| Citation: | LIU M J,LUO J W,QIN S Y. 3D SLAM algorithm based on geometric constraints of feature points in dynamic scenarios[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(9):2872-2884 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0721

|
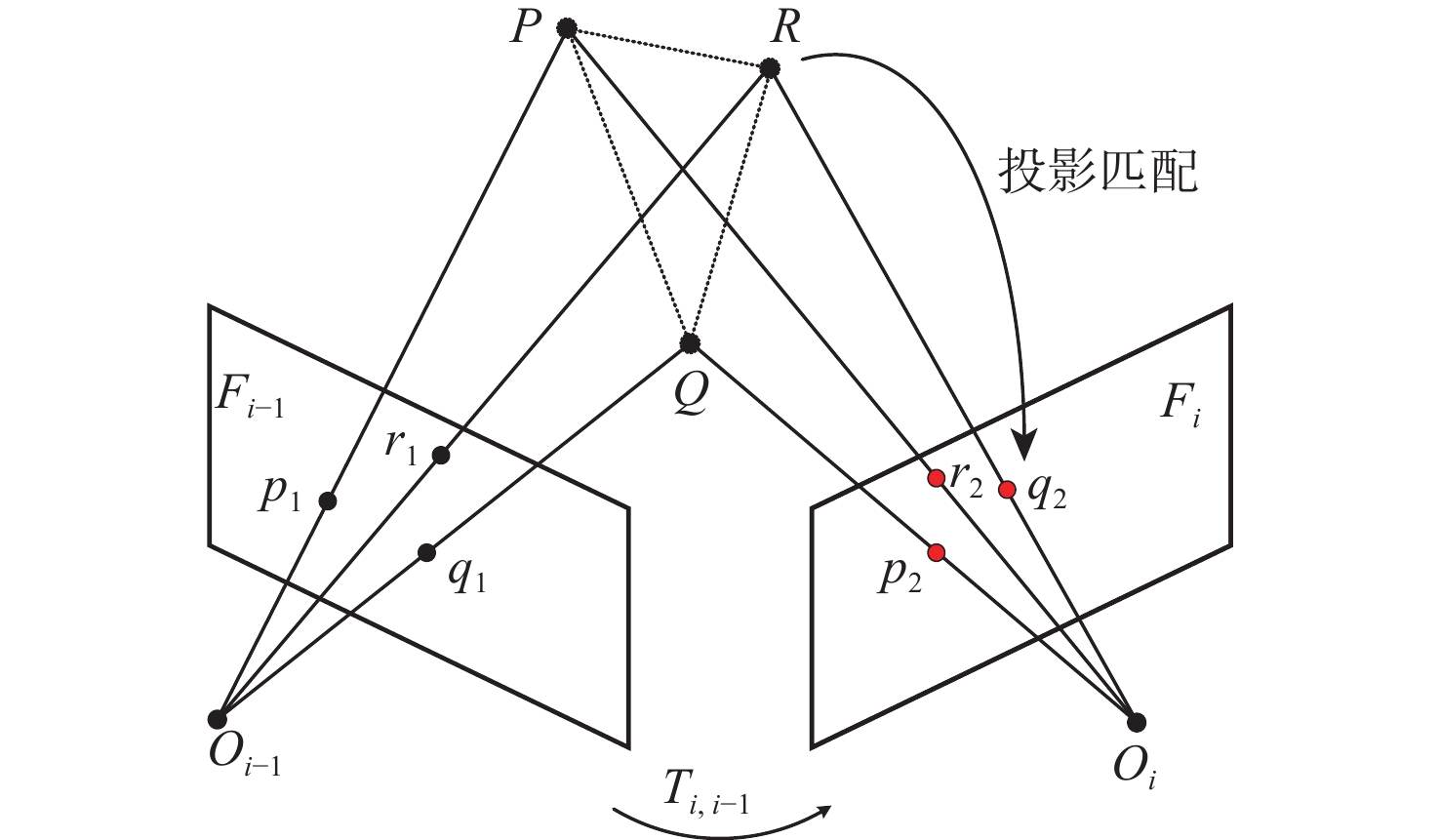
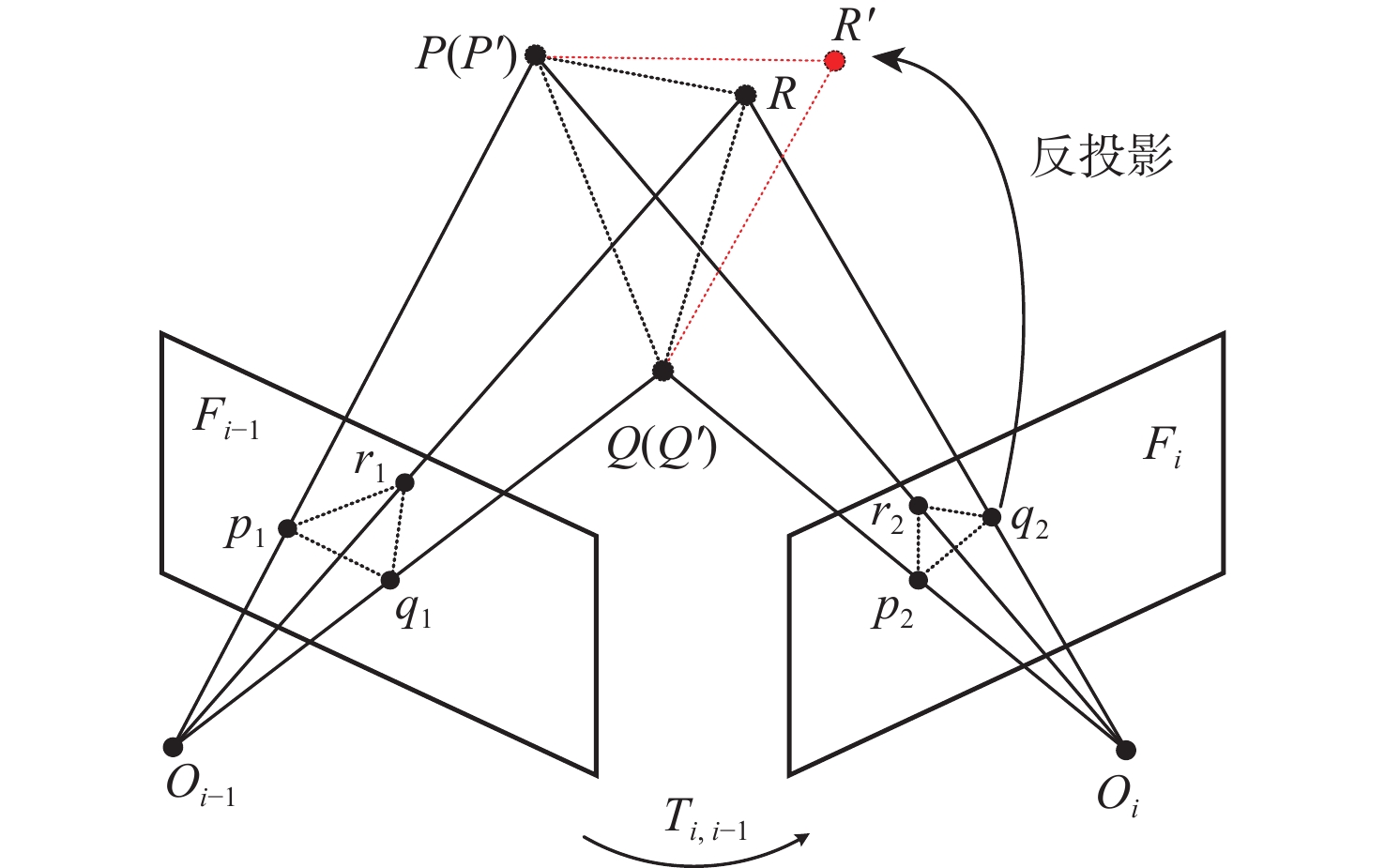
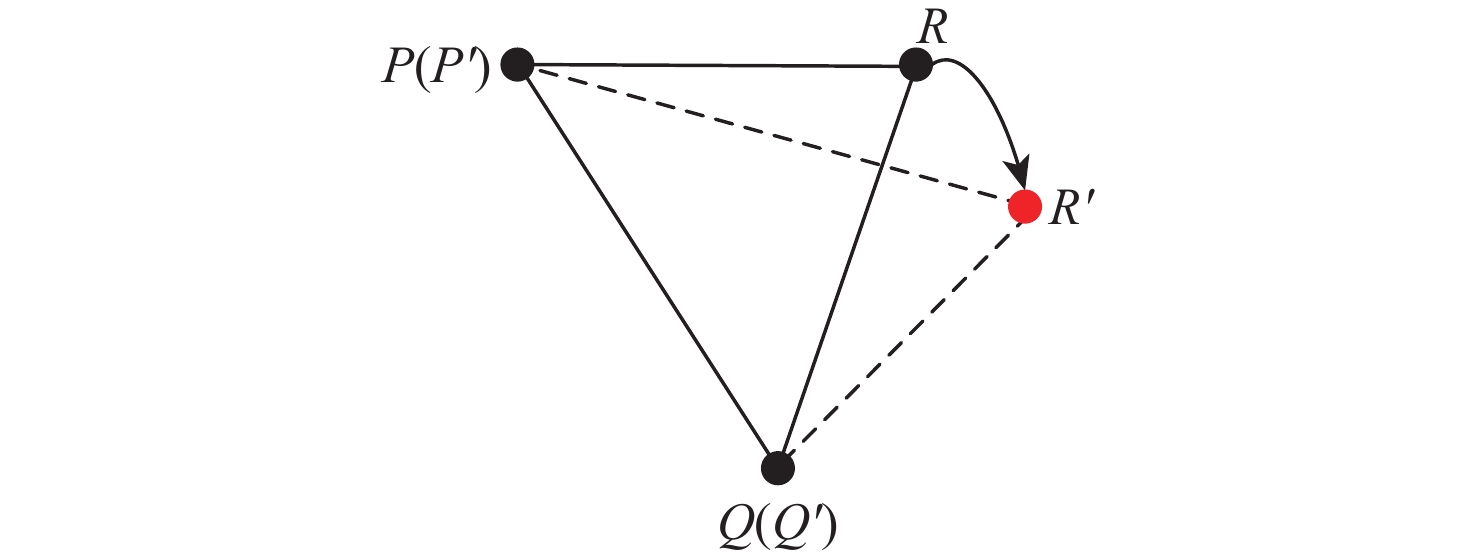
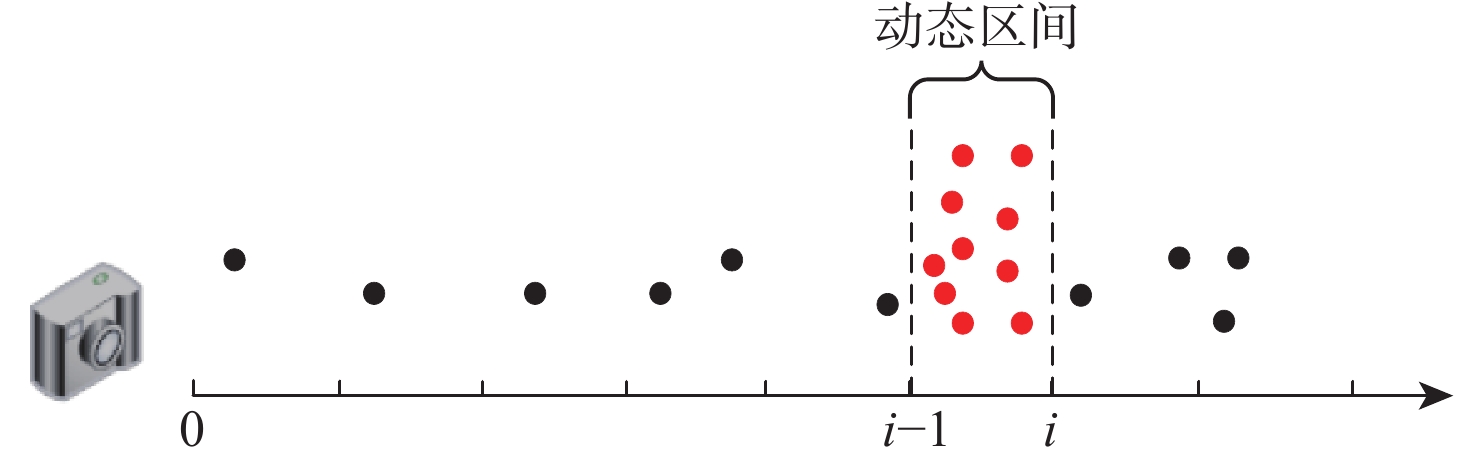
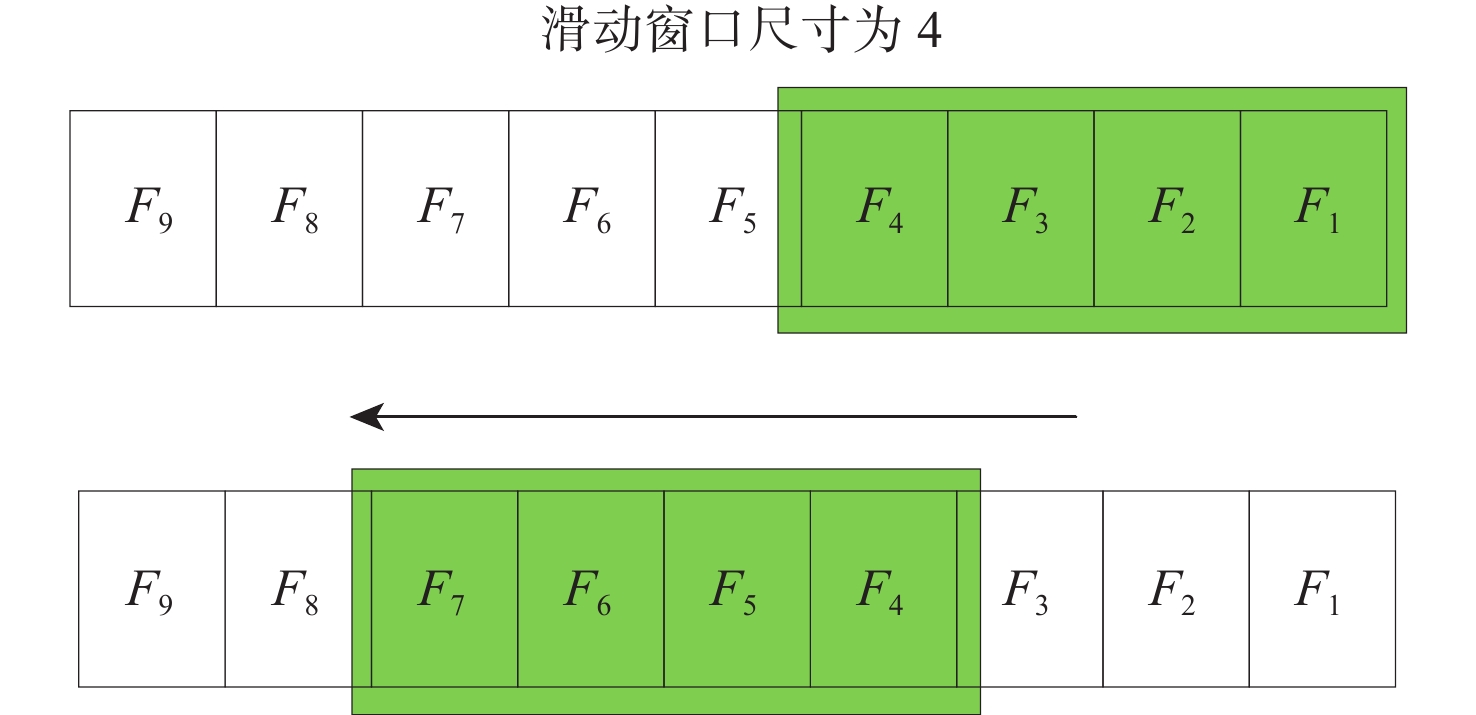
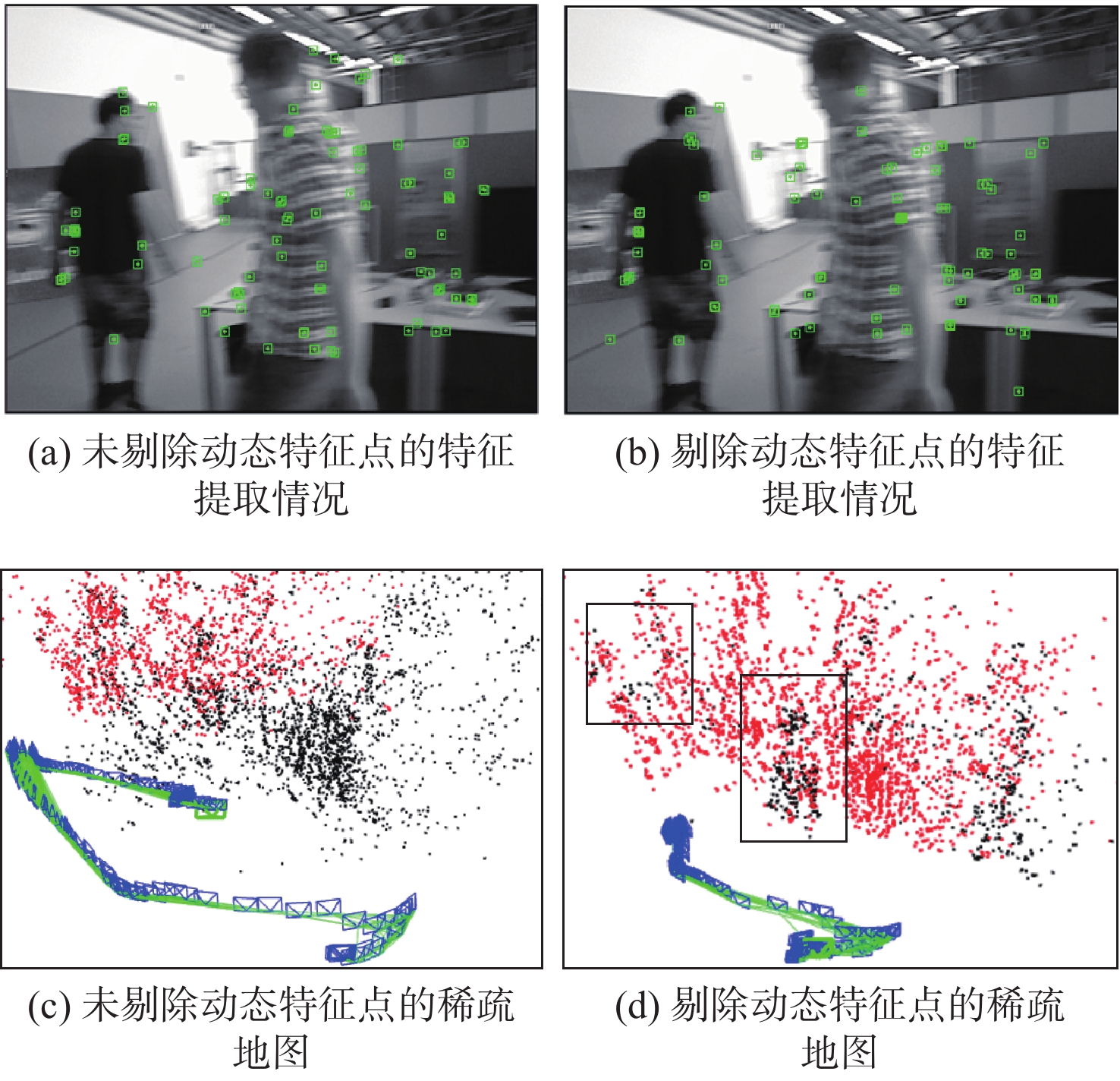
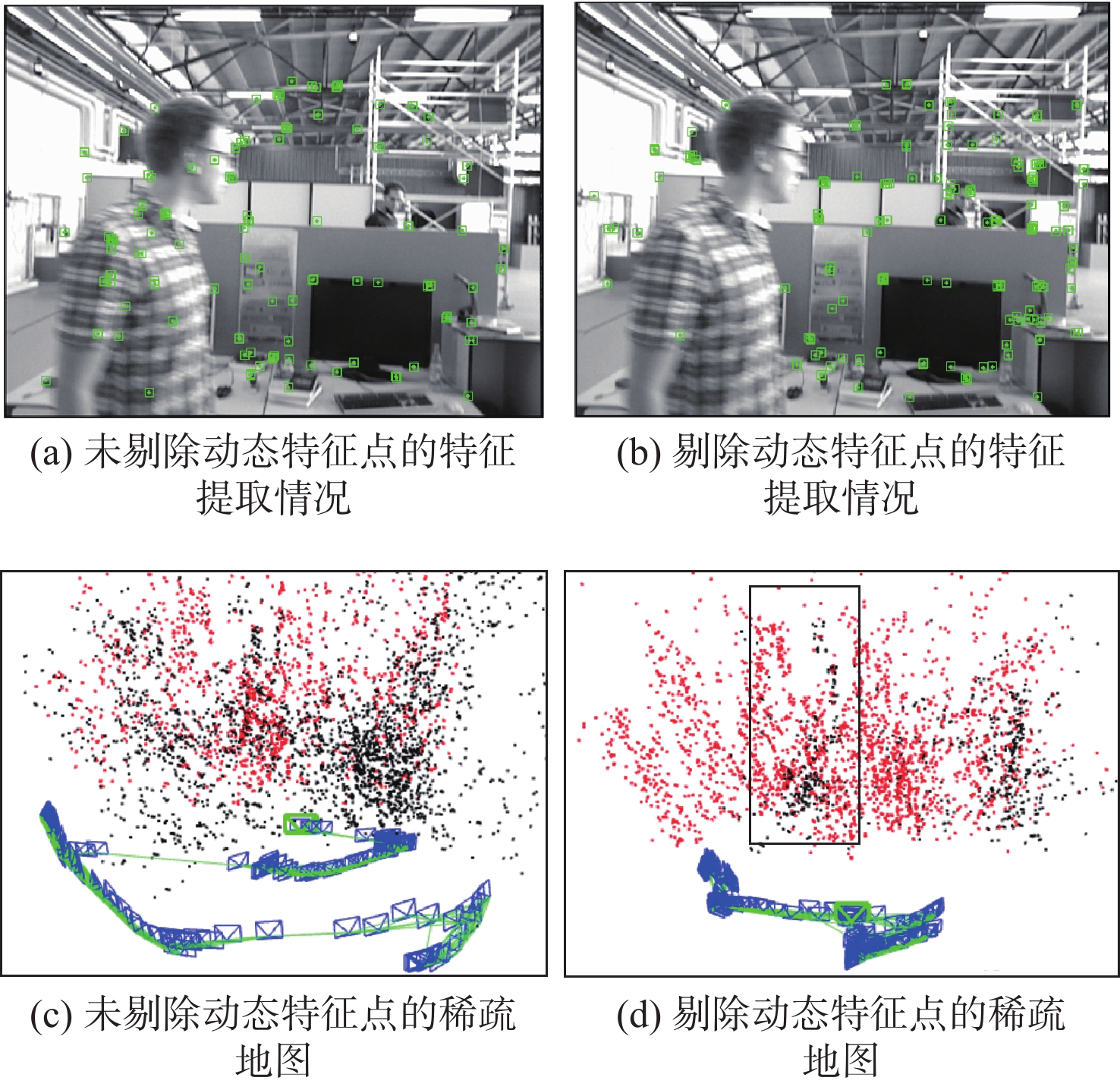
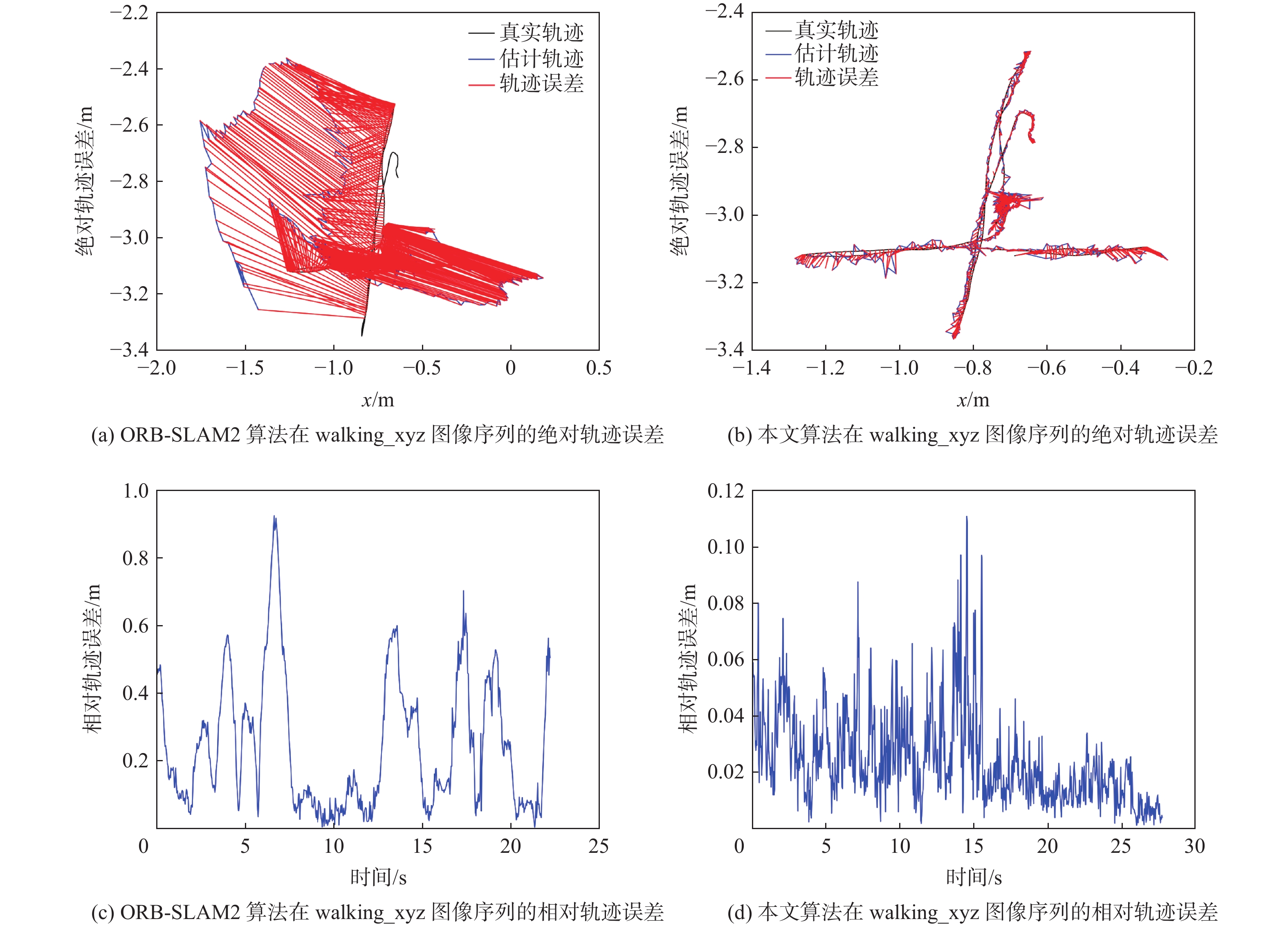
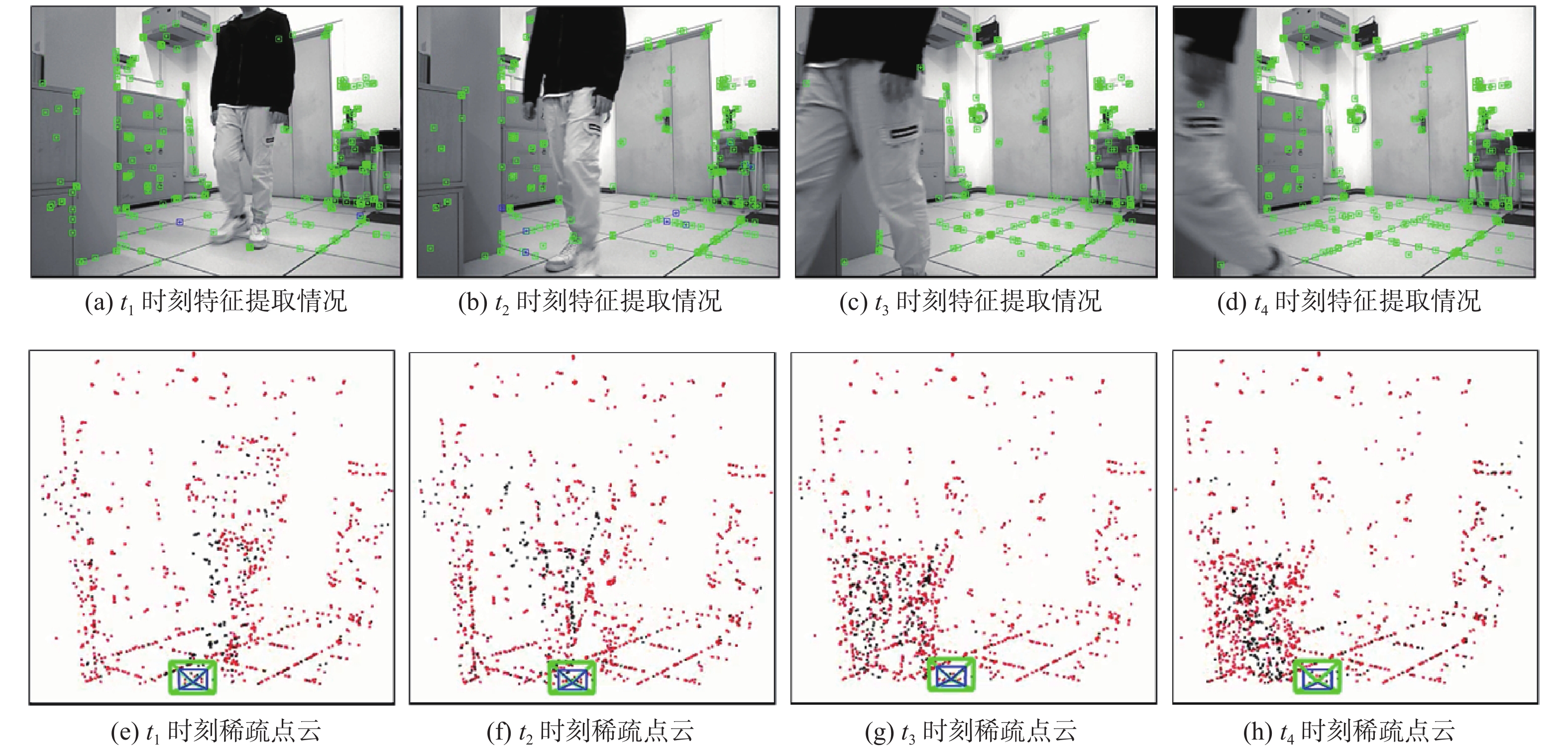
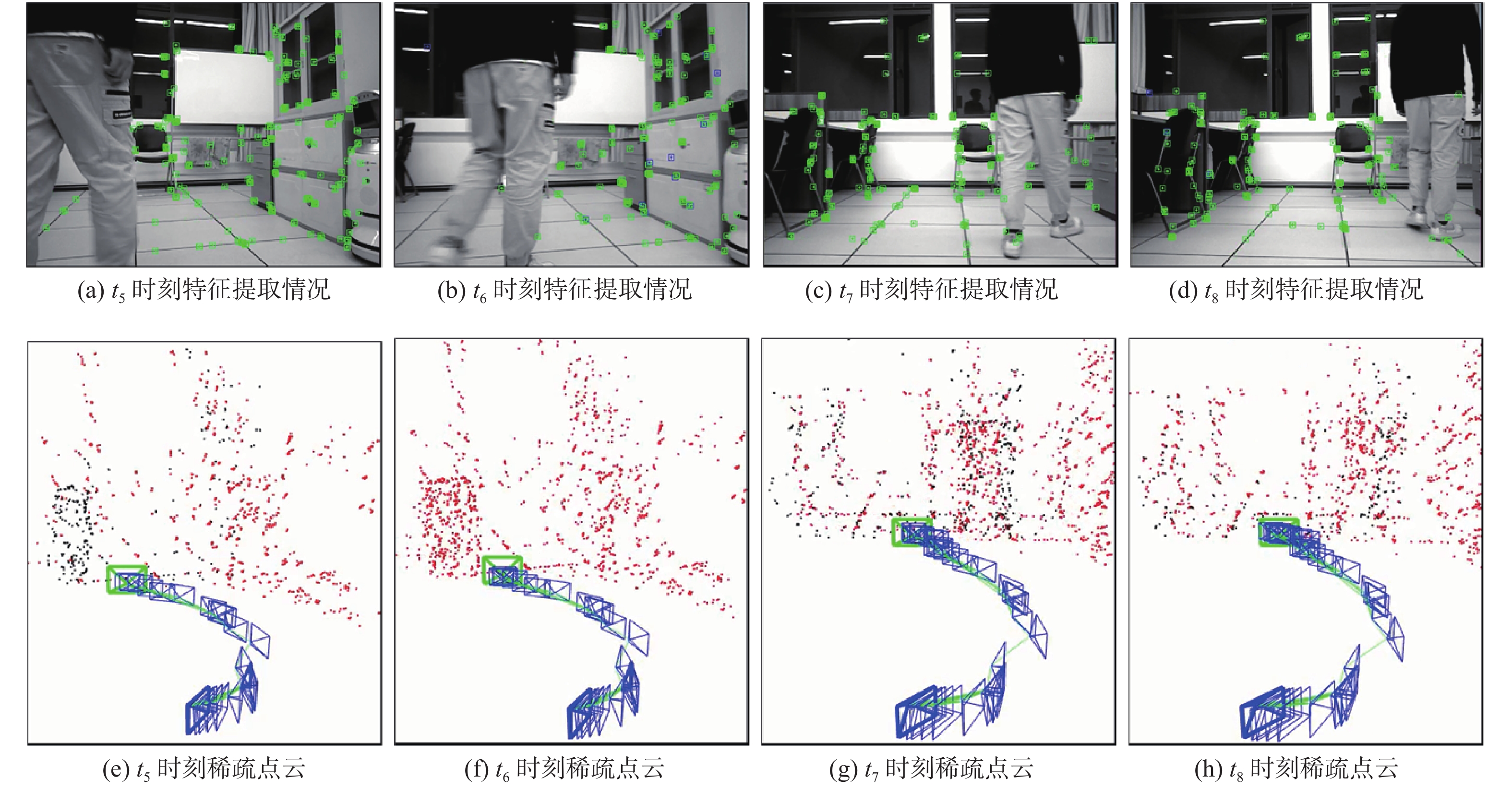
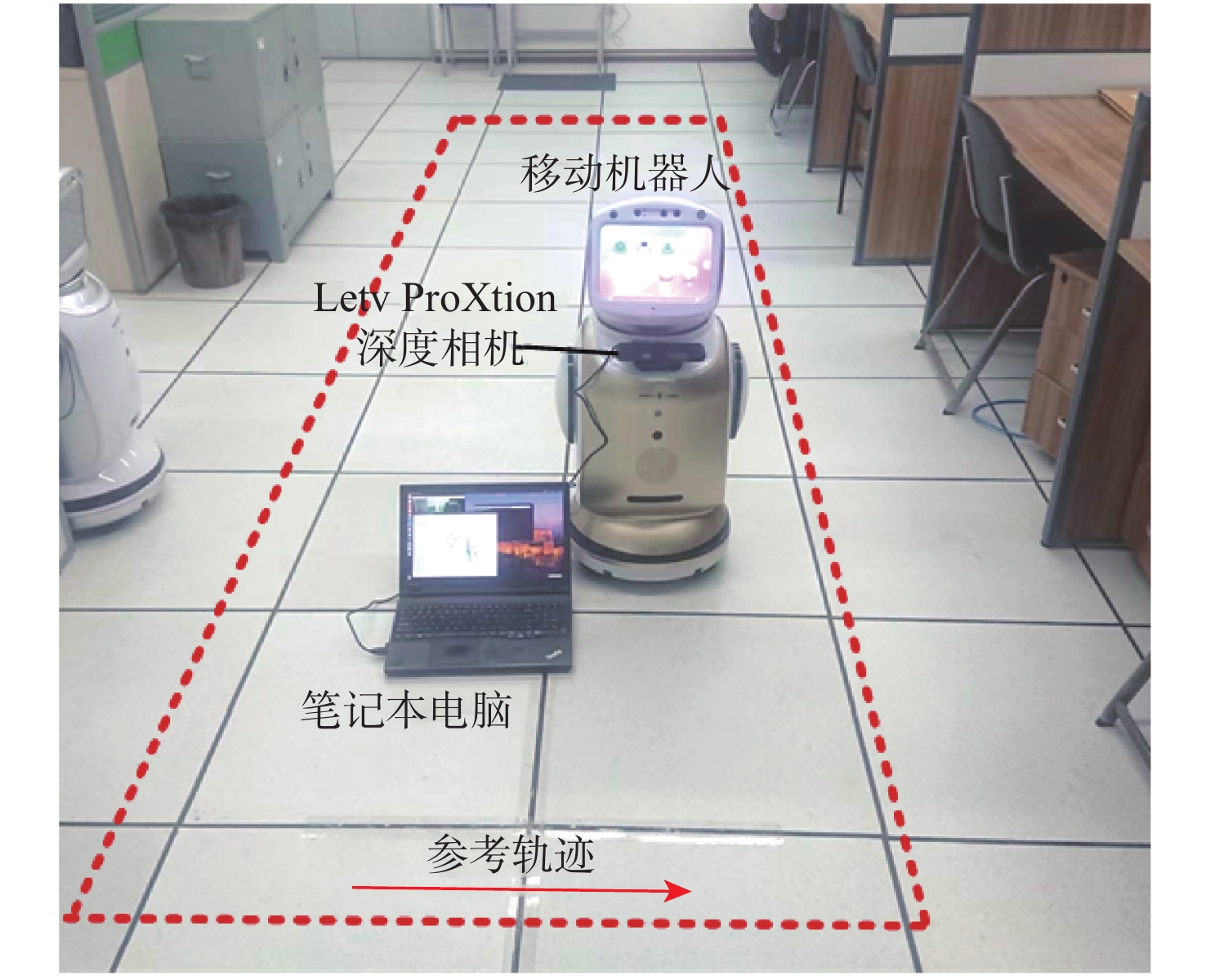
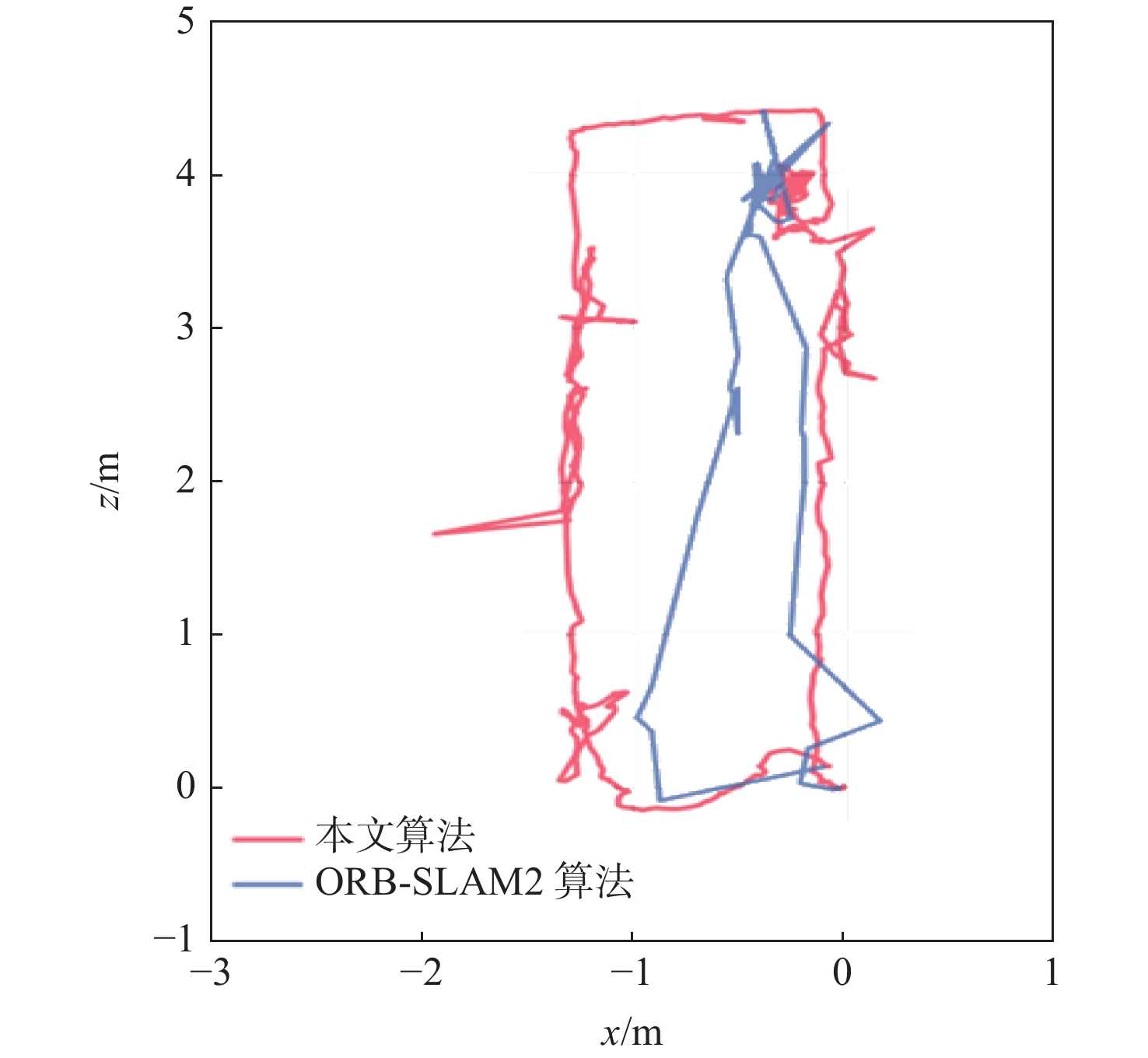
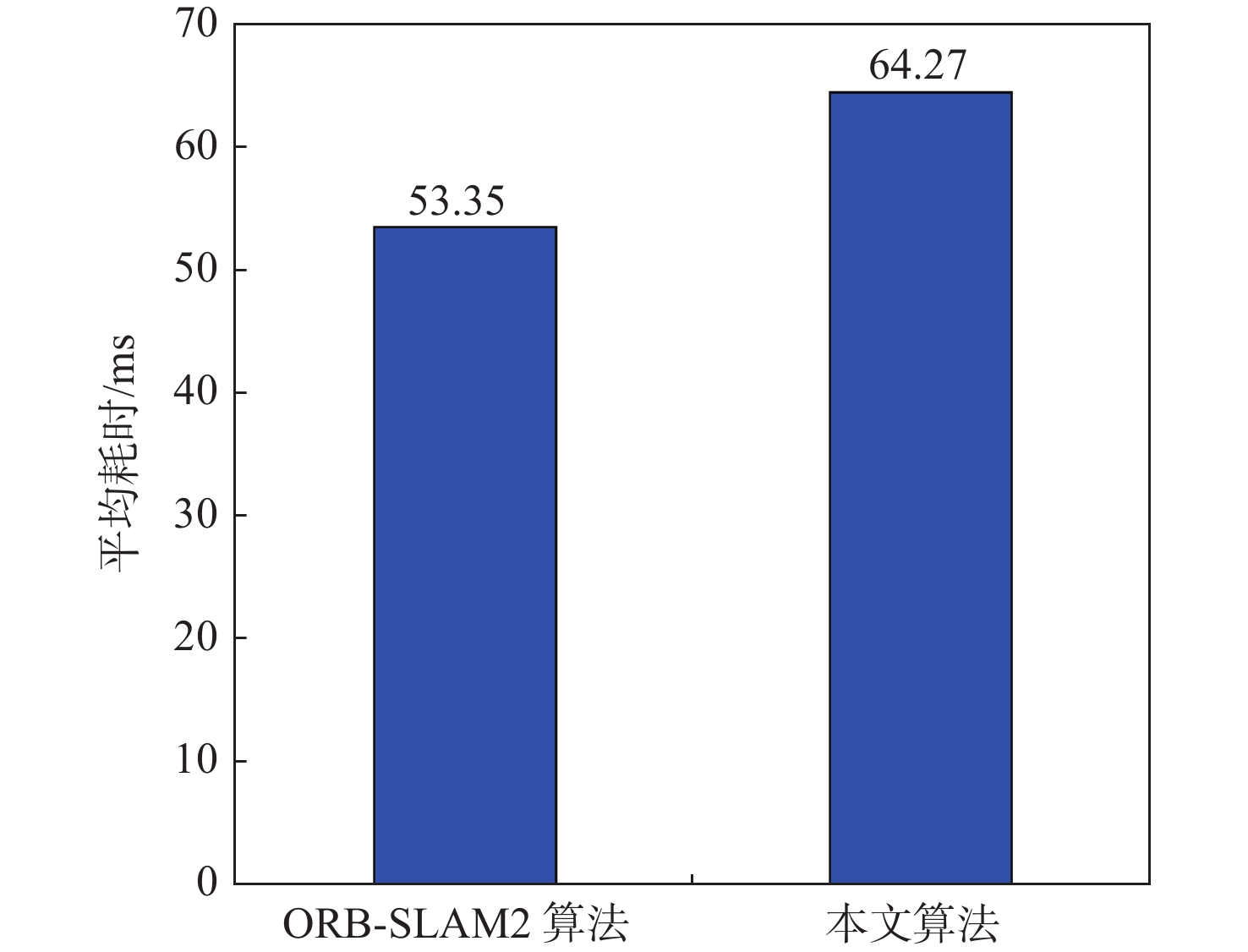
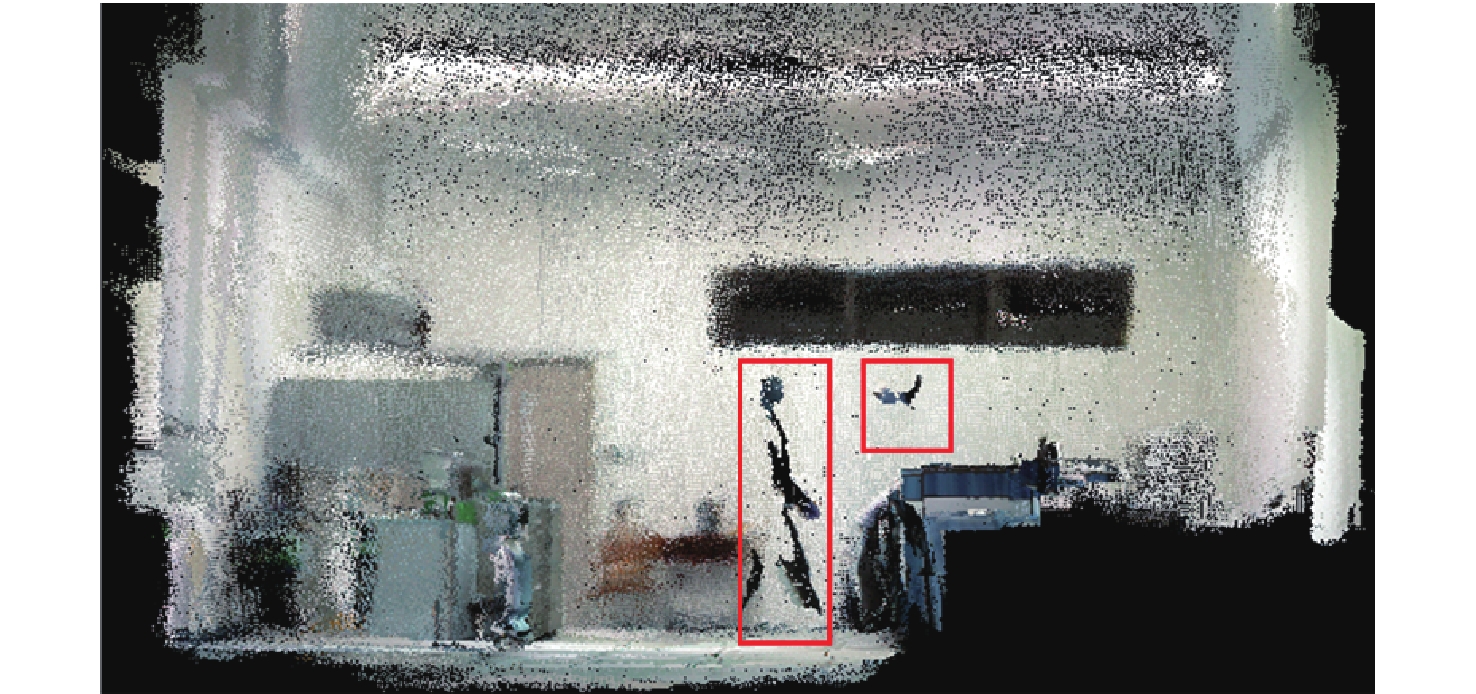
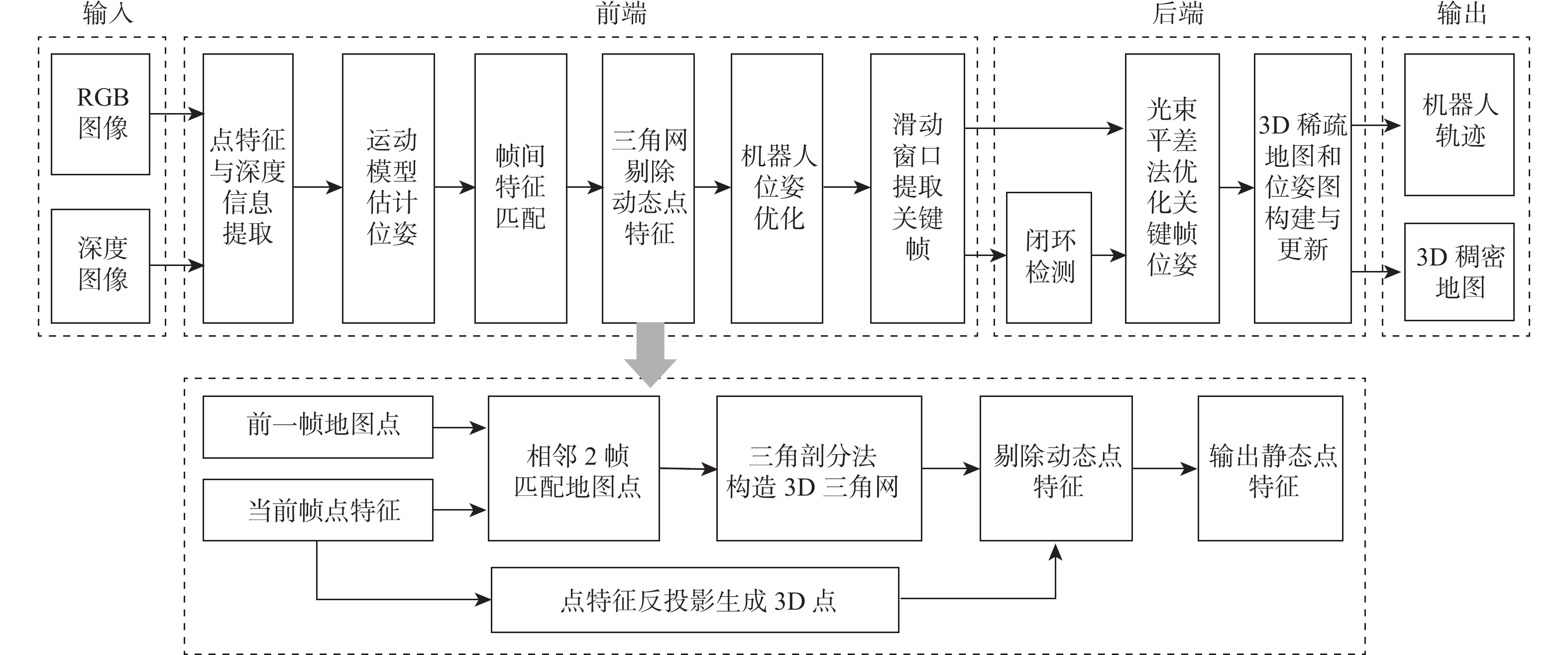
The dynamic objects will cause a large number of dynamic errors in the pose estimation of robots in dynamic scenarios. To address this issue, a 3D simultaneous localization and mapping (SLAM) algorithm for mobile robots was presented by using geometric constraints between feature points to eliminate dynamic feature points. First, the ORB feature points of the current frame and the map points generated by feature points of the previous frame were used for projection matching, and the Delaunay triangulation method was introduced to construct a triangle net that could represent the geometric relationship between the matching map points of the two frames. Then, the dynamic feature points were detected according to the geometric relationship changes of the map points in the adjacent two frames. Since the static feature points may be incorrectly detected as dynamic feature points, which thus brings about the loss of feature points, more feature points were extracted during the matching of the adjacent two frames, so as to compensate for static feature points. Then, the dynamic feature points were eliminated, and the pose of the mobile robots was estimated accurately. On this basis, a sliding window was introduced to extract key frames and complete closed-loop detection, and thus an accurate 3D dense map was constructed. The results of simulation experiments on multiple sets of public datasets and the experiments in the indoor dynamic scenarios show that the proposed algorithm in this paper can effectively eliminate the dynamic feature points and improve the accuracy of the pose estimation of mobile robots in dynamic scenarios and the consistency of the map.

| [1] |
FISCHLER M A, BOLLES R C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography[M]//FISCHLER M A, FIRSCHEIN O. Readings in computer vision. Amsterdam: Elsevier, 1987: 726-740.
|
| [2] |
STRASDAT H, MONTIEL J M M, DAVISON A J. Visual SLAM: Why filter?[J]. Image and Vision Computing, 2012, 30(2): 65-77. doi: 10.1016/j.imavis.2012.02.009
|
| [3] |
ZOU D P, TAN P. CoSLAM: Collaborative visual SLAM in dynamic environments[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2013, 35(2): 354-366. doi: 10.1109/TPAMI.2012.104
|
| [4] |
张慧娟, 方灶军, 杨桂林. 动态环境下基于线特征的RGB-D视觉里程计[J]. 机器人, 2019, 41(1): 75-82.
ZHANG H J, FANG Z J, YANG G L. RGB-D visual odometry in dynamic environments using line features[J]. Robot, 2019, 41(1): 75-82(in Chinese).
|
| [5] |
RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: An efficient alternative to SIFT or SURF[C]//Proceedings of the International Conference on Computer Vision. Piscataway: IEEE Press, 2011: 2564-2571.
|
| [6] |
VON GIOI R G, JAKUBOWICZ J, MOREL J M, et al. LSD: A line segment detector[J]. Image Processing On Line, 2012, 2: 35-55. doi: 10.5201/ipol.2012.gjmr-lsd
|
| [7] |
SUN Y X, LIU M, MENG M Q H. Improving RGB-D SLAM in dynamic environments: A motion removal approach[J]. Robotics and Autonomous Systems, 2017, 89: 110-122. doi: 10.1016/j.robot.2016.11.012
|
| [8] |
艾青林, 刘刚江, 徐巧宁. 动态环境下基于改进几何与运动约束的机器人RGB-D SLAM算法[J]. 机器人, 2021, 43(2): 167-176.
AI Q L, LIU G J, XU Q N. An RGB-D SLAM algorithm for robot based on the improved geometric and motion constraints in dynamic environment[J]. Robot, 2021, 43(2): 167-176(in Chinese).
|
| [9] |
LI S L, LEE D. RGB-D SLAM in dynamic environments using static point weighting[J]. IEEE Robotics and Automation Letters, 2017, 2(4): 2263-2270. doi: 10.1109/LRA.2017.2724759
|
| [10] |
高成强, 张云洲, 王晓哲, 等. 面向室内动态环境的半直接法RGB-D SLAM算法[J]. 机器人, 2019, 41(3): 372-383.
GAO C Q, ZHANG Y Z, WANG X Z, et al. Semi-direct RGB-D SLAM algorithm for dynamic indoor environments[J]. Robot, 2019, 41(3): 372-383(in Chinese).
|
| [11] |
DEROME M, PLYER A, SANFOURCHE M, et al. Real-time mobile object detection using stereo[C]//Proceedings of the 13th International Conference on Control Automation Robotics & Vision. Piscataway: IEEE Press, 2014: 1021-1026.
|
| [12] |
LI X Z, XU C L. Moving object detection in dynamic scenes based on optical flow and superpixels[C]//Proceedings of the IEEE International Conference on Robotics and Biomimetics. Piscataway: IEEE Press, 2015: 84-89.
|
| [13] |
JAIMEZ M, KERL C, GONZALEZ-JIMENEZ J, et al. Fast odometry and scene flow from RGB-D cameras based on geometric clustering[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2017: 3992-3999.
|
| [14] |
DAI W C, ZHANG Y, LI P, et al. RGB-D SLAM in dynamic environments using point correlations[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(1): 373-389. doi: 10.1109/TPAMI.2020.3010942
|
| [15] |
BARBER C B, DOBKIN D P, HUHDANPAA H. The quickhull algorithm for convex hulls[J]. ACM Transactions on Mathematical Software, 1996, 22(4): 469-483. doi: 10.1145/235815.235821
|
| [16] |
STURM J, ENGELHARD N, ENDRES F, et al. A benchmark for the evaluation of RGB-D SLAM systems[C]//Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2012: 573-580.
|
| [17] |
MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: An open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. doi: 10.1109/TRO.2017.2705103
|
| [18] |
GRUPP M. EVO: Python package for the evaluation of odometry and SLAM[EB/OL]. (2017-09-14)[2022-04-28]. https://michaelgrupp.github.io/evo/.
|
| [19] |
KERL C, STURM J, CREMERS D. Robust odometry estimation for RGB-D cameras[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2013: 3748-3754.
|
| [20] |
KIM D H, KIM J H. Effective background model-based RGB-D dense visual odometry in a dynamic environment[J]. IEEE Transactions on Robotics, 2016, 32(6): 1565-1573. doi: 10.1109/TRO.2016.2609395
|
| [21] |
ZHONG F W, WANG S, ZHANG Z Q, et al. Detect-SLAM: Making object detection and SLAM mutually beneficial[C]//Proceedings of the IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE Press, 2018: 1001-1010.
|
Figures(15) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: