TIAN Qiuning, CAO Yueling, HU Xiaogong, et al. Accuracy evaluation of wide-area differential service for BDS-3[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(5): 967-976. doi: 10.13700/j.bh.1001-5965.2020.0108(in Chinese)
Citation:
XU Wen, XIONG Zhiyong, ZHANG Guoquanet al. IMA application development based on Harmony system engineering[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(11): 2067-2077. doi: 10.13700/j.bh.1001-5965.2014.0741(in Chinese)
TIAN Qiuning, CAO Yueling, HU Xiaogong, et al. Accuracy evaluation of wide-area differential service for BDS-3[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(5): 967-976. doi: 10.13700/j.bh.1001-5965.2020.0108(in Chinese)
Citation:
XU Wen, XIONG Zhiyong, ZHANG Guoquanet al. IMA application development based on Harmony system engineering[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(11): 2067-2077. doi: 10.13700/j.bh.1001-5965.2014.0741(in Chinese)
Integration modular avionics (IMA) system application development with Harmony system engineering (SE) modeling method was introduced, Rhapsody was used as the system design tool with Harmony profile to create a software model based on the IMA application requirements, and the system use case diagrams, activity diagrams, sequence diagrams, internal block diagrams and state diagrams were analyzed. With the model, the IMA application development process based on VxWorks 653 operation system(OS)was specified, including module OS build, partition OS build, application build and integration build, and test the IMA application. In module OS build process, it was focused on the development of core OS Makefile. In partition OS build process, it was focused on the development of partition OS configuration table and its Makefile. In application build process, it was focused on the development of application source code, application configuration table and its Makefile. In integration build process, it was focused on the development of module configuration table and its Makefile. The application was tested by loading it into the IMA module, the application's running state was consistent with the Harmony software model.
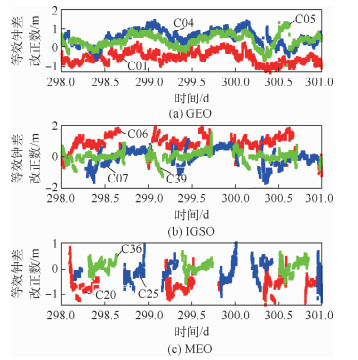
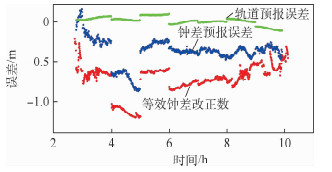
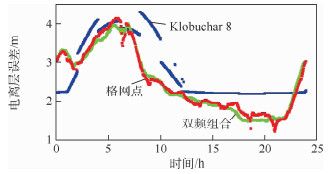
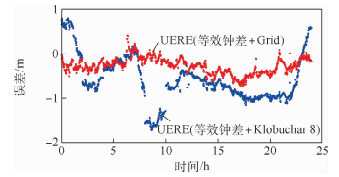
电离层延迟误差采用双频消电离层组合进行消除,而对流层、相对论、天线相位中心等一系列系统误差则通过相应模型进行改正[16]。为了降低伪距多路径误差对参数解算精度的影响,采用CNMC(Code Noise and Multipath Correction)相位平滑伪距方法对伪距观测量进行平滑[17]。这样,在伪距残差观测方程中只剩余了轨道误差、卫星钟差和接收机钟差3项不能有效消除,在北斗广域差分服务中将卫星轨道误差与卫星钟差综合为一体,以等效钟差改正数pcori的形式发播,表示为
Table
5.
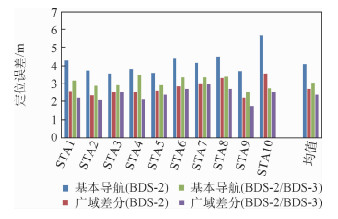
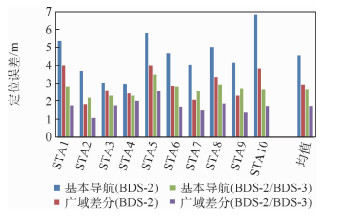
Statistics of single-frequency positioning results on two modes of basic navigation and wide-area differential for single BDS-2 and combination of BDS-2/BDS-3
m
Table
6.
Statistics of dual-frequency positioning results on two modes of basic navigation and wide-area differential for single BDS-2 and combination of BDS-2/BDS-3
m
周庆,刘斌,余正伟,等.综合模块化航电软件仿真测试环境研究[J].航空学报, 2012, 33(4):723-733. Zhou Q, Liu B, Yu Z W, et al.A framework of simulation testing environment for integrated modular avionics software[J].Acta Aeronautica et Astronautica Sinica, 2012, 33(4):722-733(in Chinese).
[2]
张炯,吕紫旭,胡彦彦,等.虚拟化技术在综合化航电系统中的应用[J].北京航空航天大学学报, 2010, 36(2):128-130. Zhang J, Lü Z X, Hu Y Y, et al.Perspective view of virtualization technologies for avionics system[J].Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(2):128-129(in Chinese).
[3]
郑军,刘畅,任占勇.综合模块化航空电子软件测试环境[J].计算机工程与设计, 2011, 32(8):2737-2738. Zheng J, Liu C, Ren Z Y.Integrated modular avionics software testing environment[J].Computer Egineering and Design, 2011, 32(8):2737-2738(in Chinese).
[4]
蒲小勃.现代航空电子系统与综合[M].北京:航空工业出版社, 2013:354-356. Pu X B.Modern avionics system and integration[M].Beijing:Aviation Industry Press, 2013:354-356(in Chinese).
[5]
Hoffman H P.Rational Harmony for systems engineering deskbook, Release 3.1[M].Somers, NY:IBM Software Group, 2010:45-50.
[6]
王安生.软件工程化[M].北京:清华大学出版社, 2014:136-138. Wang A S.Software engineering[M].Beijing:Tsinghua University Press, 2014:136-138(in Chinese).
[7]
张彦,庄锡明.基于模型的开发方法在通信管理模块软件中的应用[J].航空电子技术, 2013, 44(2):31-32. Zhang Y, Zhuang X M.Application of model-based development in communication management module[J].Avionics Technology, 2013, 44(2):31-32(in Chinese).
[8]
RTCA DO-297.Integrated modular avionics (IMA) development guidance and certification considerations[S].Washington, D.C.:RTCA, Inc., 2005:25-28.
张欣毅.XML简明教程[M].北京:清华大学出版社, 2009:86-88. Zhang X Y.A concise course in XML[M].Beijing:Tsinghua University Press, 2009:86-88(in Chinese).
[13]
Wind River System, Inc.Vxworks 653 programmer's guide[EB/OL].Alameda, CA:Wind River Systems, Inc, 2007(2011-03-10)[2014-11-28].
[14]
乔乃强,徐涛,谷青范.ARINC653分区调度算法的研究与改进[J].计算机工程, 2011, 37(20):249-251. Qiao N Q, Xu T, Gu Q F.ARINC653 partition schedule research and improvement[J].Computer Egineering, 2011, 37(20):249-251(in Chinese).
[15]
Aliki Ott.System testing in the avioincs domain[D].Bremen:Bremen University, 2007.
WANG S P,DING X X,LI N,et al. Orientation effect on sealing characteristics of rectangular micro-textured floating ring gas film[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(3):845-856 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0125.
[3]
CAI L,XIAO Y,HAN H Z,et al. Experimental study on flow and heat transfer of hydrocarbon fuels in additive manufacturing channels at supercritical pressure[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(3):881-891 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0120.
LI M H,JIN S,DU Y. Adversarial attack method based on loss smoothing[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(2):663-670 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0478.
WANG Y H,LI Y J,LI H W,et al. Numerical study on heat transfer deterioration of supercritical-pressure carbon dioxide in a square channel[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1888-1897 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0533.
[11]
ZHAO C F,DONG H,ZHU J Q,et al. Study on heat transfer of combustor and regenerative cooling channel based on two-way coupling[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):962-974 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0276.
ZHONG D M,GONG H Y,SUN R. An improved STPA for accurate identification of loss scenarios[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):311-323 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0226.
TIAN Qiuning, CAO Yueling, HU Xiaogong, et al. Accuracy evaluation of wide-area differential service for BDS-3[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(5): 967-976. doi: 10.13700/j.bh.1001-5965.2020.0108(in Chinese)
TIAN Qiuning, CAO Yueling, HU Xiaogong, et al. Accuracy evaluation of wide-area differential service for BDS-3[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(5): 967-976. doi: 10.13700/j.bh.1001-5965.2020.0108(in Chinese)
Table
5.
Statistics of single-frequency positioning results on two modes of basic navigation and wide-area differential for single BDS-2 and combination of BDS-2/BDS-3
m
Table
6.
Statistics of dual-frequency positioning results on two modes of basic navigation and wide-area differential for single BDS-2 and combination of BDS-2/BDS-3
m




 下载:
下载:


















 DownLoad:
DownLoad: