


在以信息网络为中心的作战条件下,作战飞机共享态势及资源信息,单机优势可通过协同转化为编队整体优势来发挥作用.以联成一体的作战平台网络为基础,以最佳的打击效果为目的,形成灵活多样的多机协同攻击作战方式.
传统的武器目标分配问题通常是在常规作战方式下,将目标信息获取与导弹发射作为平台自身能力的一部分,综合进行考虑[1, 2].网络化多机协同空战的最大特点在于可将目标信息获取平台与导弹发射平台分开[3, 4, 5],从而武器目标分配问题可转化为探测与攻击任务的分配问题.文献[6]针对多机协同空战中需要中继制导的问题,将探测任务和攻击任务分别进行最优分配,但该模型未考虑其中的成本因素,因为单平台完成对一个目标的探测与攻击任务与两个平台分别完成探测与攻击任务相比具有成本上的优势.
作为多Agent(智能体)系统中一种基本的问题求解机制、协作方法,联盟形成技术已经成为多Agent系统中的一个研究热点[7, 8, 9],现有联盟形成的解决方法主要是基于各种进化算法和群智能算法[10, 11].目前在网络化防空及机器人协作领域已有相关研究[12, 13],但用于协同空战的研究还较少.
本文采用联盟形成理论分析协同制导条件下的空战任务分配,根据空战任务特点构造联盟特征函数,作战平台通过形成联盟完成任务的分配,有效改进和完善了现有协同空战的任务分配问题.
1 基于联盟的任务分配 1.1 联盟任务分解
联盟任务的分解应依据各Agent的能力,以单个Agent所能完成的任务为基本任务单元.将总任务分解为一系列可由单个Agent完成的子任务,直到任务不能被分解.
多机协同多目标攻击任务分配的总任务为打击目标的全体构成的集合,记为T.

协同制导条件下,可将提供目标信息的平台与发射制导武器的平台分开,因此可对任务ti进一步分解:


 |
| 图 1 任务分解结构图 Fig. 1 Structure of task decomposition |
在任务分解的基础上,多平台多目标协同攻击联盟可描述如下.
将对每个目标的攻击看成一个子任务,则有任务集T={t1,t2,…,tn},n为目标数量,tk∈T均有一定的能力需求Dk=[dDk,dAk].dDk,dAk分别为完成跟踪任务及攻击任务的最低能力需求.能力权重向量Wk=[wDk,wAk],且wDk+wAk=1,反映了跟踪任务及攻击任务在tk中的相对重要程度.
将每一个作战平台看成一个Agent,则有Agent集A={a1,a2,…,am},m为作战飞行平台的数量, ai∈A都有一个能力向量Bi=[bDi,bAi].bDi表示平台i对目标的跟踪能力;bAi表示平台i完成对目标发射导弹进行攻击的能力.由于各平台对不同目标的相应能力不同,bDi和bAi分别为n维向量,n为目标的数量.
ai∈A都有一个能力向量Bi=[bDi,bAi].bDi表示平台i对目标的跟踪能力;bAi表示平台i完成对目标发射导弹进行攻击的能力.由于各平台对不同目标的相应能力不同,bDi和bAi分别为n维向量,n为目标的数量.
联盟 ,具有能力向量BC=[bDc,bAc],BC是C中所有Agent协同的总能力.联盟C可以完成任务tk的必要条件是:bjc∈BC,bjc≥djk,如果能够完成,则不再要求其他的Agent加入该联盟.联盟C的特征值用一个特征函数υ(C)给出.
,具有能力向量BC=[bDc,bAc],BC是C中所有Agent协同的总能力.联盟C可以完成任务tk的必要条件是:bjc∈BC,bjc≥djk,如果能够完成,则不再要求其他的Agent加入该联盟.联盟C的特征值用一个特征函数υ(C)给出.

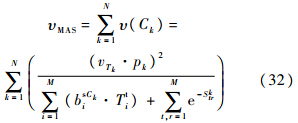
多平台多目标协同攻击的目标分配任务联盟生成问题,就是对任务序列t1,t2,…,tn,寻找n个联盟,使得系统总收益υMAS尽可能大,这是一个复杂的组合优化问题.

1) 作战飞机普遍具有多目标攻击能力,能同时跟踪多个目标,也能够同时给多枚导弹提供中制导信息.即允许每个Agent同时加入多个联盟.
2) 联盟内Agent间的协同有两种情形:
① 协同完成同一个任务单元.如果单架飞机的能力达不到完成相应任务的能力需求,则作战飞机之间协同完成.如多架作战飞机协同跟踪一个目标,提高跟踪精度;或协同攻击一个目标,提高目标的毁伤概率.如果单架飞机的能力能够达到相应任务需求,则不协同.
② 协同完成不同的任务单元.如我机发射、他机制导的攻击方式.
允许一个Agent同时加入多个联盟,也允许一个联盟同时承担多个任务,这两者都存在的情形即为复杂联盟[10].
1.3 作战平台能力分析
各作战平台完成相应任务的能力,采用文献[3]中的方法根据双方的态势、雷达探测能力和武器作战能力构建优势函数来表示.
1.3.1 探测优势
1) 角度优势.
构造方位角优势TD_φ和进入角优势TD_q:
从而得到角度优势:

2) 距离优势.
设雷达最大探测距离为DDmax,目标距离雷达的距离为d,则

3) 探测能力优势.
CR为单部雷达探测能力[14].对其进一步处理,使其取值处于[0, 1].

综合上述3方面的优势函数,可得探测优势:

1.3.2 攻击优势
1) 角度优势.
分别构造方位角优势TA_φ和进入角优势TA_q如下:

从而得到角度优势:

2) 距离优势.
3) 能量优势.
飞机单位能量表示为

相对能量优势表示为
4) 导弹攻击能力优势.
导弹攻击能力CM根据导弹最大有效射程、单发杀伤概率、最大过载等得到[14].对其进行归一化,使其取值处于[0, 1].

综合上述3方面的优势函数,即可得攻击优势:

2 特征函数定义
引入跟踪任务分配决策矩阵X以及攻击任务分配决策矩阵Y:

2.1 联盟报酬
联盟Ck所获得的报酬φ(tk)即联盟完成任务所得到的价值,主要包含两方面:
1) 目标的价值量vTk.
目标的价值量可用目标的威胁值来表示.威胁大的目标价值量也大,应进行优先攻击.本文威胁值的计算采用文献[3]中的方法,目标的威胁即为目标对我方的优势.
2) 对目标的毁伤能力pk.
联盟Ck对目标Tk的毁伤能力,可由联盟的综合能力BCk来衡量.
对目标Tk的探测优势、发射的导弹对目标的攻击优势,决定了单枚导弹对目标Tk的毁伤概率pik.

联盟Ck对目标Tk的协同探测优势为

则联盟Ck对目标Tk的综合毁伤概率为

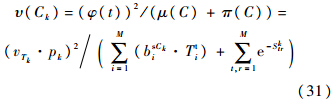
联盟Ck的报酬:

2.2 能力成本
能力成本μ(Ck)指任务分配后,对整个系统带来的影响.它主要包含以下两个方面[15]:
1) 付出的能力.
付出的能力包括占用的能力和空闲的能力,即平台的固有能力.
采用不同于1.3节的方法来计算付出的能力.设平台m的可同时探测的目标数为a,携带制导武器能够同时攻击的目标数为b,则定义平台m的固有能力为

2) 各平台所受的威胁.
将任务i分配给平台m之后造成对系统生存概率的影响.
平台生存概率与平台所参与的任务及任务的威胁度相关,参与的任务越多,任务的威胁度越高;如果双机协同制导,则执行目标探测任务的平台承受着来自目标的威胁,发射平台则相对安全.因此,各平台所受的威胁为

因此,联盟Ck的能力成本为

2.3 通信开销
两机间实现正常通信的必要条件为:发射机发射功率经过空间传输后,到达接收机的信号能量不小于接收机灵敏度要求.
采用文献[16]中建立的两飞行器间无线数据链通信区域的数学模型,计算通信开销.
数据链系统实现通信的条件为



定义

则收发平台间的通信开销为
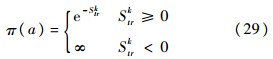
Strk<0,两机间无法通信,故通信开销为∞.
联盟Ck的通信开销为联盟内所有收发平台间通信开销的总和:

2.4 联盟生成问题的数学模型
综上所述,将式(23)、式(26)、式(30)代式(4),有
将上式代入式(5),有
由1.2节的分析可知,上式还应当满足以下约束条件:
1) 联盟j的协同探测能力须满足跟踪任务能力需求.
联盟j的协同探测能力须满足跟踪任务能力需求.
2) 联盟j的协同攻击能力须满足联盟攻击能力需求.
联盟j的协同攻击能力须满足联盟攻击能力需求.
3) 第m架飞机最多同时跟踪的目标数量为NmMAX_DET.
第m架飞机最多同时跟踪的目标数量为NmMAX_DET.
4) 第m架飞机所携带的导弹数量为NmMAX_ATC.
第m架飞机所携带的导弹数量为NmMAX_ATC.
3 基于离散粒子群的联盟生成算法 3.1 离散粒子群优化
离散二进制粒子群算法(DPSO,Discrete binary Particle Swarm Optimization algorithm)[18]的数学描述如下:
3.2 二进制矩阵编码
对粒子的位置矢量采用二进制矩阵编码[11],构建两个m×n的0-1二值矩阵,分别为协同跟踪矩阵及协同攻击矩阵,将这两个矩阵合并为一个粒子.每个粒子为一个m×2n的矩阵,如图 2所示.粒子每一行对应一个Agent,每一列对应着一个子任务.若元素xij为1,表示ai参与子任务tj,为0则表示不参与.
 |
| 图 2 二进制矩阵粒子编码 Fig. 2 Binary matrix particle coding |
按照2.4节的约束条件式(1)、式(2),对粒子各列进行列检查.
如果该列不能完成其对应的任务,则在该列中随机选择一个0元素并将其置为1,直到满足约束条件.
3.3.2 行 检 查
按照2.4节的约束条件式(3)、式(4),按以下步骤对粒子进行行检查.
1) 随机选择一行进行检查,如果该行不需调整,则进入下一行,如需要调整,进入步骤2),如果所有行均处理完毕,则结束调整;
2) 如果第i行需要调整,则依次检查本行中元素1所在的列,将该位置的1置0,计算所在列剩余的所有能力能否完成任务,能则将该位置1置0,进入步骤4);否则保留1不变,继续对该行中其他位置的1元素进行置0的尝试;如果遍历该行所有1元素,该行仍承担过多任务,则进入步骤3);
3) 如果第i行的剩余1元素都不可置0,且超出了该行所能承担的最大任务量,需对该行做如下调整:
① 计算各1元素所在列对应的目标的威胁值,并排序;
② 将威胁值较低的目标所对应的多余的1元素置0;
③ 对置0的元素所在列按照3.3.1 节列检查的方法,进行调整,若该列所选0元素所在行的1元素达到或超出能力范围,则不将其置为1.
4) 更新ai所承担的任务量,满足约束转步骤1),不满足则转步骤2).
为减少能力成本及通信开销,尽量减少粒子各列中1元素的个数,还应对粒子做进一步的调整.调整方法如下:
① 依次将各列中1元素所对应的能力排序;
② 将能力最小的1元素置0,计算剩余1元素能否完成联盟任务.能则将该位置1置0,并重复执行该步骤,直到剩余1元素不能完成联盟任务;不能则保留1不变,结束该列的调整,进入下一列. 3.4 协同作战联盟生成算法
以式(32)作为粒子的适应度函数,用DPSO算法求解多平台多目标协同作战联盟生成问题,步骤如下:
1) 初始化.按照3.2节的方案随机生成S个粒子.每个粒子的随机生成值即为初始位置矢量xi,速度矢量Vi设为0;对每个粒子中的两个矩阵进行编码可行性检查,形成初始种群,计算每个个体的适应度,选择适应度最大的粒子的位置为Pg,每个粒子的当前位置为Pi.
2) 按式(33)、式(34)更新种群中每个粒子的速度矢量和位置矢量,产生新一代种群.对新种群进行可行性检查,计算新种群中粒子的适应度,更新Pi和Pg.
3) 如果有某个粒子陷在Pg上不动,则随机初始化该粒子的位置,并进行编码可行性检查.
4) 如果达到最大迭代次数,结束进化,得到最优粒子的位置和适应度,否则转步骤2).
4 实验结果与分析
设红方有5架飞机协同截击蓝方7个目标.图 3为红蓝双方态势.表 1第1行为完成各任务的能力需求;其他行为当前态势下,计算出红方相对蓝方的探测优势和攻击优势.
 |
| 图 3 红蓝双方态势图 Fig. 3 Situation of the red and blue sides |
| Agent | 探测能力 | 攻击能力 | ||||||||||||
| bD1 | bD2 | bD3 | bD4 | bD5 | bD6 | bD7 | bA1 | bA2 | bA3 | bA4 | bA5 | bA6 | bA7 | |
| a1 | 0.851 | 0.808 | 0.760 | 0.715 | 0.681 | 0.642 | 0.618 | 0.224 | 0.201 | 0.160 | 0.129 | 0.114 | 0.101 | 0.103 |
| a2 | 0.834 | 0.897 | 0.834 | 0.782 | 0.736 | 0.688 | 0.658 | 0.217 | 0.250 | 0.217 | 0.174 | 0.138 | 0.121 | 0.107 |
| a3 | 0.756 | 0.810 | 0.869 | 0.876 | 0.810 | 0.750 | 0.709 | 0.149 | 0.186 | 0.232 | 0.229 | 0.197 | 0.148 | 0.129 |
| a4 | 0.680 | 0.714 | 0.779 | 0.843 | 0.909 | 0.843 | 0.779 | 0.120 | 0.135 | 0.159 | 0.202 | 0.250 | 0.202 | 0.159 |
| a5 | 0.617 | 0.638 | 0.690 | 0.728 | 0.806 | 0.887 | 0.882 | 0.098 | 0.108 | 0.127 | 0.134 | 0.170 | 0.220 | 0.225 |
| dik | 0.81 | 0.86 | 0.88 | 0.89 | 0.90 | 0.87 | 0.85 | 0.16 | 0.19 | 0.22 | 0.24 | 0.26 | 0.19 | 0.17 |
实验环境如下:粒子个数为30,最大迭代次数为200,Vmax=6.0;设每个平台可同时跟踪的目标数为4,可同时攻击的目标数为3,平台1、平台3、平台5携带2枚导弹,其余为3枚.
图 4为某次实验的全局最优解进化曲线,以及某个粒子的个体适应度进化曲线.表 2为实验搜索到的最优分配策略.由表 2可以看出,在完成任务的前提下,联盟的形成减少了参与任务的平台数量,平台1未参与任务,这与实际情况相符.
 |
| 图 4 实验进化曲线 Fig. 4 Experimental evolution curve |
| Agent | C1 | C2 | C3 | C4 | C5 | C6 | C7 | |||||||
| t1D | t1A | t2D | t2A | t3D | t3A | t4D | t4A | t5D | t5A | t6D | t6A | t7D | t7A | |
| a1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| a2 | 1 | 1 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| a3 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 0 | 0 | 0 |
| a4 | 0 | 0 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| a5 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
由图 3可知,平台1所处的位置相对其他平台并不占优,因此,该平台未分配任务是合理的.此外,单个平台能够完成的任务,由单个平台完成,而不选择协同完成,减少了能力成本及通信开销.
并非任何情况下都适用于协同制导这一作战形式,联盟C5为a4协同制导a3和a4发射的两枚导弹协同攻击目标.因为a4探测能力具备任务达到探测任务要求,但攻击能力不足以完成对目标t5攻击任务,因此由a3和a4协同攻击,a4制导. 5 结 束 语
由于引入了联盟形成的相关概念,本文模型在处理协同条件下的任务分配时同时兼顾了收益及成本,在保证足够任务收益的前提下,尽量减少参与的平台数量.仿真结果也较符合空战的实际情形.为解决网络化作战条件下的任务分配问题提供了新的尝试.另外,文中对任务能力需求的确定还不完善,因为能力需求决定了该任务是否需要多个Agent协同,以及任务能否被较好地完成.本文根据任务的重要程度设定能力需求值,但未提出详细的计算模型,这需要进一步的研究.
| [1] | 高永,向锦武.超视距多机协同空战目标分配算法[J].北京航空航天大学学报,2007,33(3):286-289 Gao Yong,Xiang Jinwu.Target assignment in BVR air combat[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(3):286-289(in Chinese) |
| Cited By in Cnki (36) | |
| [2] | 王强,丁全心,张安,等.多机协同对地攻击目标分配算法[J].系统工程与电子技术,2012,34(7):1400-1405 Wang Qiang,Ding Quanxin,Zhang An,et al.Target allocation algorithm for multi-cooperative air-to-ground attack[J].Systems Engineering and Electronics,2012,34(7):1400-1405(in Chinese) |
| Cited By in Cnki | |
| [3] | 童明成,张凤霞,贺建良.网络环境下空中多平台联合攻击作战方式[J].电光与控制,2009,16(5):19-22 Tong Mingcheng,Zhang Fengxia,He Jianliang.Aerial multi-platform joint-attack warfare modes in network environment[J].Electronics Optics & Control,2009,16(5):19-22(in Chinese) |
| Cited By in Cnki (7) | |
| [4] | 黄俊,孙亮,于雷,等.网络化条件下战斗机静默攻击技术研讨[J].电光与控制,2009,16(7):9-12 Huang Jun,Sun Liang,Yu Lei,et al.Cooperative silence attack technology of fighter based on network warfare[J].Electronics Optics & Control,2009,16(7):9-12(in Chinese) |
| Cited By in Cnki (2) | |
| [5] | 肖冰松.多机编队协同空战关键技术研究[D].西安:空军工程大学,2010 Xiao Binsong.Research on key technology in cooperative multi-fighter air combat[D].Xi’an:Air Force Engineering University, 2010(in Chinese) |
| [6] | 肖冰松,方洋旺.多机协同对空目标探测与攻击任务的最优分配[J].火力与指挥控制,2011,36(6):11-23 Xiao Bingsong,Fang Yangwang.Optimal allocation of aerial target detection and attack in cooperative multi-fighter air combat[J].Fire Control and Command Control,2011,36(6):11-23(in Chinese) |
| Cited By in Cnki (1) | |
| [7] | Shehory O,Kraus S.Methods for task allocation via agent coalition formation[J].Artificial Intelligence,1998,101(1/2):165-200 |
| Click to display the text | |
| [8] | Breban S,Vassileva J.A coalition formation mechanism based on inter-Agent trust relationships[C]//Proceedings of the International Conference on Autonomous Agents.Washington,DC:Association for Computing Machinery,2002,2:306-307 |
| Click to display the text | |
| [9] | Gong Y,Yao L,Zhang W M.Research of coalition formation in time bounded multi-agent systems[C]//Proceedings of 2002 International Conference on Machine Learning and Cybernetics.Piscataway,NJ:Institute of Electrical and Electronics Engineers Inc,2002,1:194-198 |
| Click to display the text | |
| [10] | 张国富.基于群智能的复杂联盟机制研究[D].合肥:合肥工业大学,2008 Zhang Guofu.Research on complicated coalition mechanism based on swarm intelligence[D].Hefei:Hefei University of Technology,2008(in Chinese) |
| [11] | 蒋建国,张国富,齐美彬,等.基于离散粒子群求解复杂联盟的并行生成[J].电子与信息学报,2009,31(3):519-522 Jiang Jianguo,Zhang Guofu,Qi Meishan,et al.Complicated coalition parallel generation based on discrete particle swarm optimization[J].Journal of Electronics & Information Technology,2009,31(3):519-522(in Chinese) |
| Cited By in Cnki (8) | |
| [12] | 唐苏妍.网络化防空导弹体系动态拦截联盟形成机制与方法研究[D].长沙:国防科学技术大学,2011 Tang Suyan.Research on dynamic interception coalition formation mechanism and method in networked air defense missile systems[D].Changsha:National University of Defense Technology,2011(in Chinese) |
| [13] | Vig L,Adams J A.Multi-robot coalition formation[J].IEEE Transactionson Robotics,2006,22(4):637-649 |
| Click to display the text | |
| [14] | 朱宝鎏,朱荣昌,熊笑非.作战飞机效能评估[M].北京:航空工业出版社,2006 Zhu Baoliu,Zhu Rongchang,Xiong Xiaofei.Effectiveness evaluation of combat aircraft[M].Beijing:Aviation Industry Press,2006(in Chinese) |
| [15] | 寇英信,王琳,周中良.多目标攻击条件下的作战任务分配模型研究[J].系统仿真学报,2008,20(16):4408-4411 Kou Yingxin,Wang Lin,Zhou Zhongliang.Study of combat task allocation model in multi-target attack condition[J].Journal of System Simulation,2008,20(16):4408-4411(in Chinese) |
| Cited By in Cnki (16) | |
| [16] | 余伏章,蔡志勇,胡颖琼.两飞行器间无线数据链通信区域建模[J].北京航空航天大学学报,2009,35(9):1117-1120 Yu Fuzhang,Cai Zhiyong,Hu Yingqiong.Modeling of wireless datalink communication region between two aircraft[J].Journal of Beijing University of Aeronautics and Astronautics,2009,35(9):1117-1120(in Chinese) |
| Cited By in Cnki (5) | |
| [17] | 罗一锋,李含辉,黄继进.超短波通信链路分析[J].现代电子技术,2006,224(9):41-45 Luo Yifeng,Li Hanhui,Huang Jijin.An approach to ultrashort wave link[J].Modern Electronics Technique,2006,224(9):41-45(in Chinese) |
| Cited By in Cnki (16) | |
| [18] | Kennedy J,Eberhart R C.Discrete binary version of the particle swarm optimization algorithm[C]//Proceedings of the IEEE International Conference on Systems,Man and Cybernetics.Piscataway,NJ:IEEE Press,1997,5:4104-4108 |
| Click to display the text |