| Citation: | LU M M,LIU C H,DONG Z L. Dynamic communication resource allocation for multi-UAV area coverage[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(9):2939-2950 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0745

|
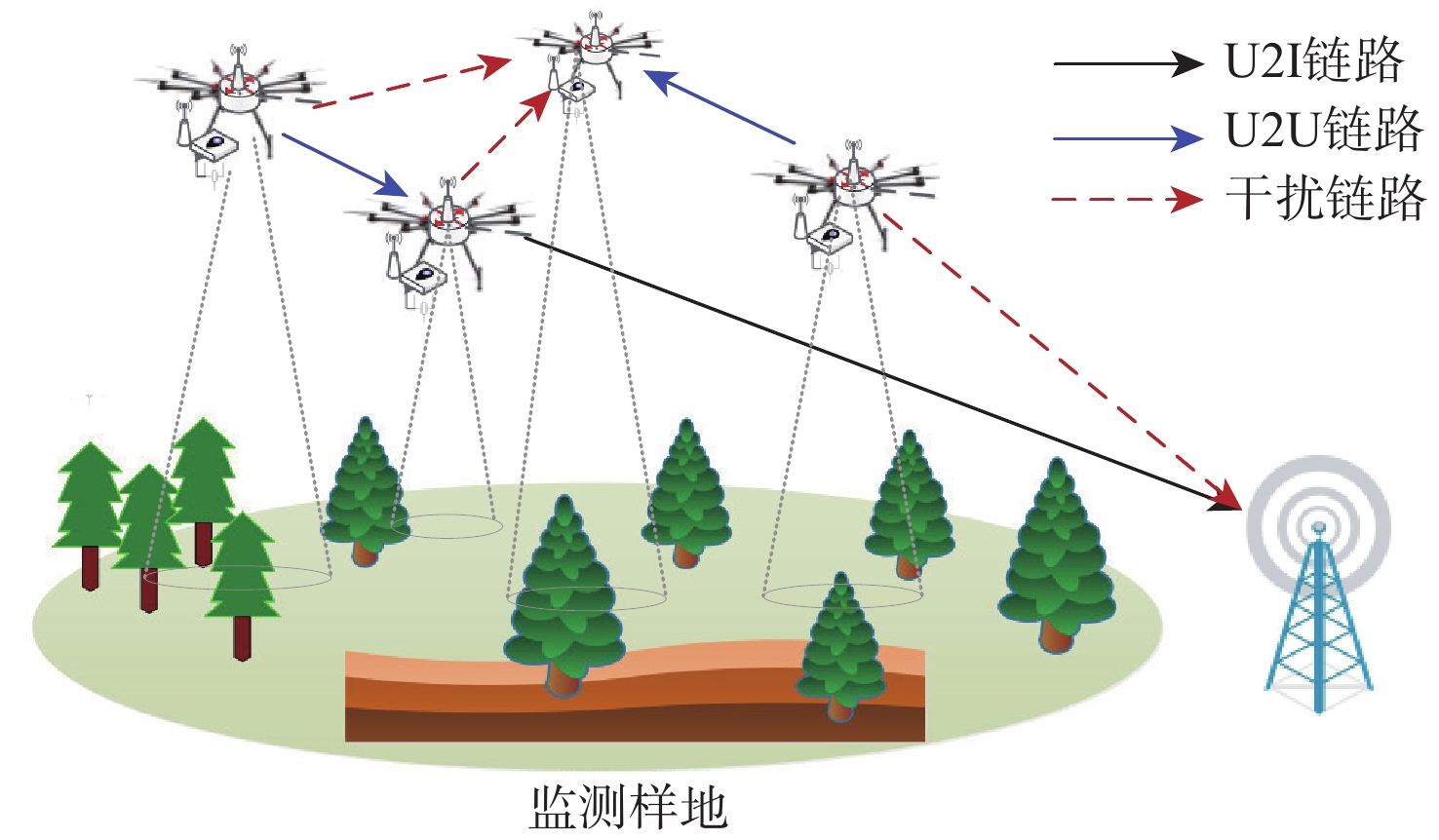
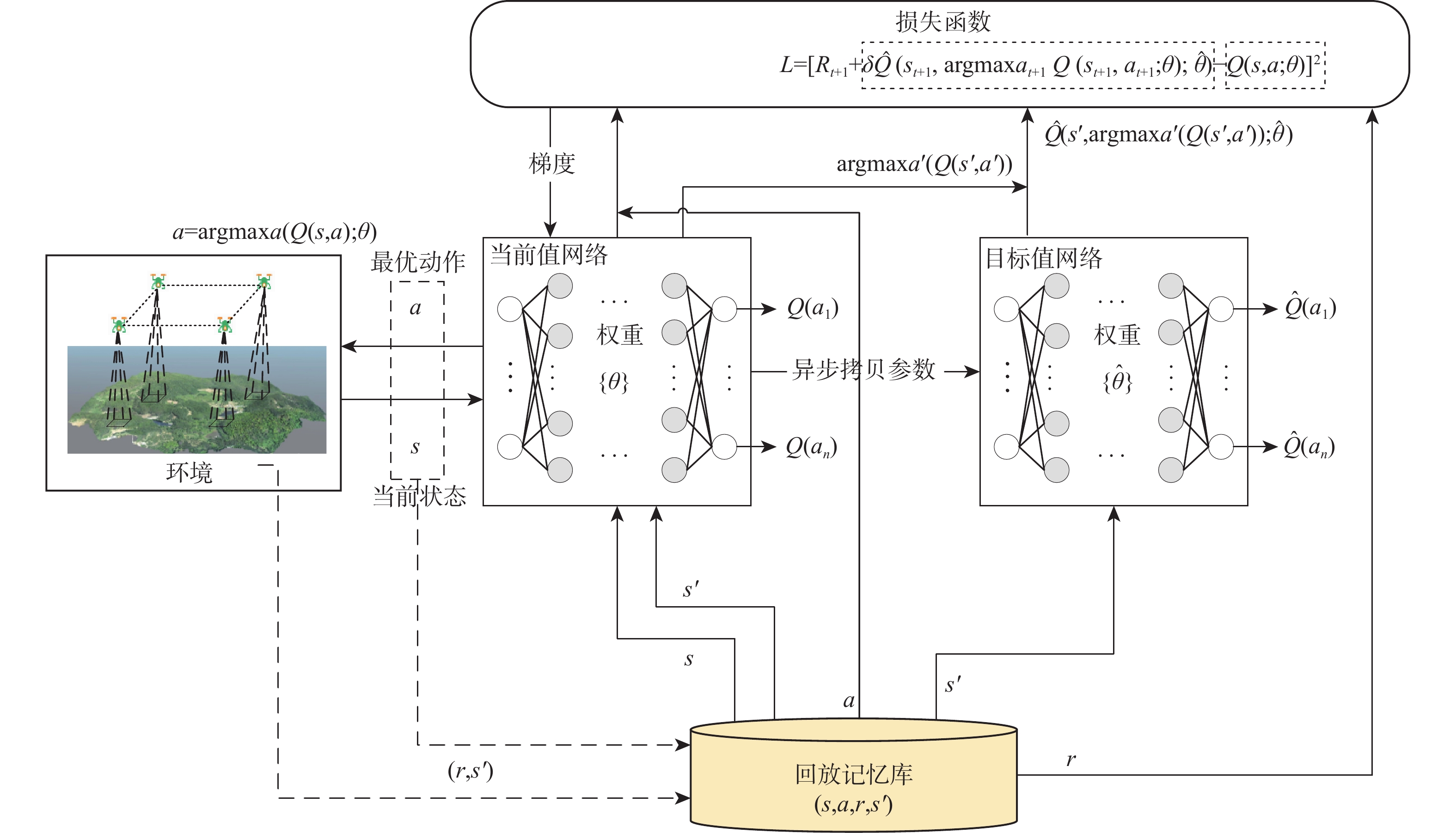
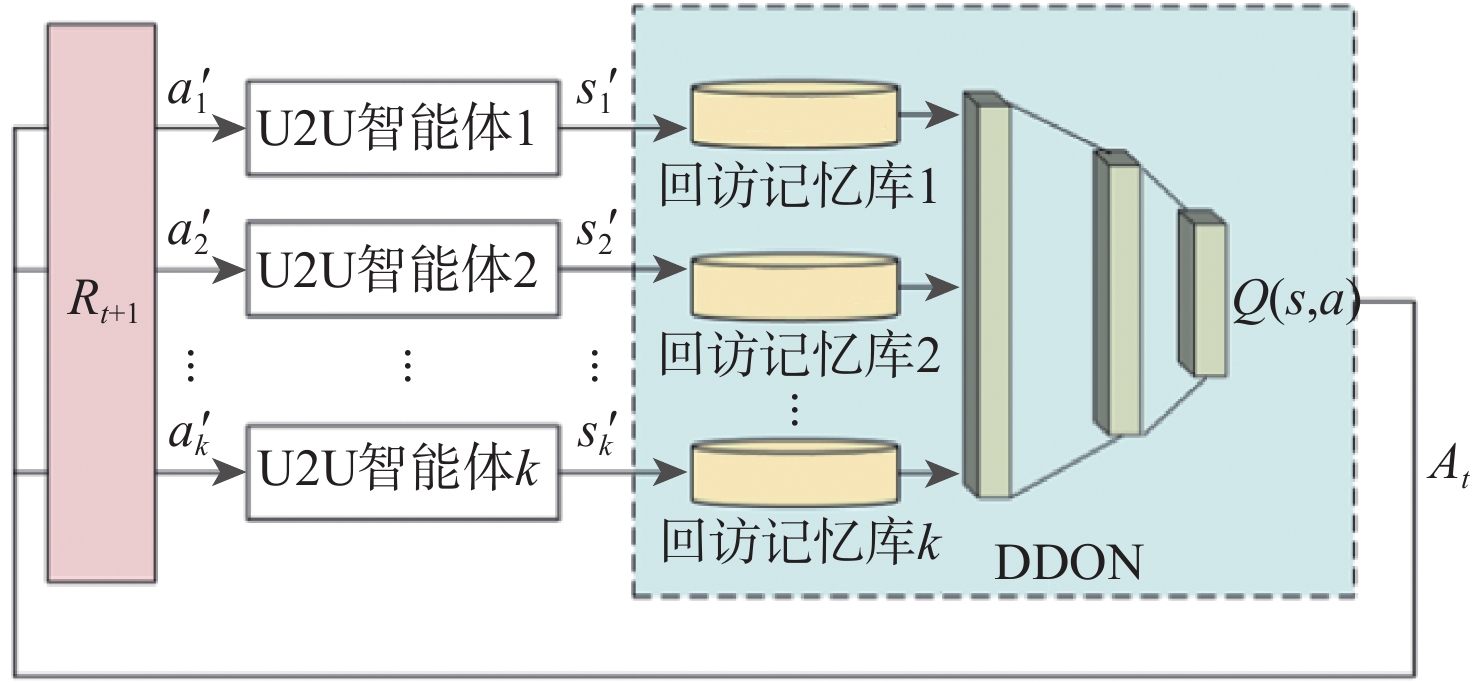
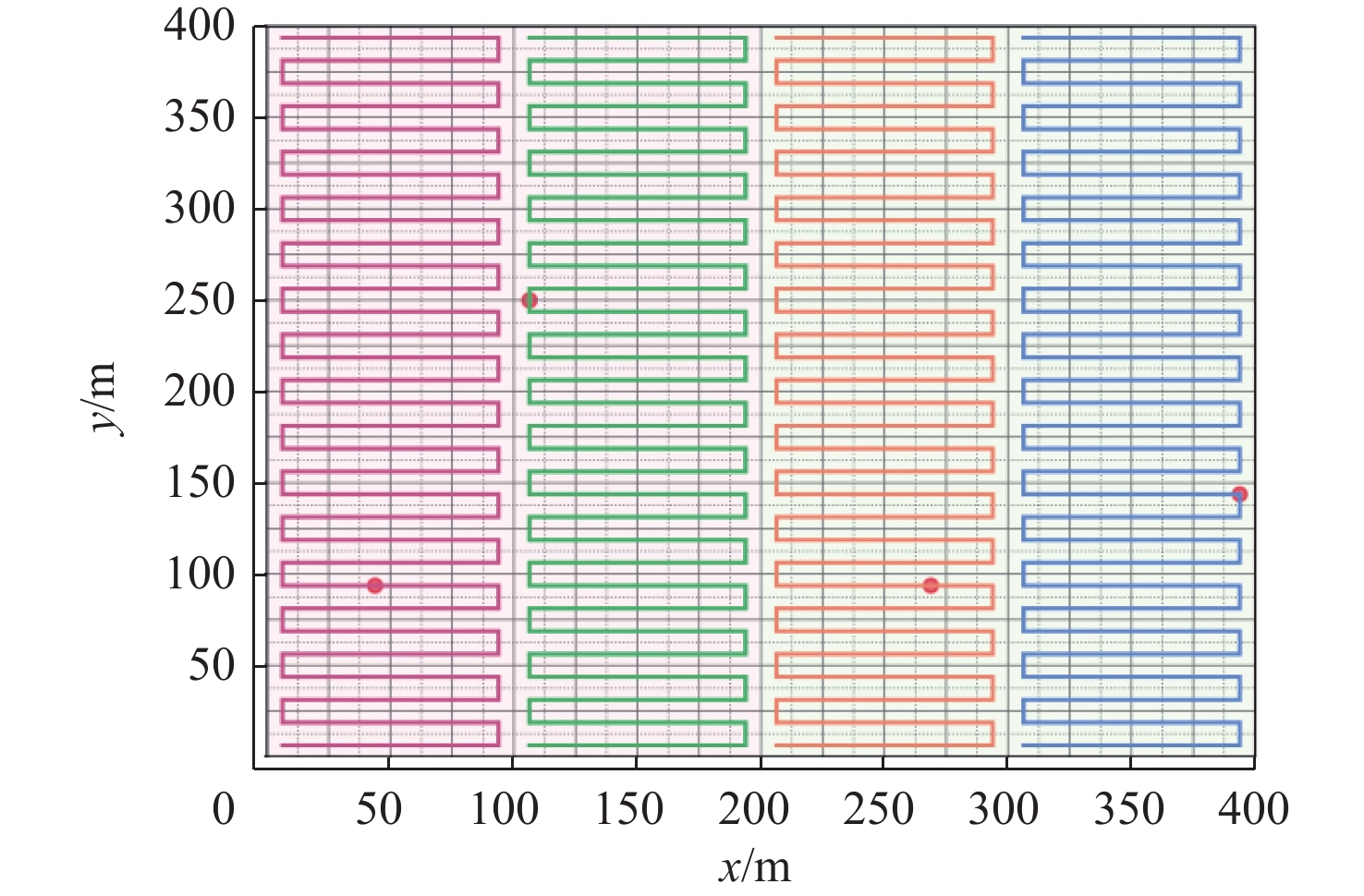
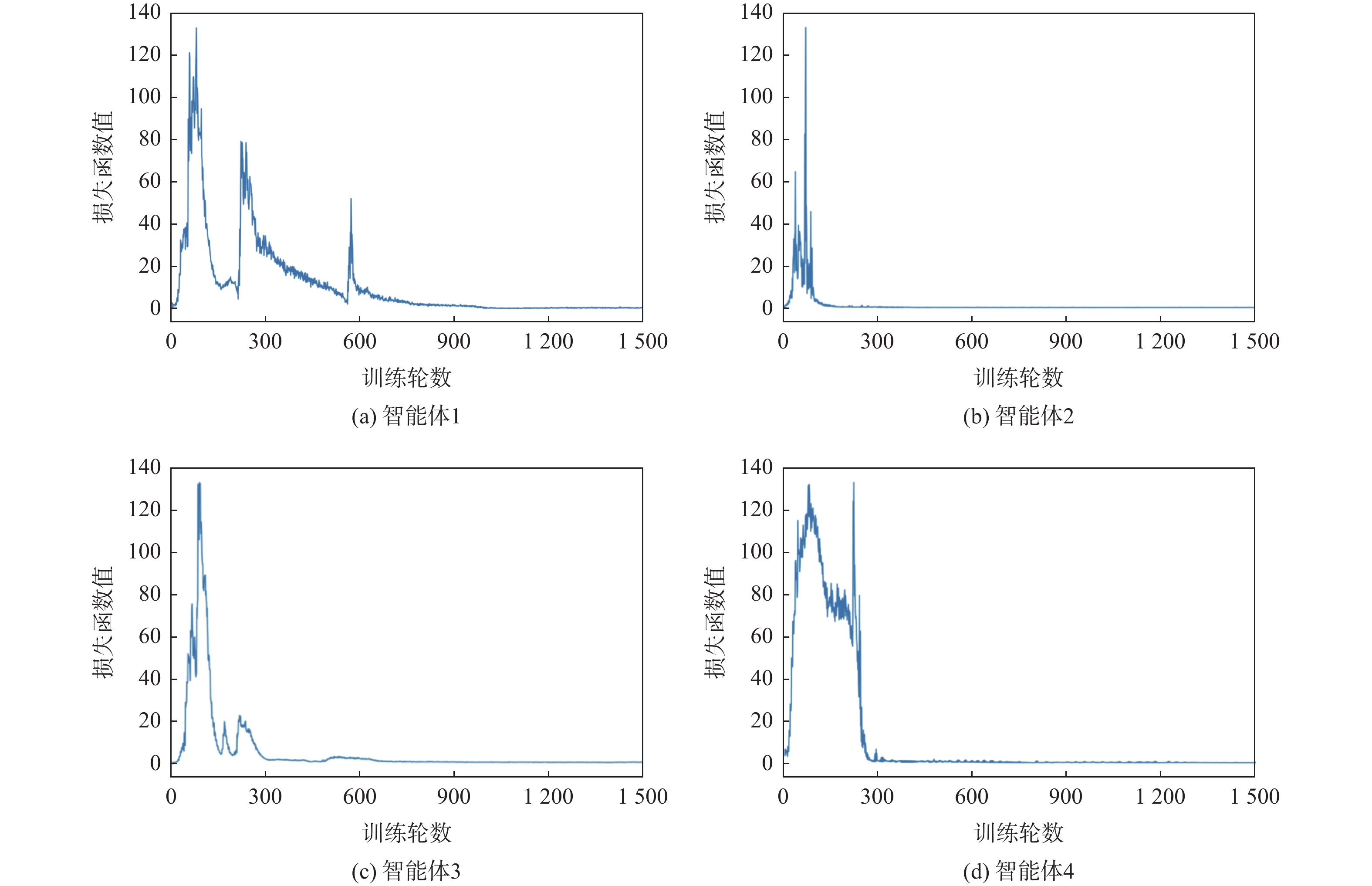
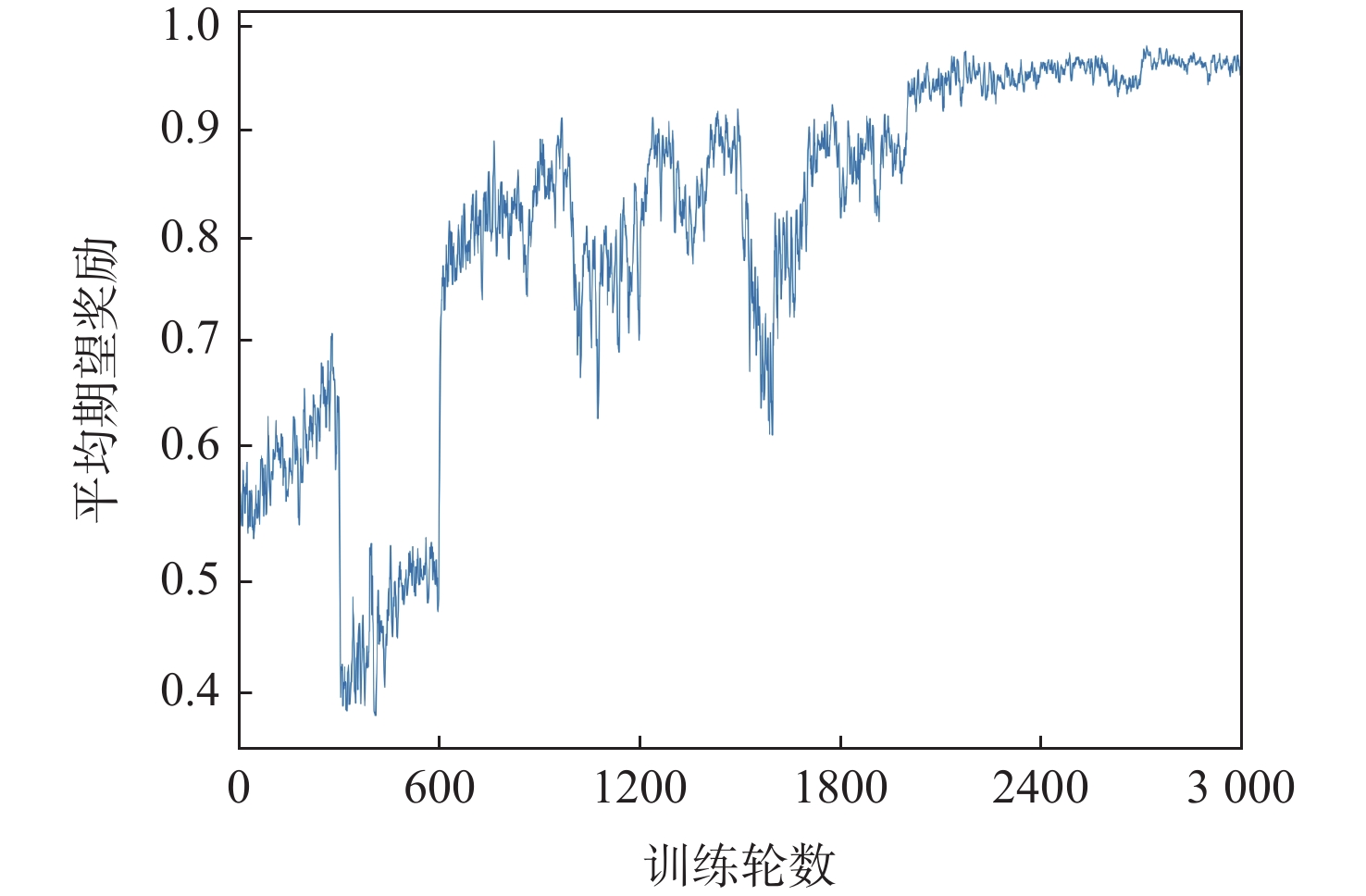
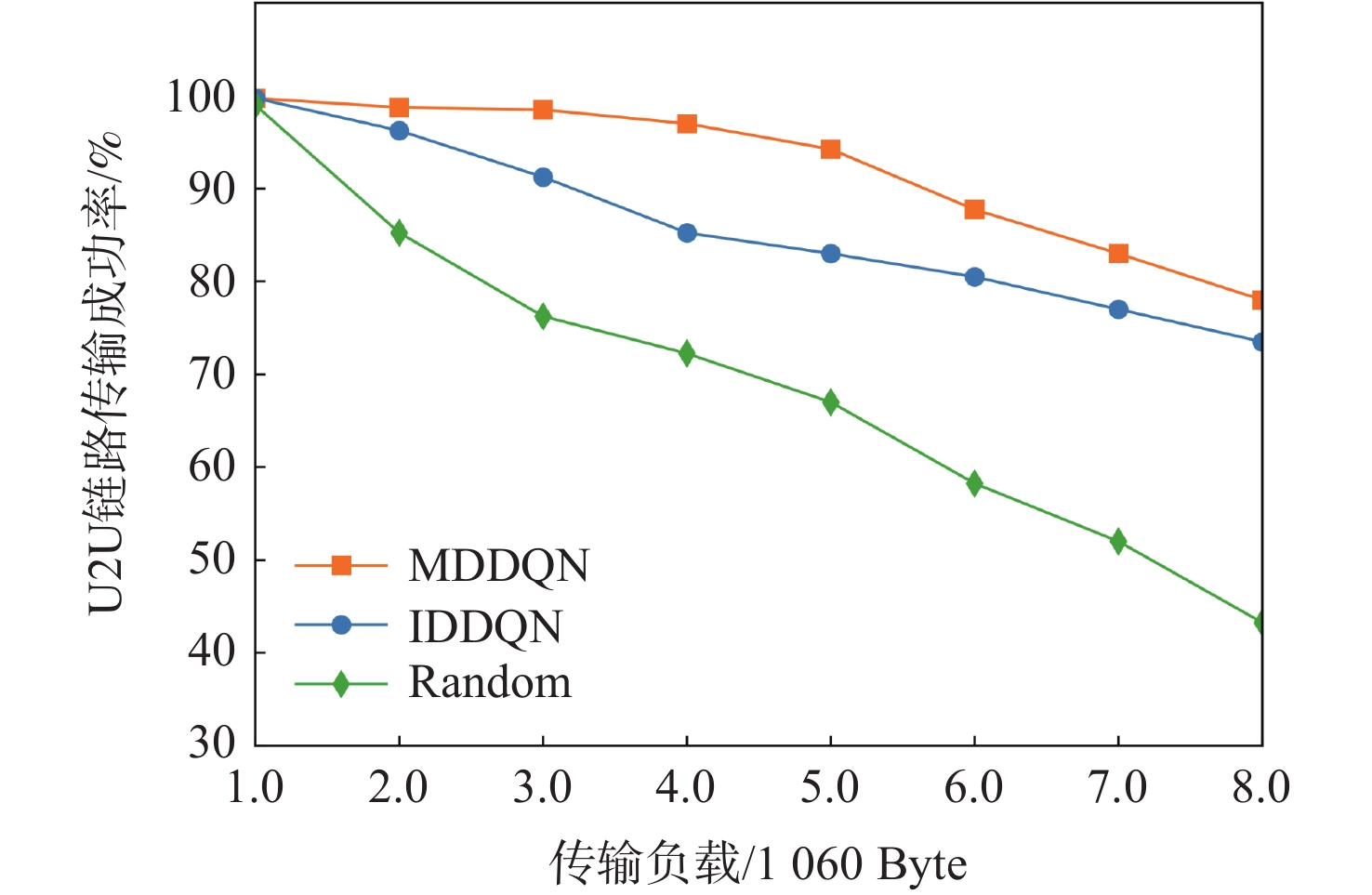
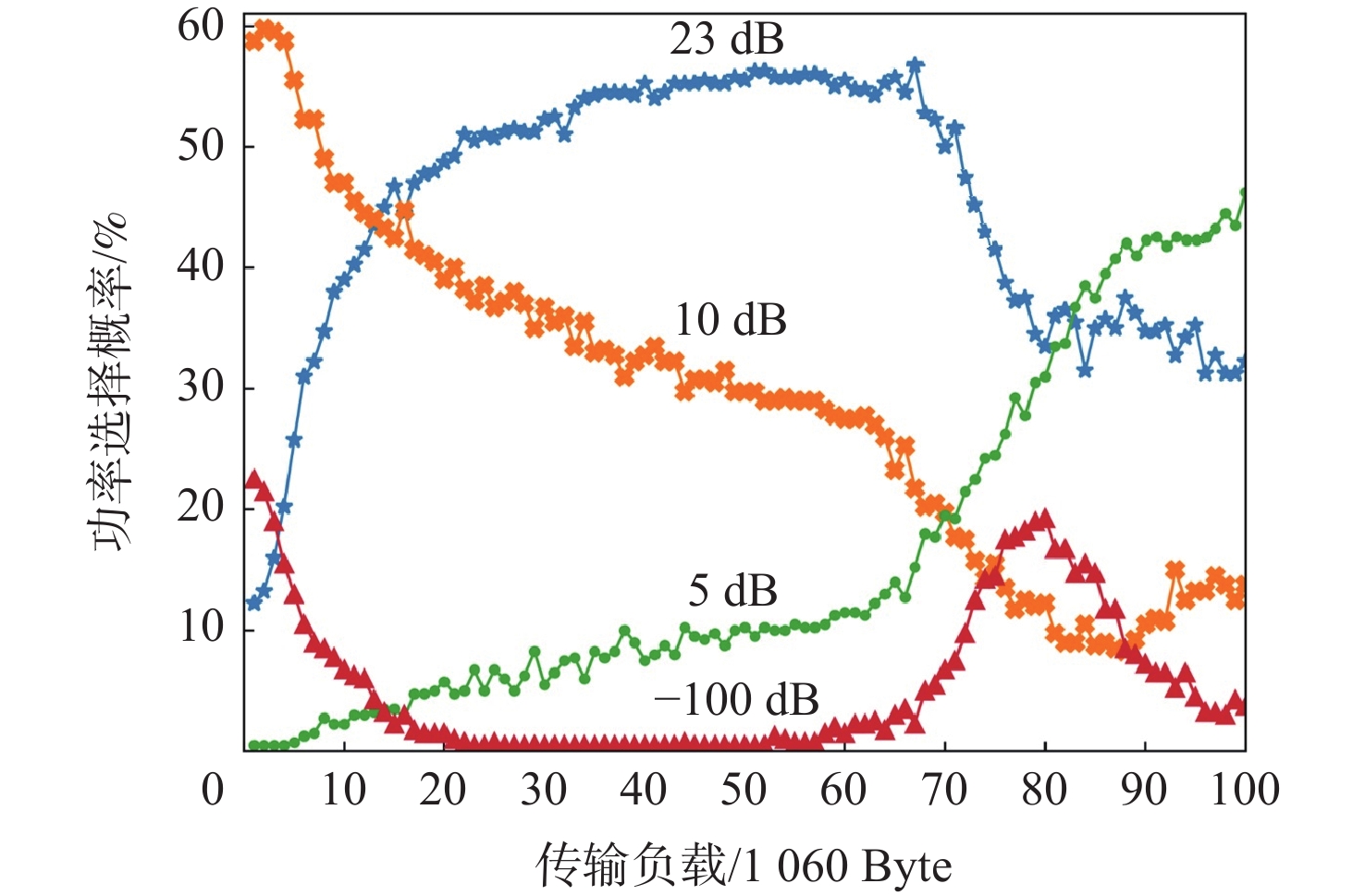
This study presents a reinforcement learning-based multi-agent dynamic communication resource allocation model that addresses the issue of communication resource allocation in multi-UAV area coverage tasks. We first generate the coverage route of each UAV in the mission area by the multi-agent spanning tree coverage (MSTC) method, and model the communication link between the UAV and ground base station as well as UAV pairs. The uncertainty inherent in the flight environment motivates the modeling of the long-term resource allocation problem as a random game. T Considered an agent, the air-to-air connection between UAVs entails receiver, subchannel, and transmission power selection, among other modifications. We then design a multi-agent reinforcement learning (MARL) model based on the double deep Q-network (DDQN), where each agent learns the optimal communication resource allocation strategy through the feedback of the reward function. As shown by simulation results, the proposed MARL method can increase the overall channel capacity, decrease interference from air-to-ground uplink, and optimize communication resource allocation strategies under dynamic trajectories and delay constraints, while also improving the success rate of load delivery.

| [1] |
HANSCOM A F B, BEDFORD M A. Unmanned aircraft system (UAS) service demand 2015-2035: Literature review & projections of future usage[R]. Washington: Department of Transportation, 2013.
|
| [2] |
李艳庆. 基于遗传算法和深度强化学习的多无人机协同区域监视的航路规划[D]. 西安: 西安电子科技大学, 2018.
LI Y Q. Cooperative path planning for region surveillance of multi-UAV based on genetic algorithm and deep reinforcement learning[D]. Xi’an: Xidian University, 2018(in Chinese).
|
| [3] |
赵林, 张宇飞, 姚明旿, 等. 无人机集群协同技术发展与展望[J]. 无线电工程, 2021, 51(8): 823-828. doi: 10.3969/j.issn.1003-3106.2021.08.023
ZHAO L, ZHANG Y F, YAO M W, et al. Development and trend of UAV swarm cooperative techniques[J]. Radio Engineering, 2021, 51(8): 823-828(in Chinese). doi: 10.3969/j.issn.1003-3106.2021.08.023
|
| [4] |
刘立辉, 赵彦杰, 赵小虎, 等. 一种无人集群系统仿真平台设计[J]. 中国电子科学研究院学报, 2017, 12(5): 506-512. doi: 10.3969/j.issn.1673-5692.2017.05.013
LIU L H, ZHAO Y J, ZHAO X H, et al. Design of a simulation platform of unmanned swarm system[J]. Journal of China Academy of Electronics and Information Technology, 2017, 12(5): 506-512(in Chinese). doi: 10.3969/j.issn.1673-5692.2017.05.013
|
| [5] |
BUCAILLE I, HÉTHUIN S, MUNARI A, et al. Rapidly deployable network for tactical applications: aerial base station with opportunistic links for unattended and temporary events ABSOLUTE example[C]//2013 IEEE Military Communications Conference. Piscataway: IEEE Press, 2013: 1116-1120.
|
| [6] |
XIAO Z Y, XIA P F, XIA X G. Enabling UAV cellular with millimeter-wave communication: potentials and approaches[J]. IEEE Communications Magazine, 2016, 54(5): 66-73. doi: 10.1109/MCOM.2016.7470937
|
| [7] |
JIANG B, YANG J C, XU H F, et al. Multimedia data throughput maximization in internet-of-things system based on optimization of cache-enabled UAV[J]. IEEE Internet of Things Journal, 2019, 6(2): 3525-3532. doi: 10.1109/JIOT.2018.2886964
|
| [8] |
MARDANI A, CHIABERGE M, GIACCONE P. Communication-aware UAV path planning[J]. IEEE Access, 2019, 7: 52609-52621. doi: 10.1109/ACCESS.2019.2911018
|
| [9] |
ZHAN C, HU H, SUI X F, et al. Joint resource allocation and 3D aerial trajectory design for video streaming in UAV communication systems[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2021, 31(8): 3227-3241. doi: 10.1109/TCSVT.2020.3035618
|
| [10] |
胡欣颖. 面向信息采集场景的无人机轨迹规划与通信资源分配研究[D]. 北京: 北京邮电大学, 2021: 8-19.
HU X Y. Trajectory design and resource allocation of uav for data collection in WSNs[D]. Beijing: Beijing University of Posts and Telecommunications, 2021: 8-19(in Chinese).
|
| [11] |
MANZOOR A, KIM D H, HONG C S. Energy efficient resource allocation in UAV-based heterogeneous networks[C]// 2019 20th Asia-Pacific Network Operations and Management Symposium. Piscataway: IEEE Press, 2019: 1-4.
|
| [12] |
ZENG F Z, HU Z Z, XIAO Z, et al. Resource allocation and trajectory optimization for QoE provisioning in energy-efficient UAV-enabled wireless networks[J]. IEEE Transactions on Vehicular Technology, 2020, 69(7): 7634-7647. doi: 10.1109/TVT.2020.2986776
|
| [13] |
LU W D, SI P Y, HUANG G X, et al. Interference reducing and resource allocation in UAV-powered wireless communication system[C]// 2020 International Wireless Communications and Mobile Computing. Piscataway: IEEE Press, 2020: 220-224.
|
| [14] |
陶丽佳, 赵宜升, 徐新雅. 无人机协助边缘计算的能量收集MEC系统资源分配策略[J]. 南京邮电大学学报(自然科学版), 2022, 42(1): 37-44.
TAO L J, ZHAO Y S, XU X Y. Resource allocation strategy for UAV-assisted edge computing in energy harvesting MEC system[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science Edition), 2022, 42(1): 37-44(in Chinese).
|
| [15] |
QIN X T, SONG Z Y, HAO Y Y, et al. Joint resource allocation and trajectory optimization for multi-UAV-assisted multi-access mobile edge computing[J]. IEEE Wireless Communications Letters, 2021, 10(7): 1400-1404. doi: 10.1109/LWC.2021.3068793
|
| [16] |
龚广伟, 谢添, 赵海涛, 等. 基于图着色的大规模无人机群三维网络资源分配算法[J]. 信号处理, 2022, 38(8): 1693-1702.
GONG G W, XIE T, ZHAO H T, et al. A three-dimension resources allocation algorithm for large-scale UAV network based on graph coloring[J]. Journal of Signal Processing, 2022, 38(8): 1693-1702(in Chinese).
|
| [17] |
吴启晖, 陈佳馨, 吴盛君, 等. 一种基于动态航迹的无人机群频谱资源分配方法: CN108632831A[P]. 2021-08-10.
WU Q H, CHEN J X, WU S J, et al. A dynamic trajectory-based spectrum resource allocation method for UAV swarms: CN108632831A[P]. 2021-08-10(in Chinese).
|
| [18] |
CHEN M Z, SAAD W, YIN C C. Liquid state machine learning for resource allocation in a network of cache-enabled LTE-U UAVs[C]//2017 IEEE Global Communications Conference. Piscataway: IEEE Press, 2017: 1-6.
|
| [19] |
CHEN J X, WU Q H, XU Y H, et al. Distributed demand-aware channel-slot selection for multi-UAV networks: a game-theoretic learning approach[J]. IEEE Access, 2018, 6: 14799-14811. doi: 10.1109/ACCESS.2018.2811372
|
| [20] |
ZHANG X C, ZHAO H T, XIONG J, et al. Scalable power control/beamforming in heterogeneous wireless networks with graph neural networks[C]// 2021 IEEE Global Communications Conference. Piscataway: IEEE Press, 2021: 1-6.
|
| [21] |
贺颖. 基于深度强化学习的无线网络多维资源分配技术研究[D]. 大连: 大连理工大学, 2018.
HE Y. Research on multi-dimensional resource allocation of wireless networks based on deep reinforcement learning[D]. Dalian: Dalian University of Technology, 2018(in Chinese).
|
| [22] |
ZHANG Q Q, MOZAFFARI M, SAAD W, et al. Machine learning for predictive on-demand deployment of uavs for wireless communications[C]// 2018 IEEE Global Communications Conference. Piscataway: IEEE Press, 2018: 1-6.
|
| [23] |
SUN N, WU J X. Minimum error transmissions with imperfect channel information in high mobility systems[C]//2013 IEEE Military Communications Conference. Piscataway: IEEE Press, 2013: 922-927.
|
| [24] |
CHUA M Y K, YU F R, LI J, et al. Medium access control for unmanned aerial vehicle (UAV) ad-hoc networks with full-duplex radios and multipacket reception capability[J]. IEEE Transactions on Vehicular Technology, 2013, 62(1): 390-394. doi: 10.1109/TVT.2012.2211905
|
| [25] |
任博, 刘圣宇, 崔连柱, 等. 多无人机侦察航路规划[C]// 2014(第五届)中国无人机大会论文集. 北京: 航空工业出版社, 2014: 793-797.
REN B, LIU S Y, CUI L Z, et al. Multi-UAV reconnaissance route planning[C]//Proceedings of China Drone Conference. Beijing: Aviation Industry Press, 2014: 793-797(in Chinese).
|
| [26] |
ACEVEDO J J, ARRUE B C, MAZA I, et al. Distributed cooperation of multiple UAVs for area monitoring missions[M]//CARBONE G, GOMEZ-BRAVO F. Motion and Operation Planning of Robotic Systems. Cham: Springer, 2015: 471-494.
|
| [27] |
张睿文, 宋笔锋, 裴扬, 等. 复杂任务场景无人机集群自组织侦察建模与仿真[J]. 航空工程进展, 2020, 11(3): 316-325,343.
ZHANG R W, SONG B F, PEI Y, et al. Modelling and simulation of UAV swarm self-organized surveillance in complex mission scenarios[J]. Advances in Aeronautical Science and Engineering, 2020, 11(3): 316-325,343(in Chinese).
|
| [28] |
HAZON N, KAMINKA G A. On redundancy, efficiency, and robustness in coverage for multiple robots[J]. Robotics and Autonomous Systems, 2008, 56(12): 1102-1114. doi: 10.1016/j.robot.2008.01.006
|
| [29] |
GABRIELY Y, RIMON E. Spanning-tree based coverage of continuous areas by a mobile robot[C]// Proceedings 2001 ICRA. IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2001: 1927-1933.
|
| [30] |
3GPP. Study on enhanced LTE support for aerial vehicles: TR 36.777[S]. Nice, France: ETSI, 2017.
|
| [31] |
3GPP. 5G; Study on channel model for frequencies from 0.5 to 100 GHz: TR 38.901[S]. Nice, France: ETSI, 2020.
|
| [32] |
3GPP. 5G; Unmanned aerial system (UAS) support in 3GPP: TS 22.125[S]. Nice, France: ETSI, 2020.
|
| [33] |
RICE M, DYE R, WELLING K. Narrowband channel model for aeronautical telemetry[J]. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(4): 1371-1376. doi: 10.1109/7.892684
|
| [34] |
GODDEMEIER N, WIETFELD C. Investigation of air-to-air channel characteristics and a UAV specific extension to the rice model[C]// 2015 IEEE Globecom Workshops. Piscataway: IEEE Press, 2015: 1-5.
|
| [35] |
AHMED N, KANHERE S S, JHA S. On the importance of link characterization for aerial wireless sensor networks[J]. IEEE Communications Magazine, 2016, 54(5): 52-57. doi: 10.1109/MCOM.2016.7470935
|
| [36] |
ABUALHAOL I Y, MATALGAH M M. Performance analysis of multi-carrier relay-based UAV network over fading channels[C]// 2010 IEEE Globecom Workshops. Piscataway: IEEE Press, 2010: 1811-1815.
|
| [37] |
GODDEMEIER N, ROHDE S, WIETFELD C. Experimental validation of RSS driven UAV mobility behaviors in IEEE 802.11s networks[C]// 2012 IEEE Globecom Workshops. Piscataway: IEEE Press, 2012: 1550-1555.
|
| [38] |
NOWÉ A, VRANCX P, DE HAUWERE Y M. Game theory and multi-agent reinforcement learning[M]// WIERING M, VAN OTTERLO M. Reinforcement Learning. Berlin: Springer, 2012: 441-470.
|
| [39] |
NEYMAN A. From Markov chains to stochastic games[M]// Stochastic Games and Applications. Dordrecht: Springer Netherlands, 2003: 9-25.
|
| [40] |
SUTTON R S, BARTO A G. Reinforcement learning: an introduction[M]. Cambridge: MIT Press, 1998.
|
| [41] |
TAMPUU A, MATIISEN T, KODELJA D, et al. Multiagent cooperation and competition with deep reinforcement learning[J]. PLoS One, 2017, 12(4): e0172395. doi: 10.1371/journal.pone.0172395
|
Figures(13) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: