| Citation: | DU Q F,JING W X,GAO C S,et al. Dual-loop control of mass-actuated quadrotor UAV considering dynamic characteristics of moving mass[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):861-873 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0350

|
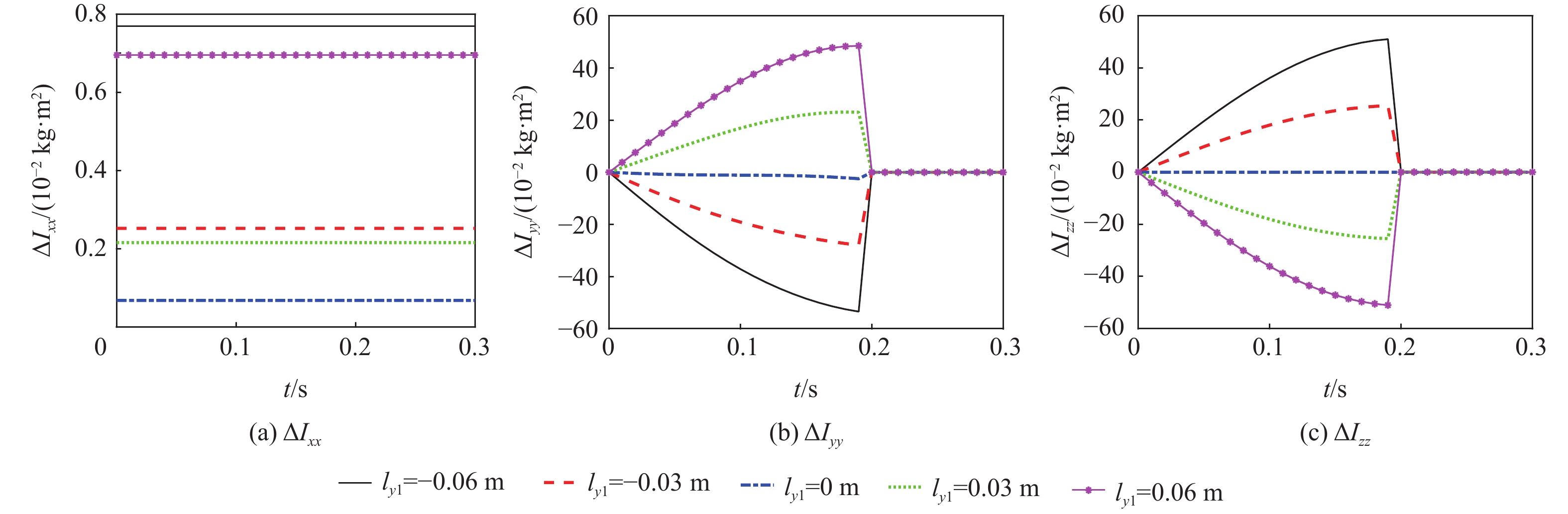
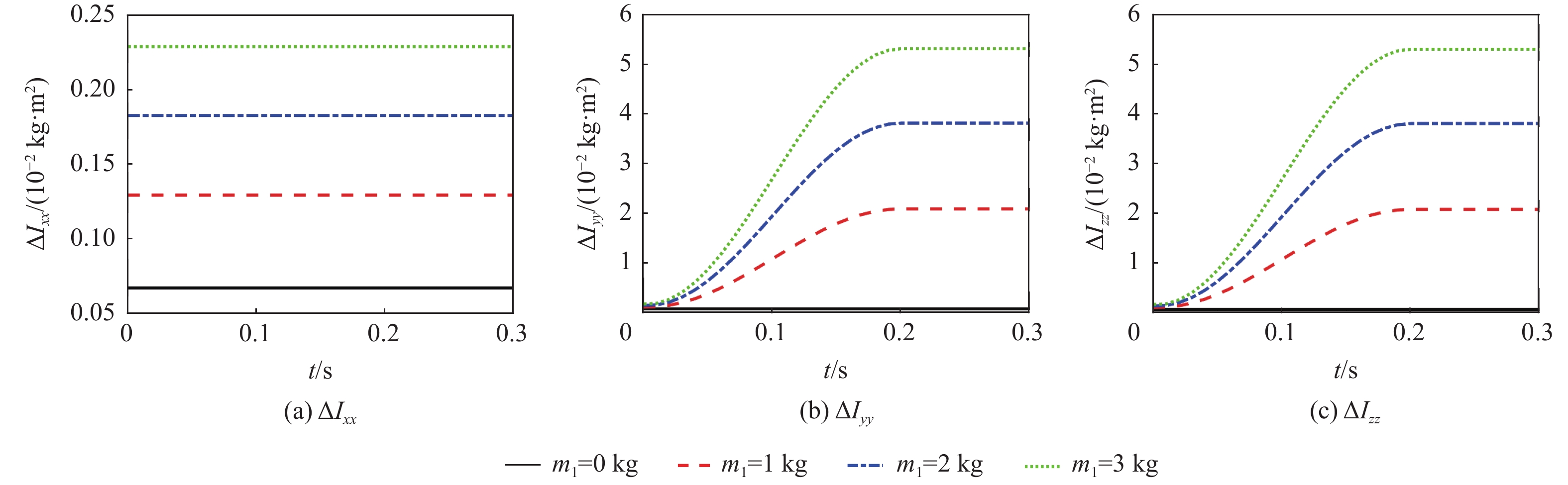
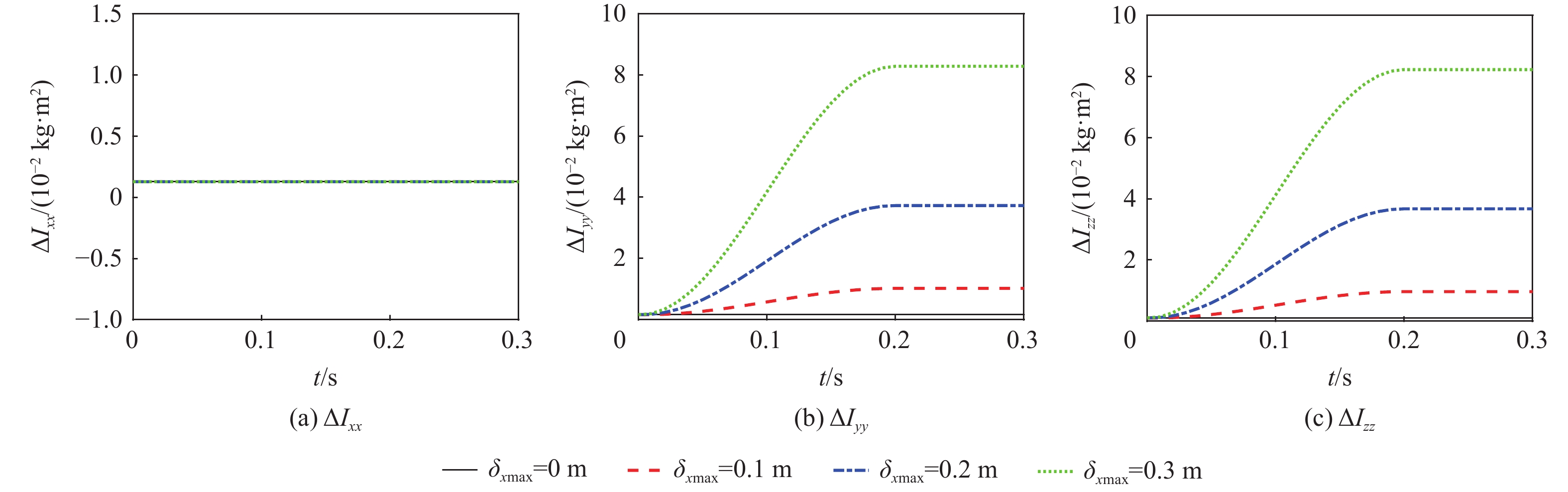
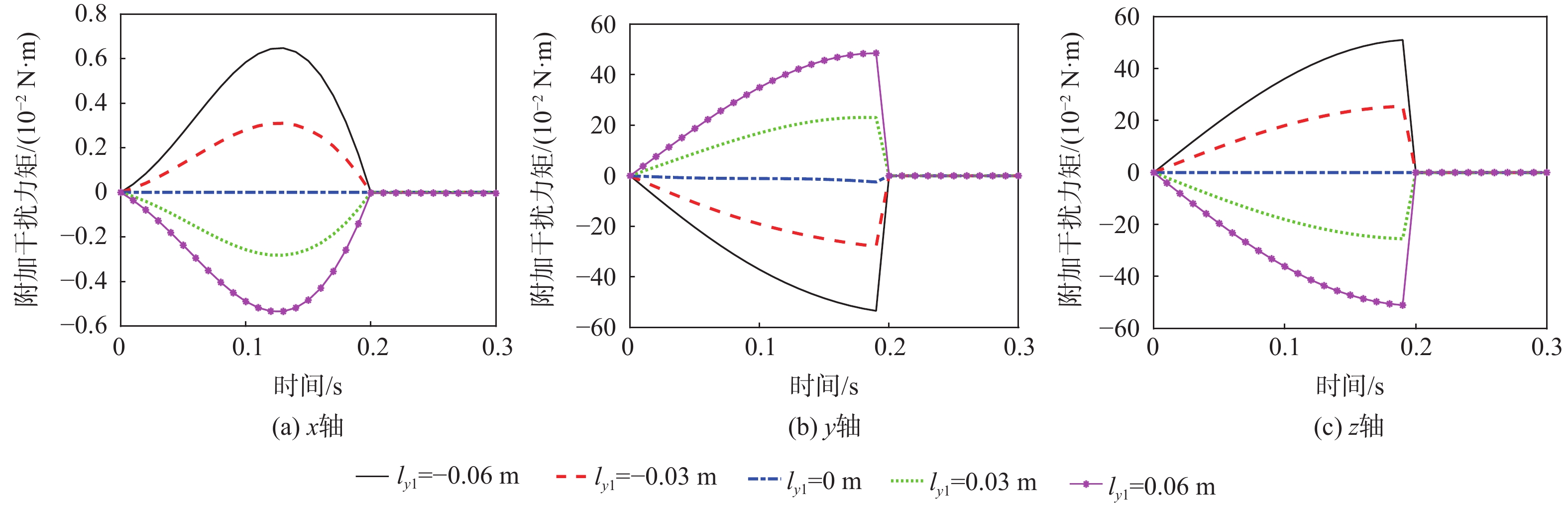
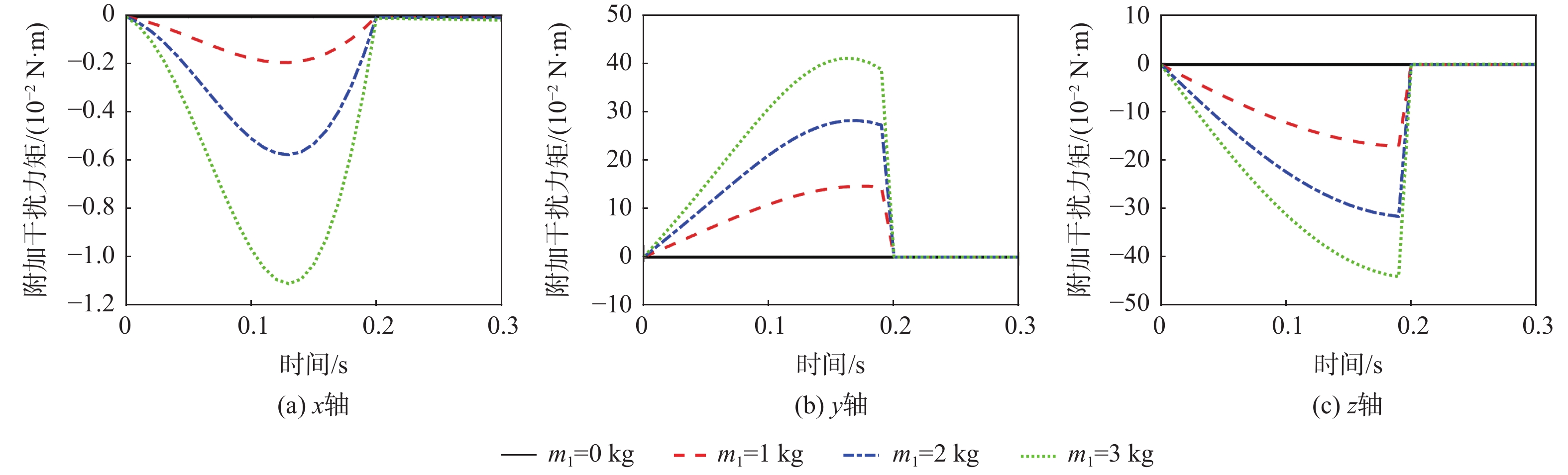
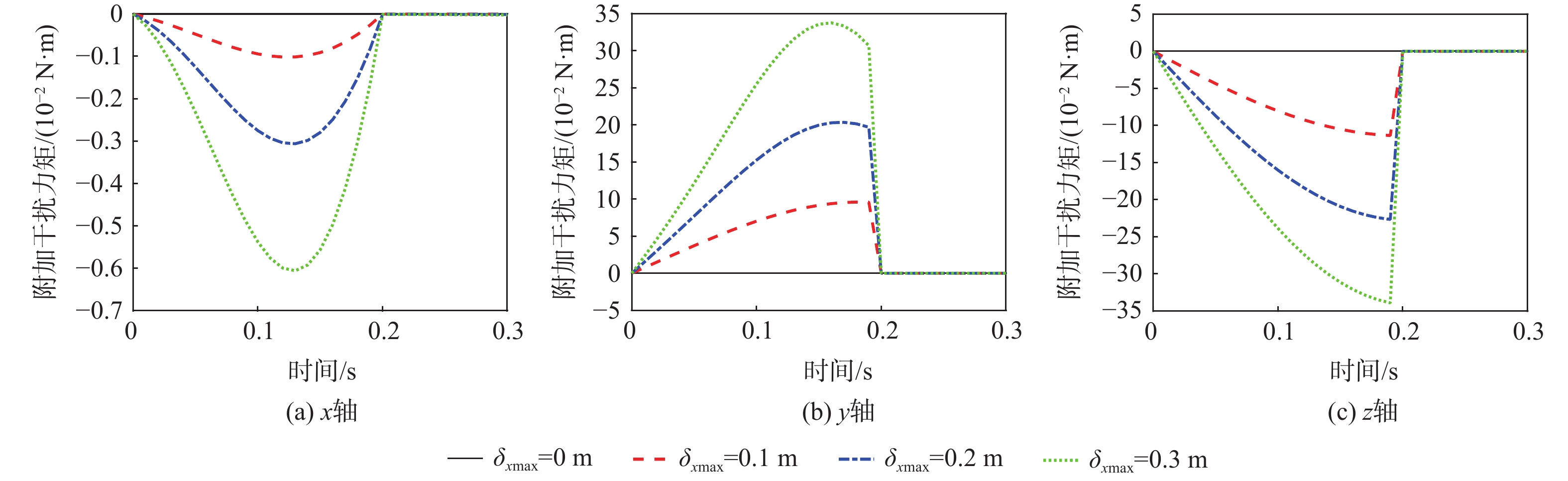
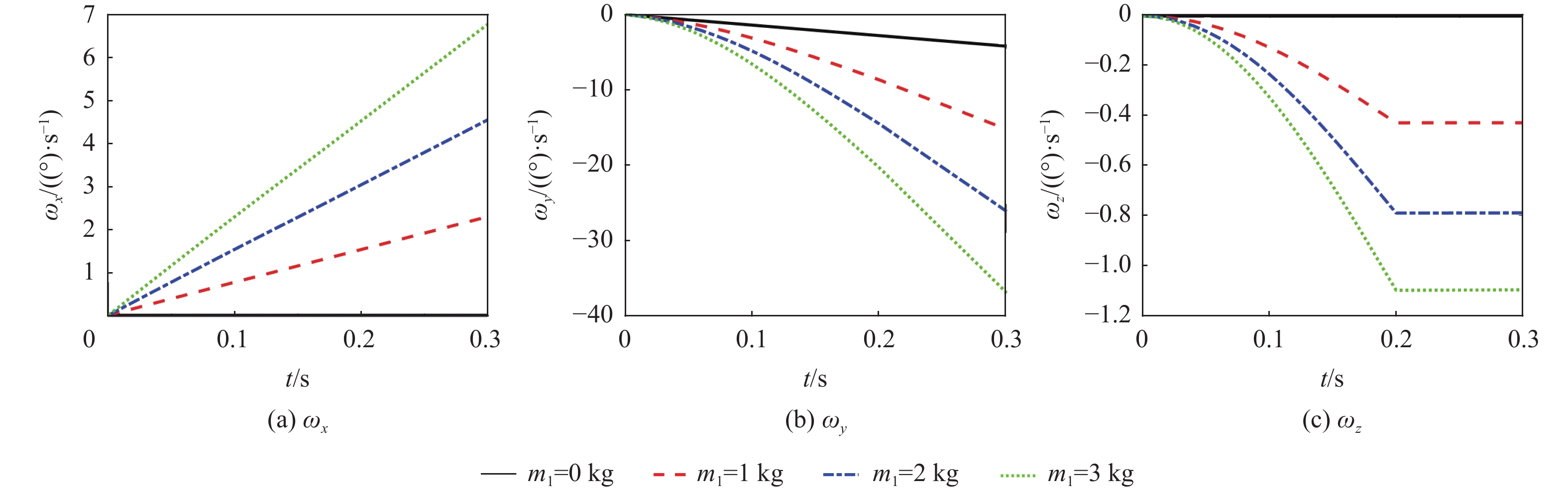
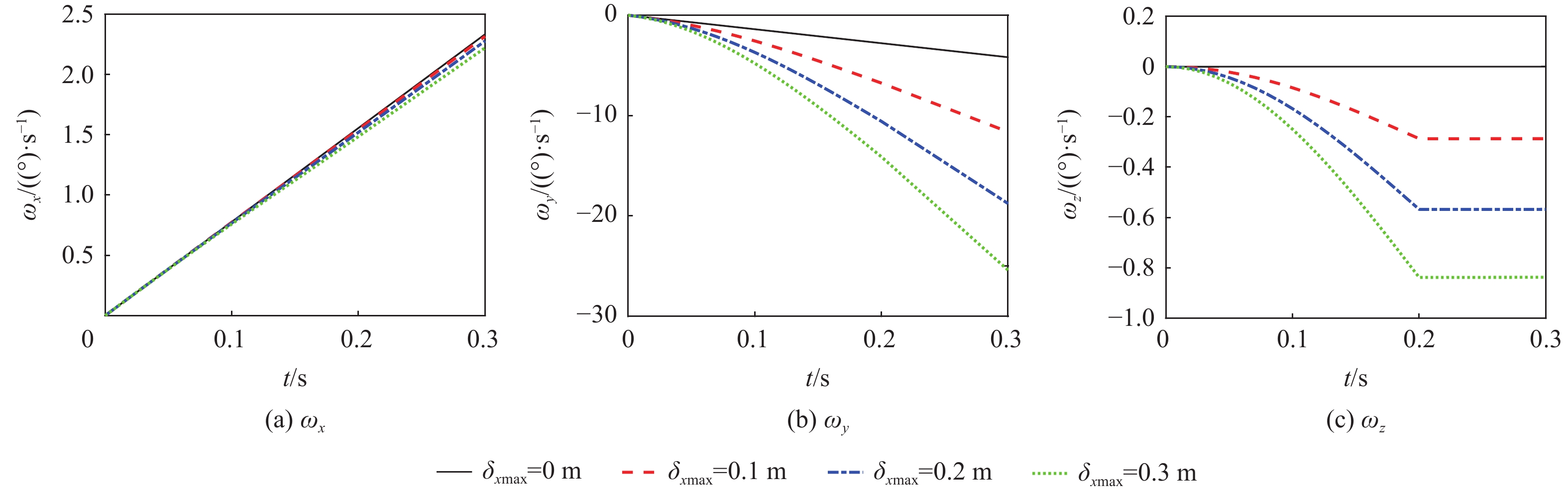
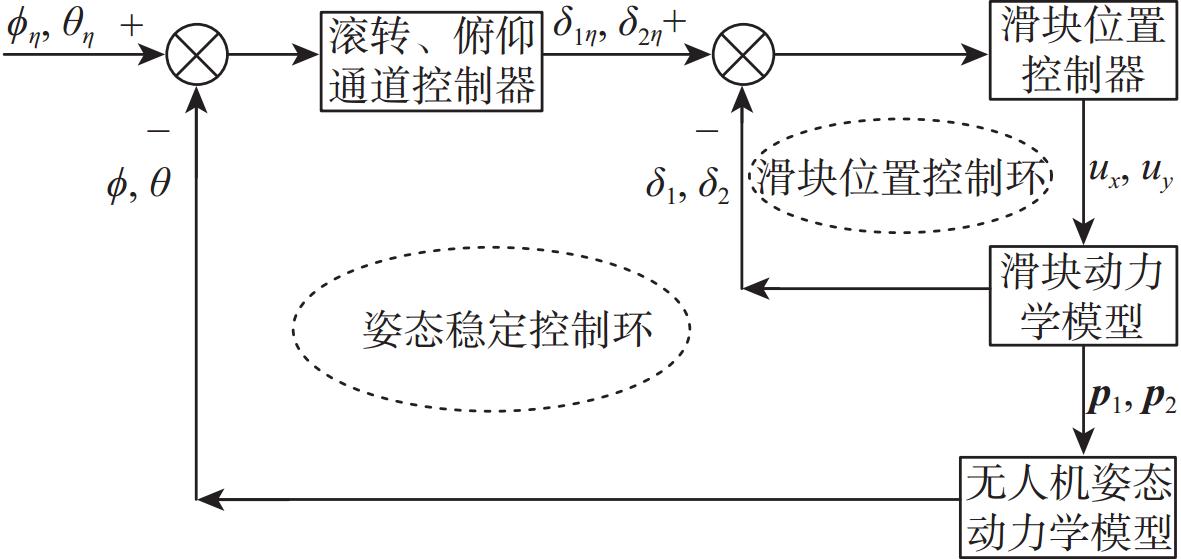
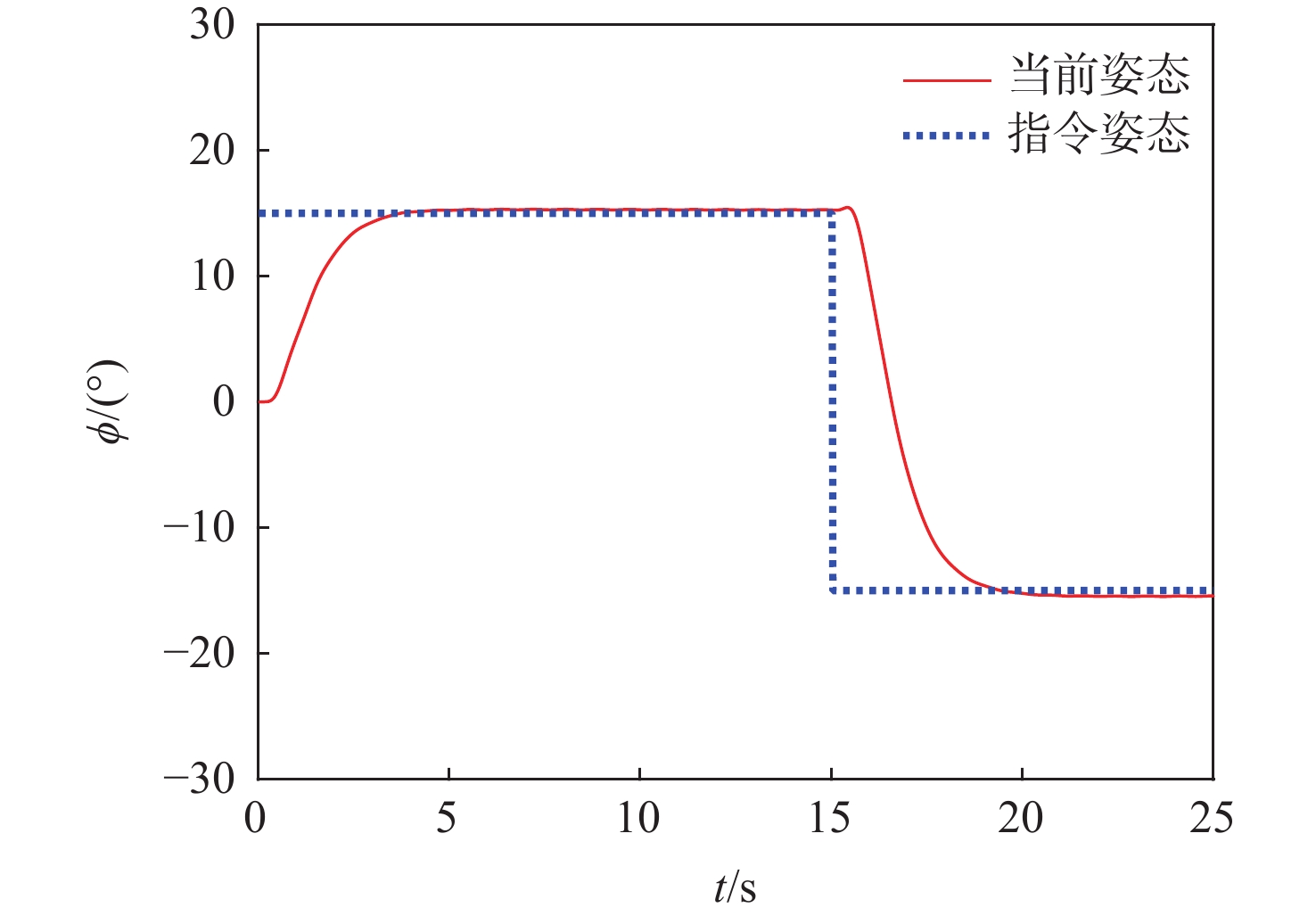
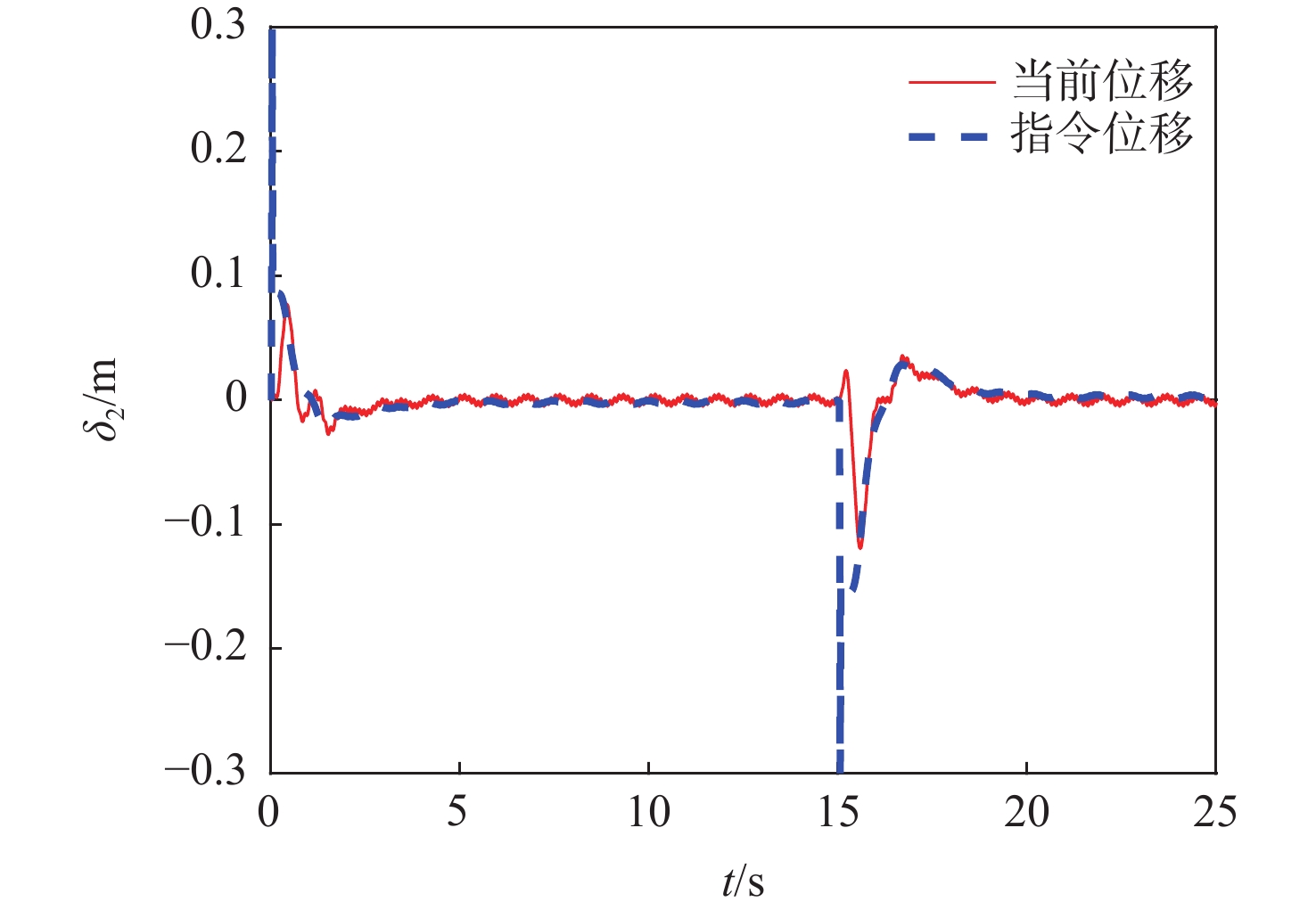
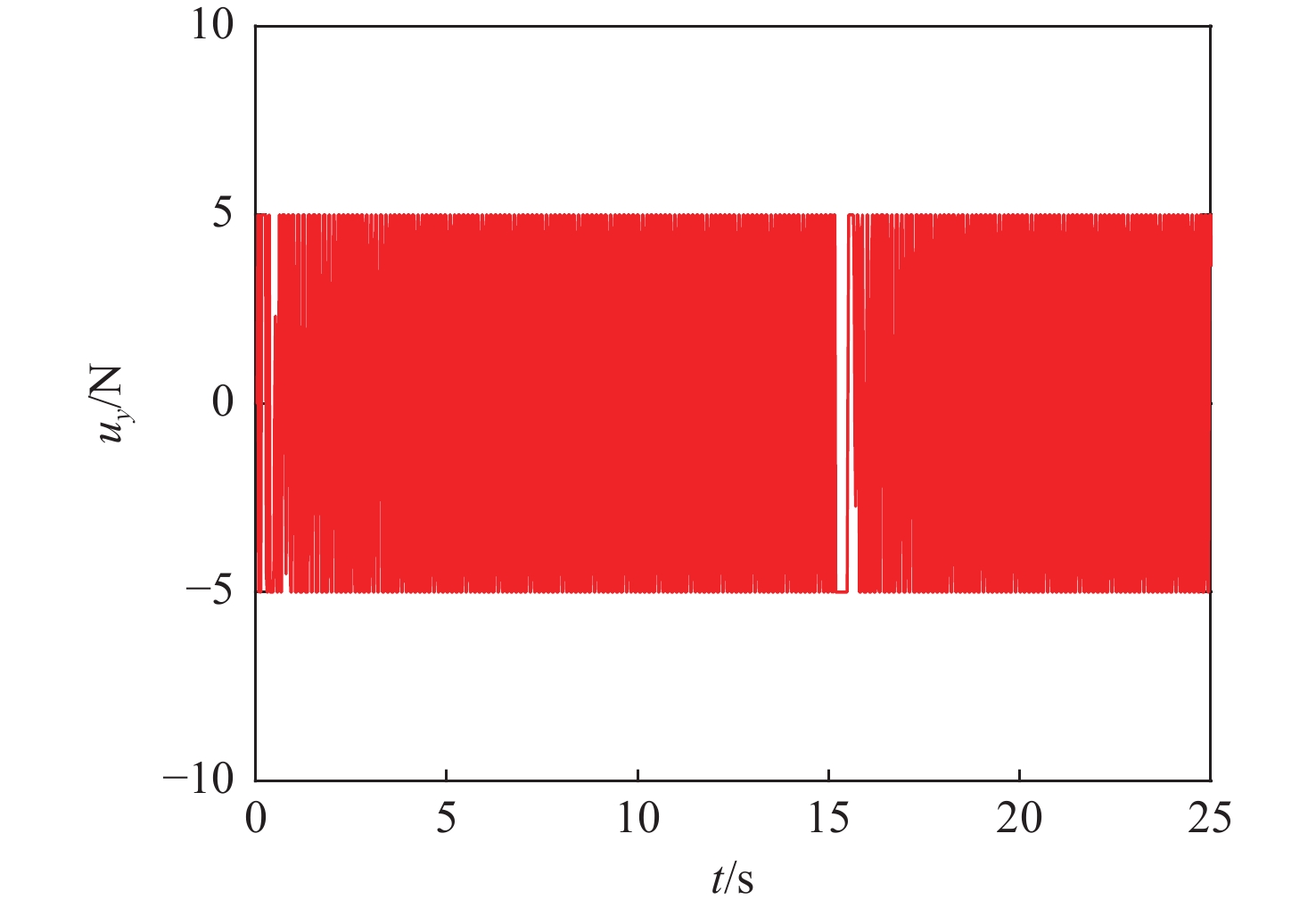
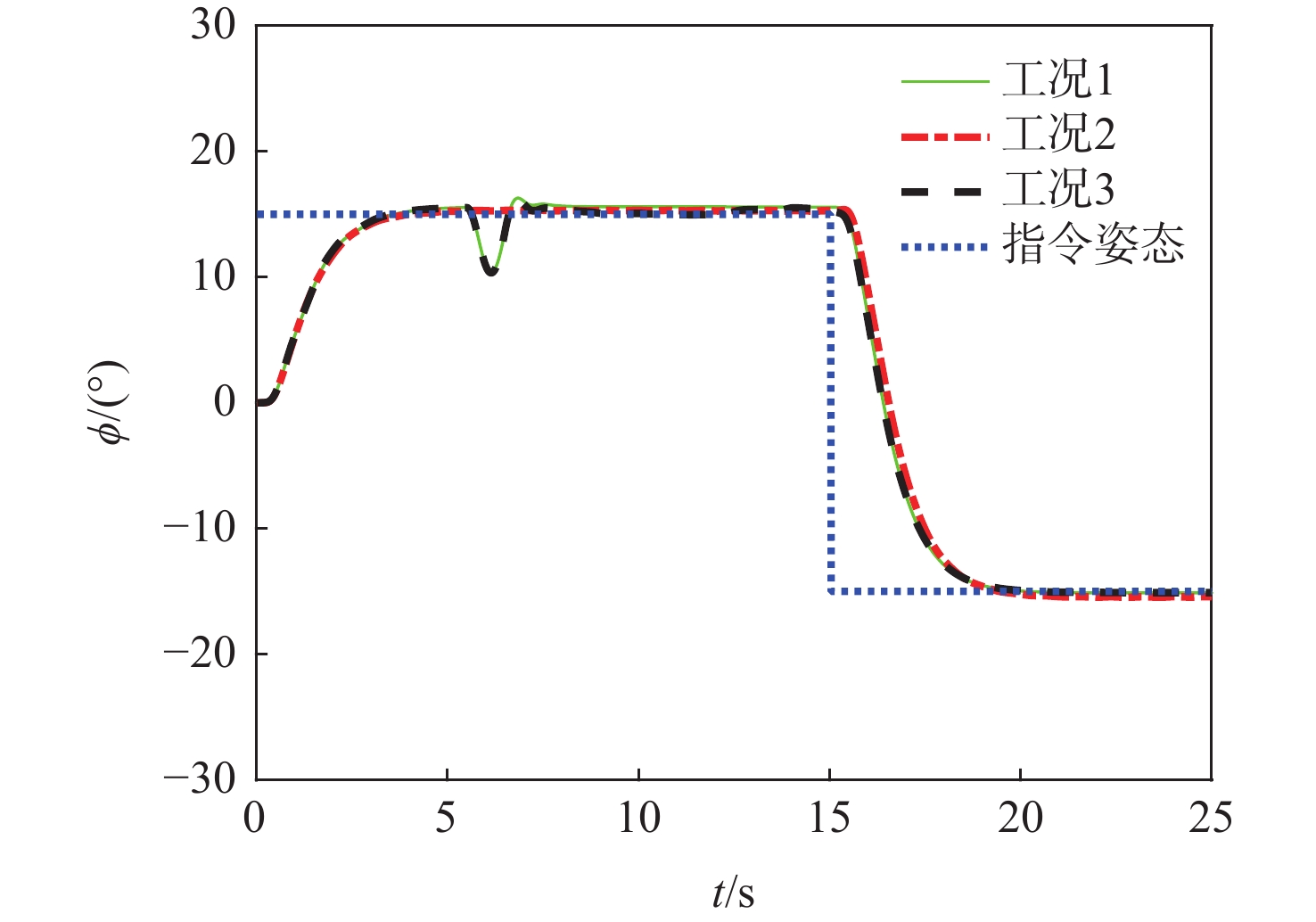
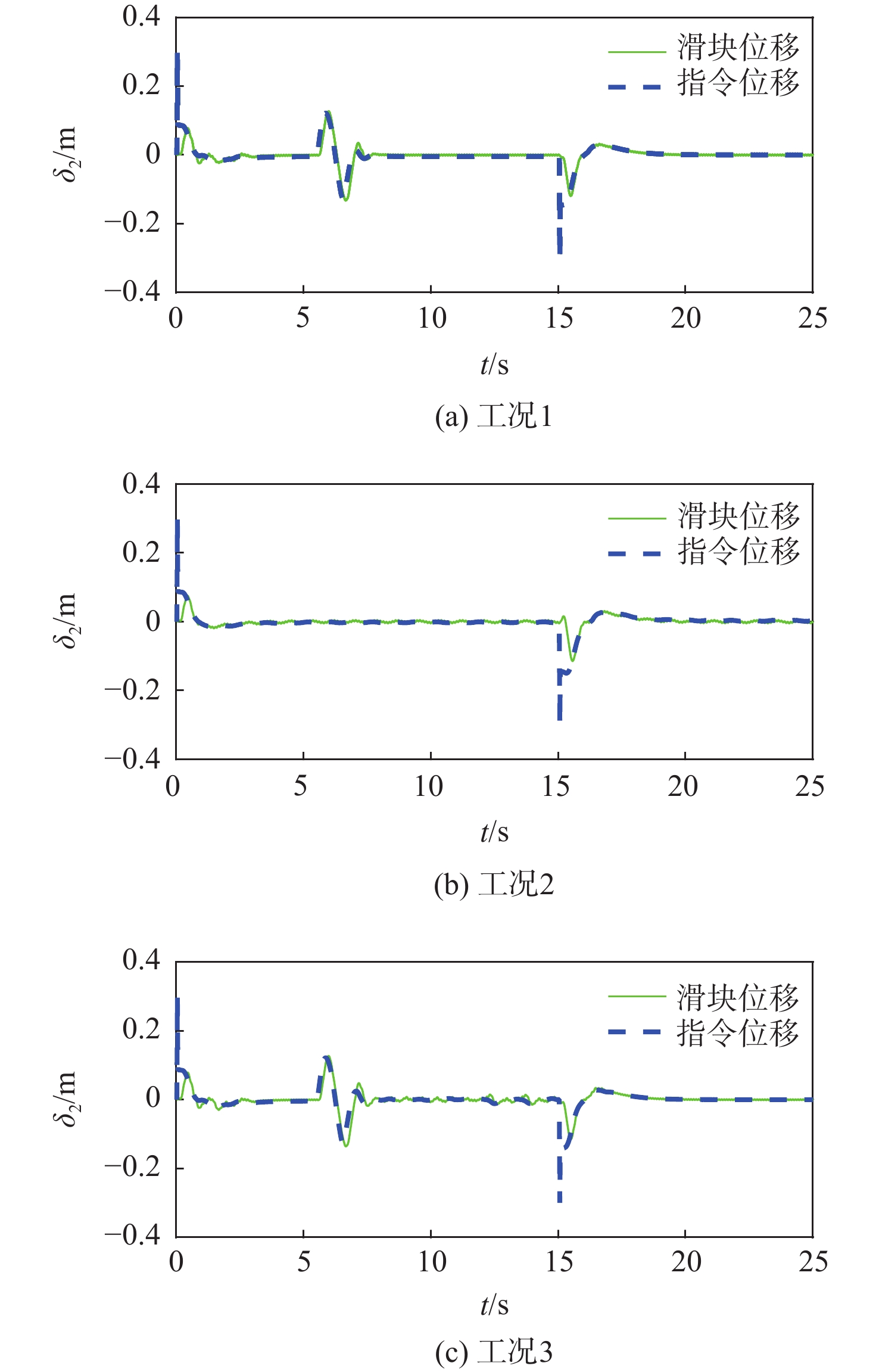
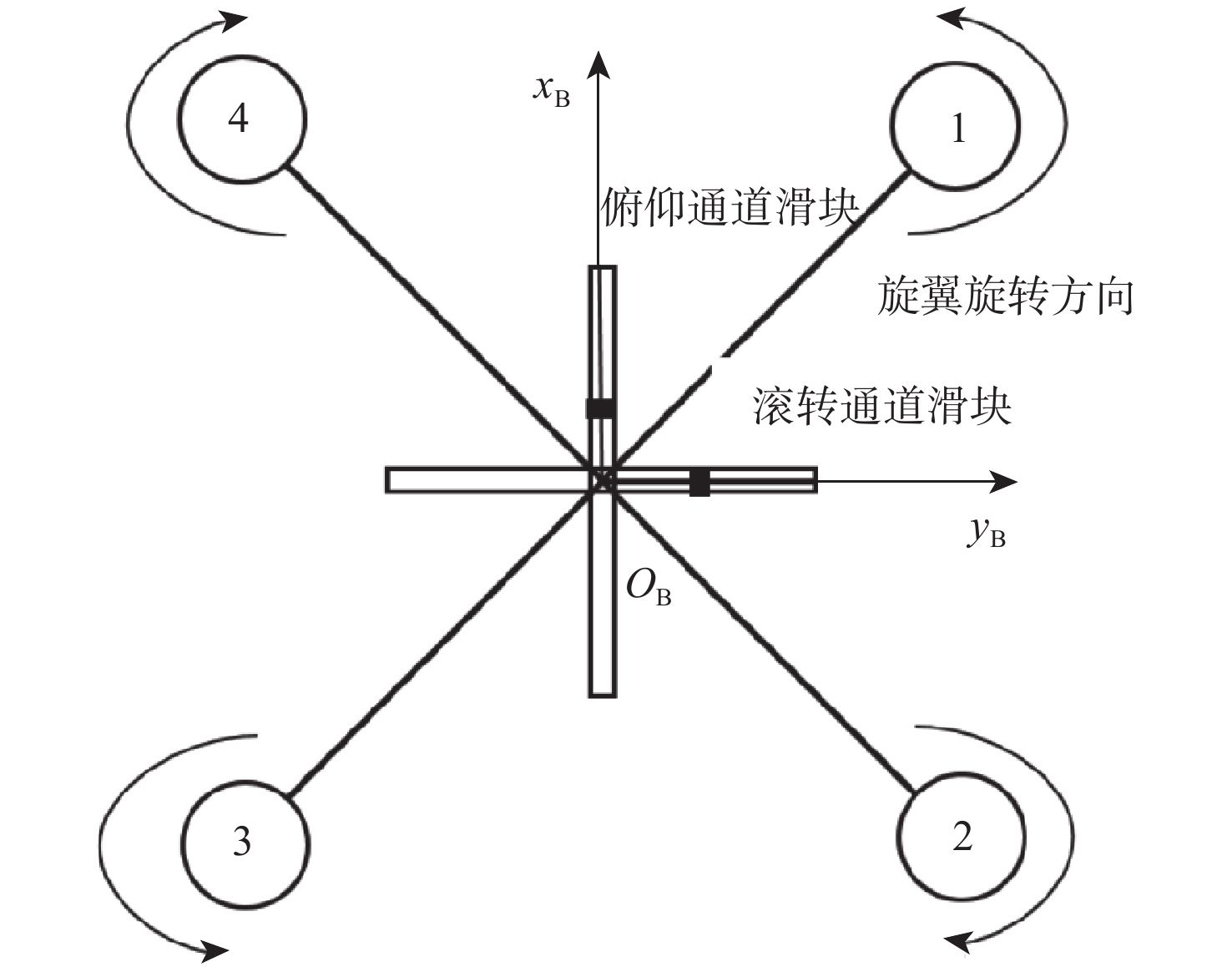
The study focuses on the severe attitude jitter brought on by the extra disturbance torque generated by the dynamic properties of the moving mass. It investigates the moving mass parameter design and attitude/servo dual-loop control of the mass-actuated quadrotor UAV. Firstly, the influence of the moving mass introduction on the system is clarified and various additional disturbance torque introduced by dynamic characteristics of the moving mass is given by establishing an eight-degree-of-freedom motion model of mass-actuated quadrotor UAV. Next, in order to lessen the coupling and disturbance of the moving mass to the system, characteristics including the installation position, mass, and various maximum displacements of the moving mass are examined and constructed.Finally, an attitude/servo dual-loop dynamic sliding mode controller is designed with the mass driving force as the control input, and the nonlinear disturbance observer is used to estimate and compensate for the composite disturbance. The results of the simulation demonstrate that the controller has high anti-interference performance and robustness when taking into account the dynamic features of the moving mass. It can also achieve attitude control of the mass-actuated quadrotor UAV.

| [1] |
SD A, JR A, AR B, et al. Configurations, flight mechanisms, and applications of unmanned aerial systems: A review[J]. Progress in Aerospace Sciences, 2020, 121: 100694. doi: 10.1016/j.paerosci.2020.100694
|
| [2] |
SHAKHATREH H, SAWALMEH A, AI-FUQAHA A, et al. Unmanned aerial vehicles: A survey on civil applications and key research challenges[J]. IEEE Access, 2018, 7: 48572-48634.
|
| [3] |
KANISTRAS K, MARTINS G, RUTHERFORD M J, et al. A survey of unmanned aerial vehicles (UAVs) for traffic monitoring[M]. Berlin: Springer Netherlands, 2015: 8-15.
|
| [4] |
TB A, JM A, RMA B, et al. On-board implementation and experimental validation of collaborative transportation of loads with multiple UAVs-science direct[J]. Aerospace Science and Technology, 2020, 107: 106284. doi: 10.1016/j.ast.2020.106284
|
| [5] |
ARIYIBI S O, TEKINAIP O. Quaternion-based nonlinear attitude control of quadrotor formations carrying a slung load[J]. Aerospace Science and Technology, 2020, 105(14): 105995.
|
| [6] |
VANDANIPOUR M, KHODABANEH M. Adaptive fractional order sliding mode control for a quadrotor with a varying load[J]. Aerospace Science and Technology, 2019, 86: 737-747. doi: 10.1016/j.ast.2019.01.053
|
| [7] |
TOTOKI H, OCHI Y, SATO M, et al. Design and testing of a low-order flight control system for quad-tilt-wing UAV[J]. Journal of Guidance, Control, and Dynamics, 2016, 39(10): 2426-2433. doi: 10.2514/1.G001577
|
| [8] |
TRAN AT, SAKAMOTO N, SATO M, et al. Control augmentation system design for quad-tilt-wing unmanned aerial vehicle via robust output regulation method[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(1): 357-369. doi: 10.1109/TAES.2017.2650618
|
| [9] |
李新凯, 张宏立, 范文慧. 非匹配扰动下变体无人机预设性能控制[J]. 航空学报, 2022, 43(2): 382-397. doi: 10.7527/j.issn.1000-6893.2022.2.hkxb202202031
LI K X, ZHANG H L, FAN W H. Prescribed performance control for morphing aerospace vehicle under mismatched disturbances[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(2): 382-397(in Chinese). doi: 10.7527/j.issn.1000-6893.2022.2.hkxb202202031
|
| [10] |
ERTURK S, DASKIRAN O, DOGAN A. Trim analysis of a moving-mass actuated airplane[C]//AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2012: 4647.
|
| [11] |
ERTURK S, DOGAN A. Trim analysis of a moving-mass actuated airplane in steady turn[C]//51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Reston: AIAA, 2013: 0622.
|
| [12] |
ERTURK S, DOGAN A. Trim analyses of mass-actuated airplane in cruise and steady-state turn[J]. Journal of Aircraft, 2017, 54(4): 1587-1594. doi: 10.2514/1.C034200
|
| [13] |
ERTURK S, DOGAN A. Trim analyses of mass-actuated airplane in steady-state climb and descent[C]//AIAA Atmospheric Flight Mechanics Conference. Reston: AIAA, 2017: 1585.
|
| [14] |
邱潇颀, 高长生, 荆武兴. 变质心固定翼无人机动力学分析与抗扰控制[J]. 北京航空航天大学学报, 2022, 48(3): 430-437.
QIU X Q, GAO C S, JING W X. Dynamic analysis and disturbance rejection control of mass-actuated fixed-wing UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(3): 430-437(in Chinese).
|
| [15] |
HAUS T, ORSAG M, BOGDAN S. Design considerations for a large quadrotor with moving mass control[C]//2016 International Conference on Unmanned Aircraft Systems (ICUAS). Piscataway: IEEE Press, 2016: 1327-1334.
|
| [16] |
DARVISHPOOR S, ROSHANIAN J, TAYEFI M. A novel concept of VTOL bi-rotor UAV based on moving mass control[J]. Aerospace Science and Technology, 2020, 107: 106238.
|
| [17] |
IDRISSI M, SALAMI M, ANNAZ F. Modelling, simulation and control of a novel structure varying quadrotor[J]. Aerospace Science and Technology, 2021, 119: 107093. doi: 10.1016/j.ast.2021.107093
|
| [18] |
陆正亮. 快速机动卫星质量矩姿态控制技术研究[D]. 南京: 南京理工大学, 2018: 6-7.
LU Z L. Study on mass moment attitude control for fast orbit maneuver satellite[D]. Nanjing: Nanjing University of Science and Technology, 2018: 6-7(in Chinese).
|
| [19] |
CHEN W H, BALLANCE D J. A nonlinear disturbance observer for robotic manipulators[J]. Industrial Electronics IEEE Transactions on Industrial Electronics, 2000, 47(4): 932-938. doi: 10.1109/41.857974
|
Figures(15) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: