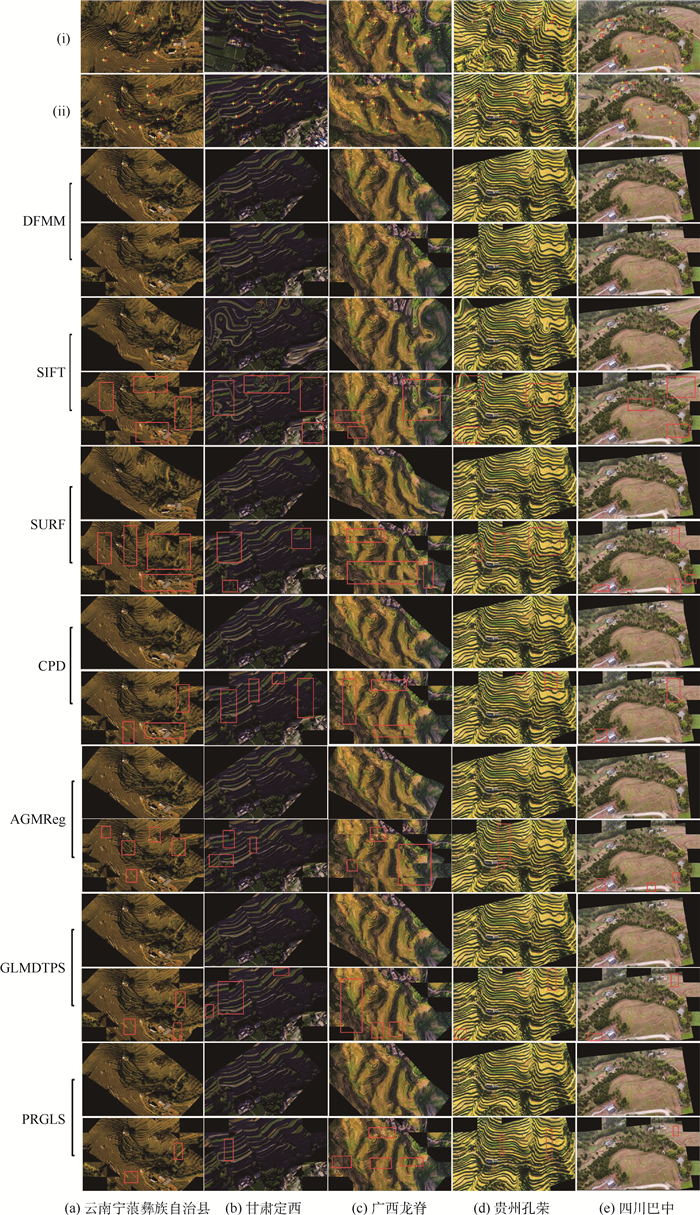
Small unmanned aerial vehicle (UAV) aerial images (low-altitude remote sensing image) of arable land in hills and mountains are confronted with multiple challenges of image processing due to its scale change, geometric distortion and image overlap. To address the problems, the low-altitude remote sensing image registration algorithm based on dual-feature for arable land in hills and mountains was proposed. Due to the complex environment and the influence of light factors in hills and mountains, the feature points of remote sensing images are extracted by using the scale-invariant SURF algorithm. And then the dual-feature descriptor using geometrical structure of aerial images was constructed. On this basis, by taking Gaussian mixture model (GMM) as the core and combining with two single feature difference descriptors (i.e., global distance descriptor based on euclidean distance and local structure descriptor based on sum vectors), the dual-feature finite mixture model (DFMM) was obtained, which can simultaneously evaluate the correspondence between two features. With the reproducing kernel Hilbert space (RKHS), the spatial transformation of the global and local structure of the registration image was carried out based on the Gaussian radial basis function (GRBF). In order to verify the feasibility and performance of the proposed algorithm, experiments were carried out by using UAV images with different viewpoints taken from sloping arable land in hills and mountains. Experimental results show that comparing with SIFT, SURF, CPD, AGMReg, GLMDTPS and PRGLS, our method provides better performances in most cases, and can apply to multi-view remote sensing image registration of other complex terrain by small UAV.



 Download (29638)
Download (29638) 
 Views
Views  Cited by
Cited by 










































 XML Online Production Platform
XML Online Production Platform
